Downloaded 245 times
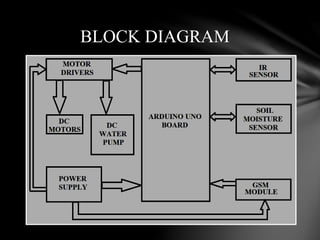
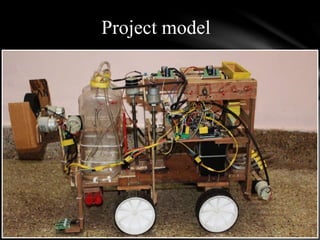
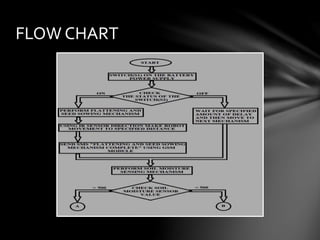
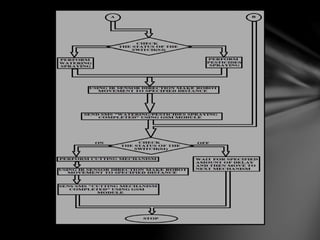


This document describes a robotic irrigation system developed using Arduino. The system is capable of flattening land, sowing seeds, watering crops based on soil moisture, spraying fertilizer, and cutting crops. It uses sensors, motors controlled by an Arduino board, and notifies the farmer of tasks done using GSM. The system aims to save farmer time, money and labor needs in agriculture.