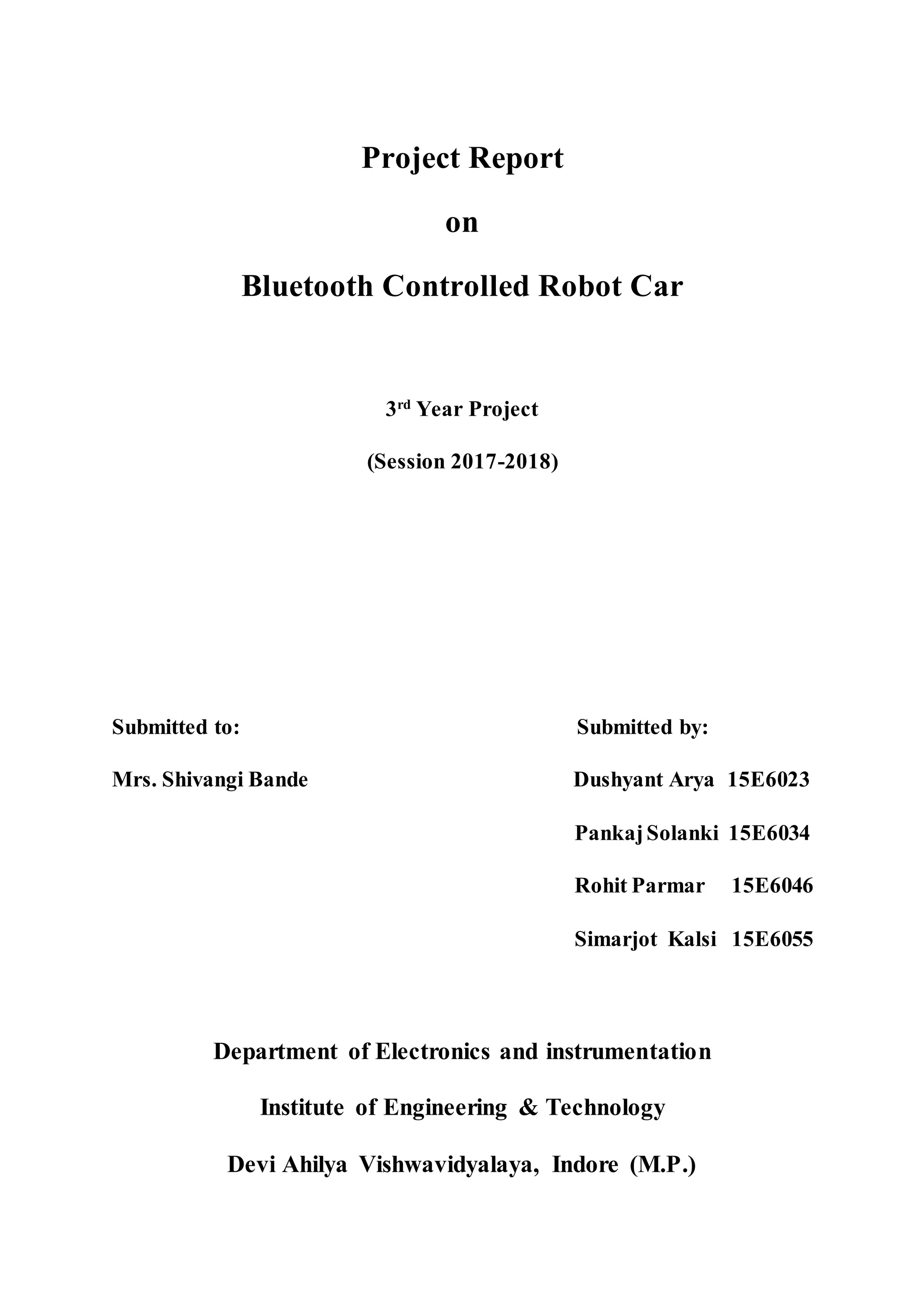
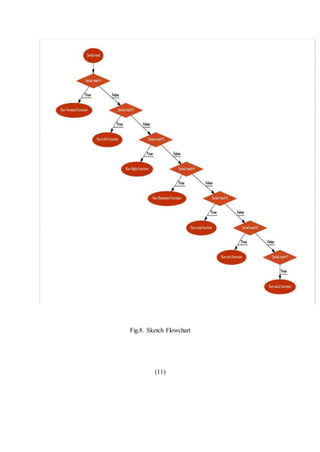
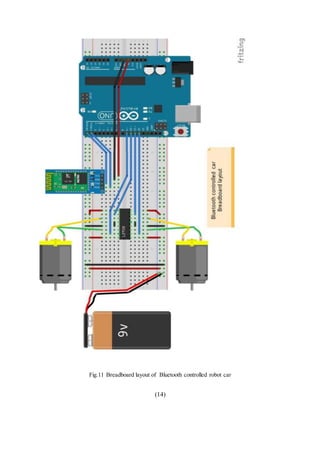
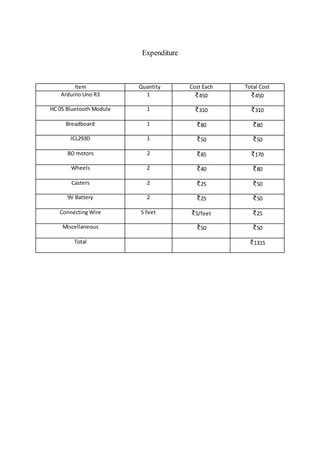
This document provides a project report on a Bluetooth controlled robot car. The project uses an Arduino Uno microcontroller, HC-05 Bluetooth module, L293D motor driver, and two DC motors to build a robot car that can be controlled remotely via a Bluetooth connected Android device running a control application. The report describes the hardware and software design and implementation, including connecting the Bluetooth module to the Arduino, sending control commands from the app to drive the motors via the motor driver, and a flowchart of the Arduino sketch logic. The total cost of components for the project was around 1315 INR. The conclusion states that the project demonstrated using Arduino and Bluetooth to remotely control devices like lights and appliances via a smartphone.















![Source code
#define m11 11 // rear motor
#define m12 12
#define m21 10 // front motor
#define m22 9
char str[2],i;
void axis()
{
digitalWrite(m11, LOW);
digitalWrite(m12, HIGH);
digitalWrite(m21, HIGH);
digitalWrite(m22, LOW);
}
void axis2()
{
digitalWrite(m11, HIGH);
digitalWrite(m12, LOW);
digitalWrite(m21, LOW);
digitalWrite(m22, HIGH);
}
void forward()
{
digitalWrite(m11, HIGH);
digitalWrite(m12, LOW);
digitalWrite(m21, HIGH);
digitalWrite(m22, LOW);
}
void backward()
{
digitalWrite(m11, LOW);
digitalWrite(m12, HIGH);
digitalWrite(m21, LOW);
