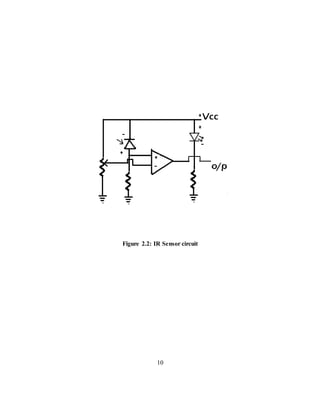
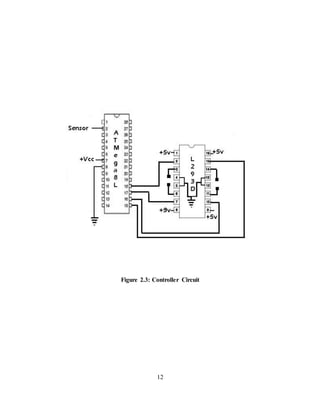
The document describes an object follower robot project created by four students. The robot uses infrared sensors and a microcontroller to detect and avoid obstacles. It has two motors connected to an L293D driver IC to control movement. The project involves designing printed circuit boards for the sensor and controller circuits and integrating the components. The robot is able to autonomously navigate an area while following and avoiding objects.