Downloaded 559 times


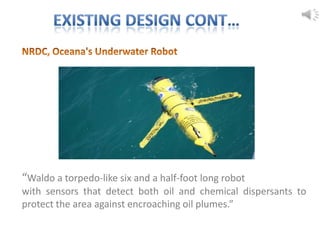

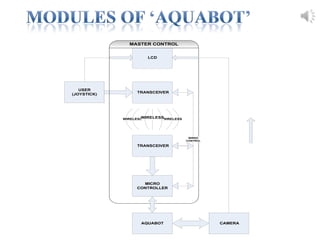
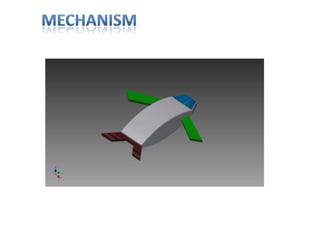

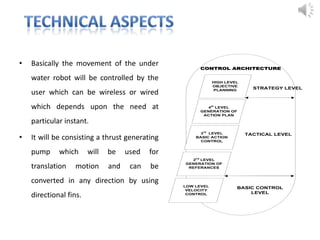
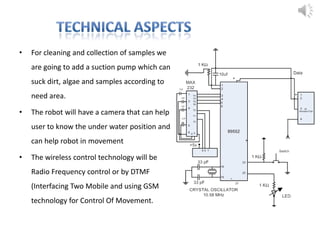


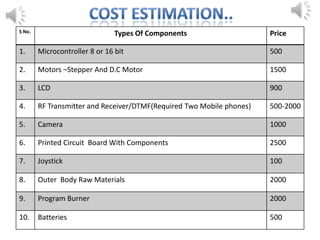



The document describes a proposed design for an underwater robot called Aquabot. It lists potential applications including collecting underwater samples, detecting gases, and monitoring wildlife. The design is adaptive, incorporating features from existing robots like hovering and detecting oil. Key features of Aquabot include a streamlined shape, fins for maneuvering, a camera for viewing up to 3 feet, and capacity for additional processing units. It will be remotely controlled via wireless technology and a joystick. The structure uses thrust from a pump for translation and directional fins for steering. The team estimates costs to be around $5,000 and provides a list of the main components.




















































![EDAI_Sem_2_End_Sem_Reviewvxvcvxcvxc[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/edaisem2endsemreview1-250629165410-5255e29b-thumbnail.jpg?width=640&height=640&fit=bounds)














































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)



