Downloaded 188 times
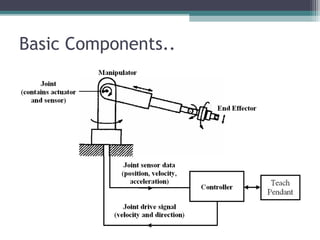
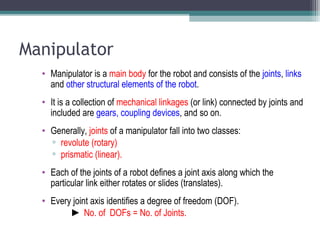
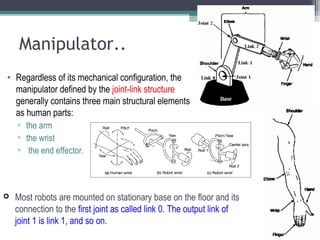
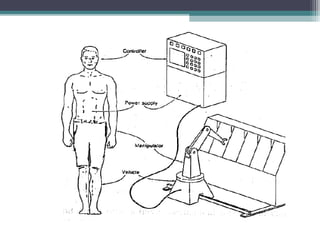
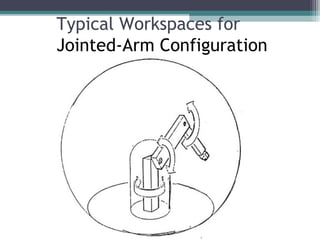
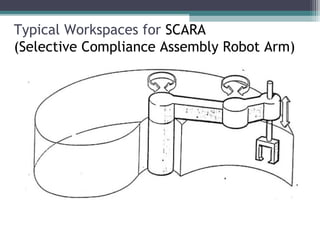


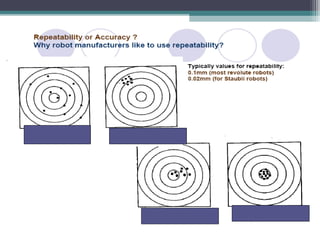

Industrial robots have six basic components: a manipulator, end effector, actuators, sensors, controller, and teach pendant. The manipulator consists of links and joints that give the robot its degrees of freedom. Actuators like electric motors provide movement. Sensors provide feedback and safety. The controller coordinates movement based on taught positions. Programming modes include teach, walk, and software modes. Key robot characteristics are payload, reach, precision, and repeatability. Safety systems use sensors to detect intrusions and stop robots to prevent harm.























































































