Downloaded 27 times

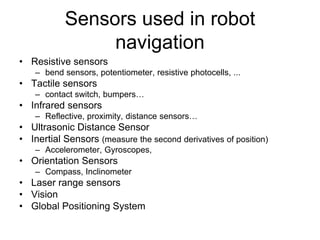
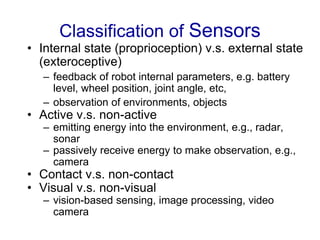
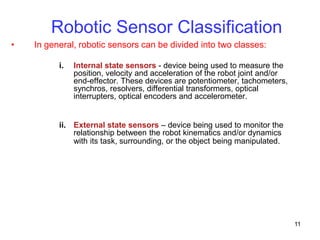
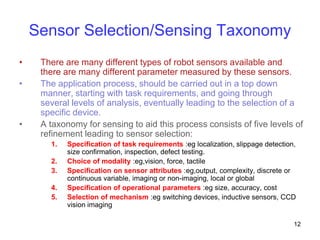






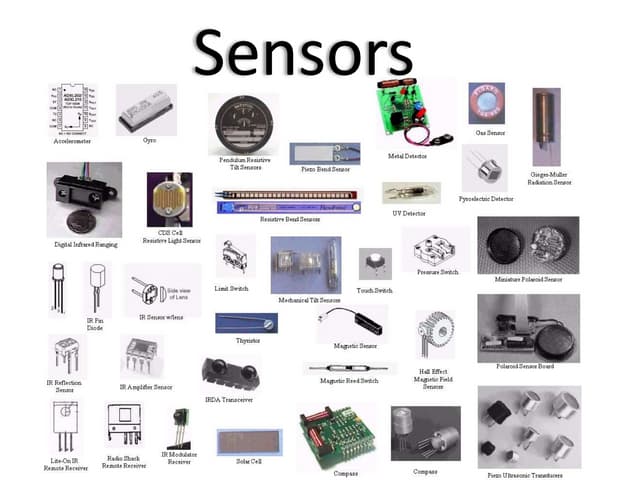
The document discusses the importance of sensory feedback in industrial robots, emphasizing how sensors enable robots to operate in unpredictable environments and ensure safety when working alongside humans. It categorizes various sensors based on their function, such as internal vs external, active vs passive, and contact vs non-contact, while providing specific examples and applications for each type. Additionally, it outlines the principles of sensor operation and the criteria for sensor selection based on specific task requirements.




















































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)