Downloaded 20 times





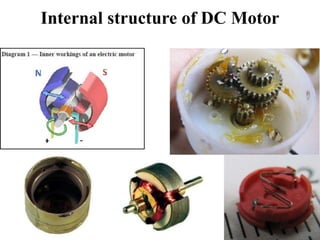


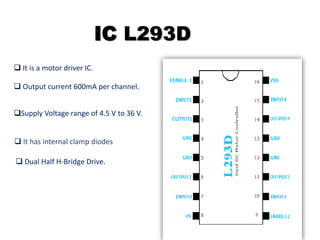
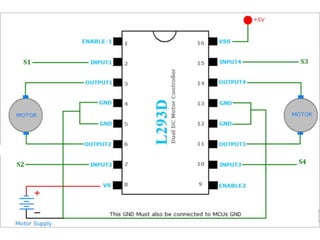
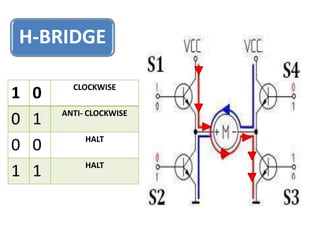
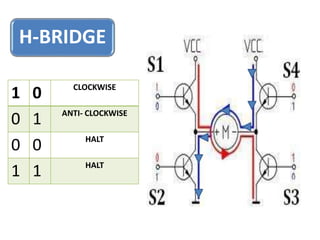

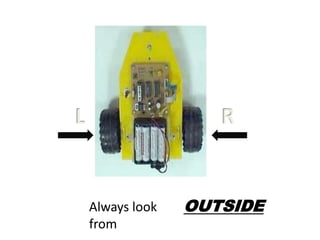

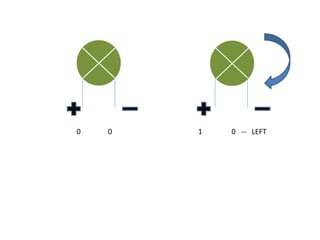
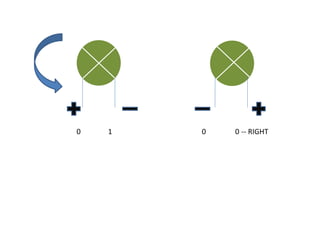


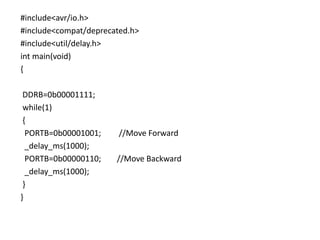

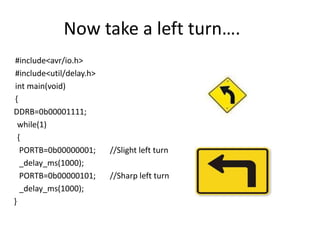


The document discusses different types of electric motors, including stepper, servo, and DC motors, along with their applications. It also covers the use of a motor driver IC (L293D) for controlling motor movements and provides code examples for programming motor functions using AVR. Essential motor commands and configurations for controlling direction and motion of a bot are included.