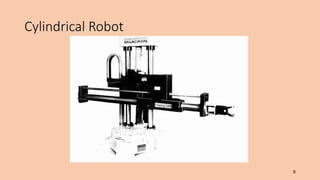
Industrial robots have been used in manufacturing since the 1950s. They are programmable devices that use manipulators to perform manufacturing tasks like welding and assembly. The manipulator consists of joints and links that position an end effector, typically a gripper. Robots are programmed using manual teaching, lead-through, or programming languages. Common applications include material handling, painting, welding, and inspection. While robots increase productivity and safety, they also displace some human labor.