Download to read offline
















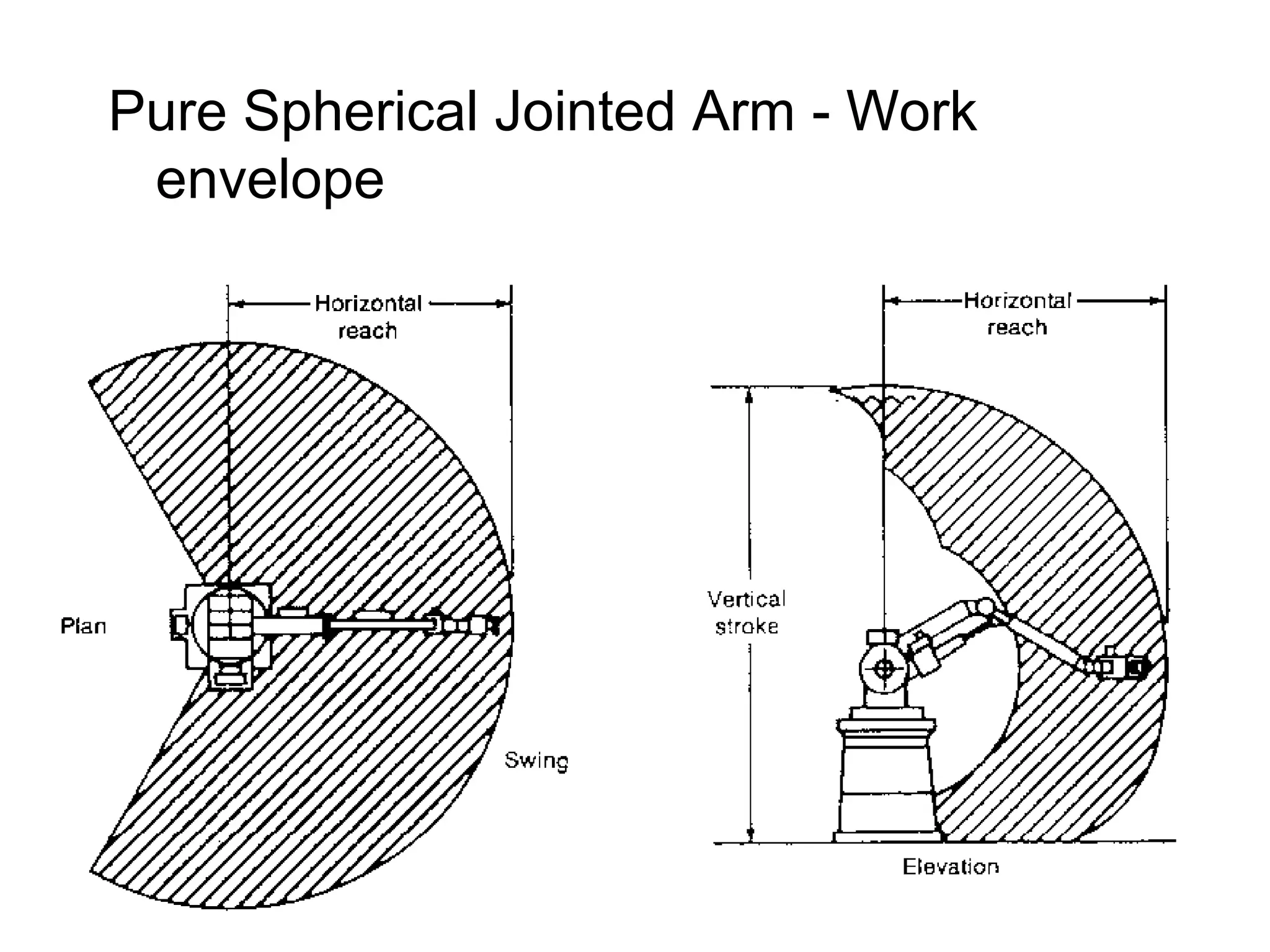
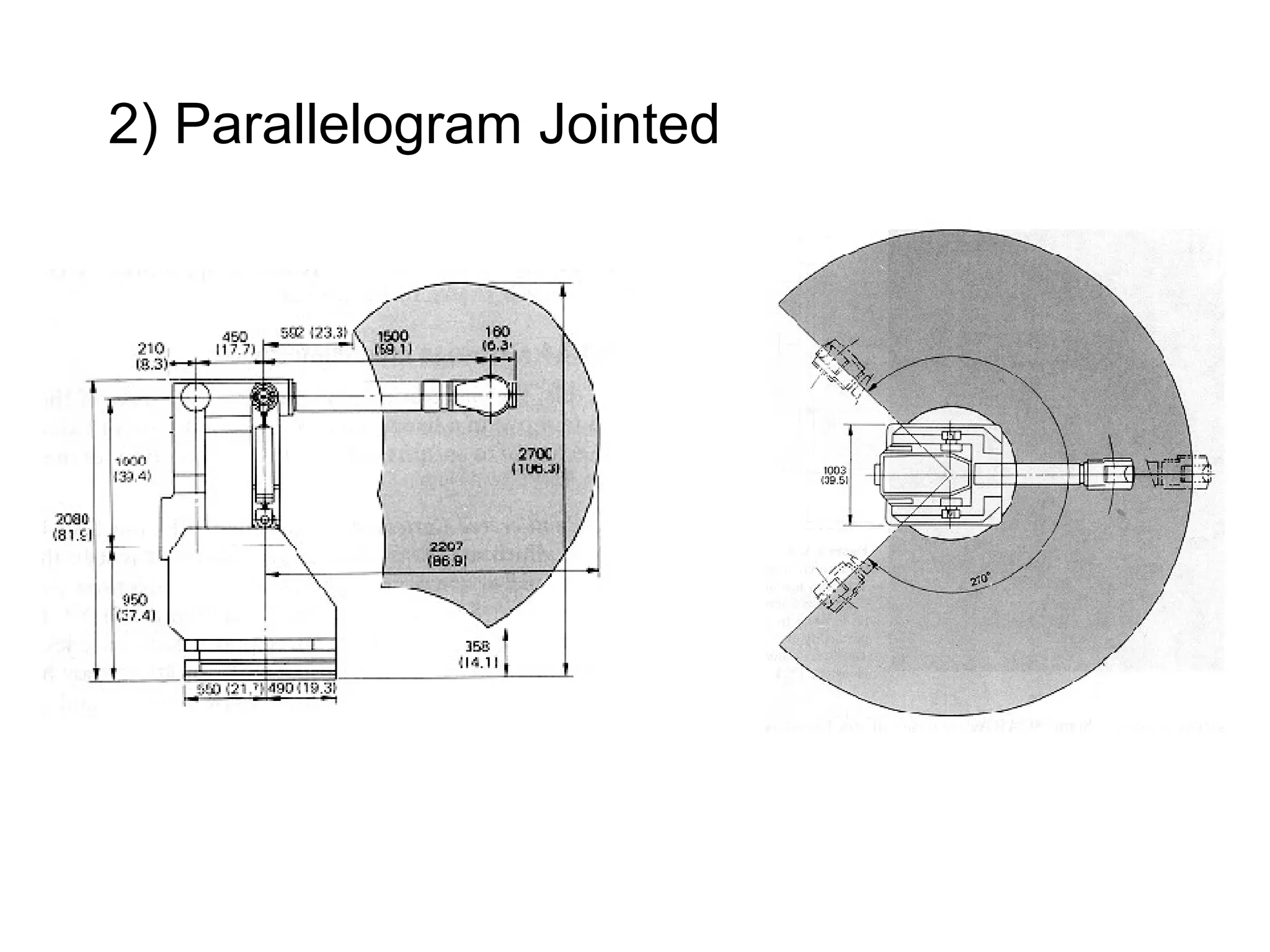















1. The document introduces industrial robots, including their classification, components, reference frames, work volumes, and programming. 2. Robots are re-programmable manipulators that can move parts and tools through variable programmed motion to perform tasks. 3. Common robot configurations include Cartesian, cylindrical, spherical, articulated, and SCARA robots. Reference frames and work volumes depend on the robot's configuration and reach.















![PLC Ladder Programming [Mechatronics]](https://cdn.slidesharecdn.com/ss_thumbnails/plc-ppt-snteli-200503070616-thumbnail.jpg?width=640&height=640&fit=bounds)