digitalWrite(m22, HIGH);
}
void left()
{
digitalWrite(m11, LOW);
digitalWrite(m12, LOW);
delay(100);
digitalWrite(m21, HIGH);
digitalWrite(m22, LOW);
}
void right()
{
digitalWrite(m11, HIGH);
(17)](https://image.slidesharecdn.com/roughdraft-180525151827/85/Bluetooth-Controlled-Robot-Project-Report-21-320.jpg)
![digitalWrite(m12, LOW);
delay(100);
digitalWrite(m21, LOW);
digitalWrite(m22, LOW);
}
void Stop()
{
digitalWrite(m11, LOW);
digitalWrite(m12, LOW);
digitalWrite(m21, LOW);
digitalWrite(m22, LOW);
}
void setup()
{
Serial.begin(9600);
pinMode(m11, OUTPUT);
pinMode(m12, OUTPUT);
pinMode(m21, OUTPUT);
pinMode(m22, OUTPUT);
}
void loop()
{
while(Serial.available())
{
char ch=Serial.read();
str[i++]=ch;
if(str[i-1]=='1')
{
Serial.println("Forward");
forward();
i=0;
}
else if(str[i-1]=='2')
{
Serial.println("Left");
right();
i=0;
}
else if(str[i-1]=='3')
{
Serial.println("Right");
left();
i=0;
}
else if(str[i-1]=='4')
{
Serial.println("Backward");
(18)](https://image.slidesharecdn.com/roughdraft-180525151827/85/Bluetooth-Controlled-Robot-Project-Report-22-320.jpg)
![backward();
i=0;
}
else if(str[i-1]=='5')
{
Serial.println("Stop");
Stop();
i=0;
}
else if(str[i-1]=='6')
{
Serial.println("axis");
axis();
i=0;
}
else if(str[i-1]=='7')
{
Serial.println("axis2");
axis2();
i=0;
}
delay(100);
}
}
(19)](https://image.slidesharecdn.com/roughdraft-180525151827/85/Bluetooth-Controlled-Robot-Project-Report-23-320.jpg)

































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)
