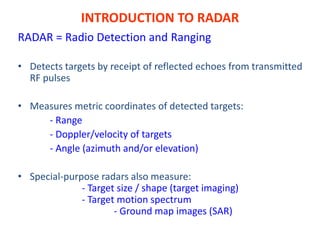
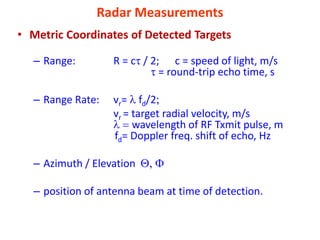
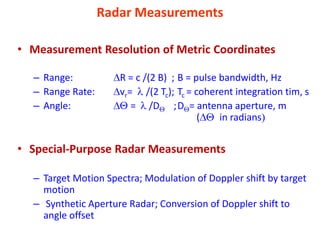
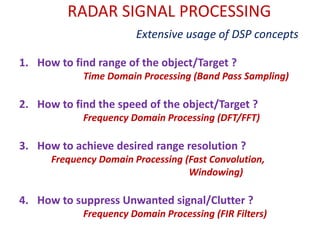
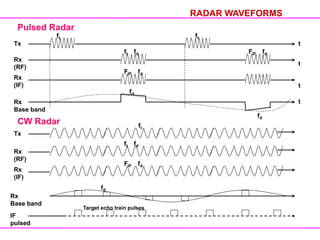
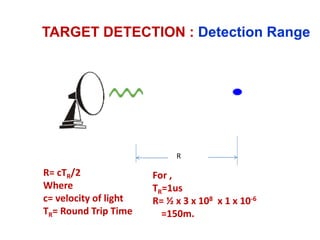
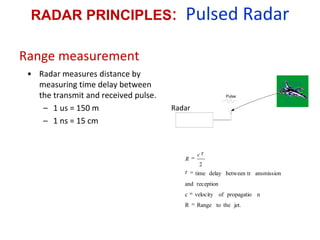
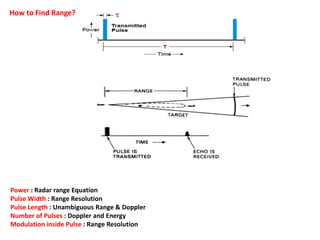
Radar uses radio waves to detect objects and determine their position, velocity, and other characteristics. It works by transmitting radio pulses and measuring the time delay and other properties of the returning echoes. Key radar measurements include range (determined from time delay), velocity (determined from Doppler shift), and angle (determined from antenna direction). Radar signals are processed extensively using digital signal processing concepts to extract target information from echo data in both the time and frequency domains. This allows radar to determine metrics like an object's range, velocity, and other critical data.



![Rmax proportional to [ PTG2 2 / (4 )3)Smin]
PT = Transmitted power
G = Gain of the antenna
= Wave length
= Target cross section
Smin = Minimum Detection signal
Rmax = [ PTAe2 /4 2 Smin] ¼
Ae = Antenna aperture
RADAR RANGE EQUATION](https://image.slidesharecdn.com/introduction-to-radar-lecture-1-material-230602103853-9b6e3a26/85/Introduction-to-Radar-Lecture-1-Material-pdf-17-320.jpg)








![FLIGHT INSPECTION of CNS FACILITIES [Compatibility Mode].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/flightinspectionofcnsfacilitiescompatibilitymode-230606130026-76dd62e0-thumbnail.jpg?width=640&height=640&fit=bounds)