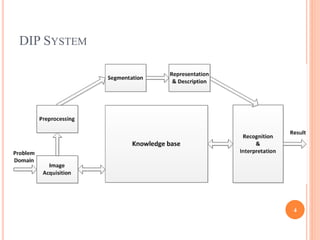
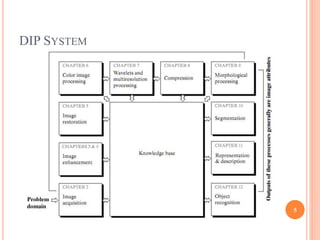
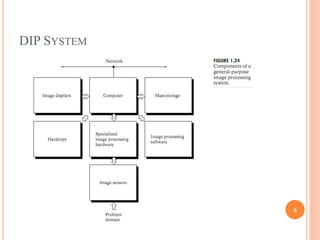
This document provides an overview of digital image processing. It discusses key topics including digital image fundamentals, image transforms, image enhancement, image restoration, image compression, image segmentation, representation and description, and recognition and interpretation. The document outlines concepts and techniques within each of these topics at a high level over multiple sections and pages with headings, content lists, and explanatory diagrams.



![BASIC INTENSITY FUNCTIONS
Spatial domain process
Image negatives:
intensity level in the range [0, L-1]
s = L – 1 – r
Log trans
s = c log(1 + r)
Power law (gramma) trans
s = c r
Piecewise-Linear Trans
Contrast stretching
Intensity level slicing
Bit plane slicing
18](https://image.slidesharecdn.com/ppt-imageprocessing-150707093525-lva1-app6891/85/Ppt-image-processing-18-320.jpg)





































































![Lect 1 Number systems and base conversions. [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/lect1numbersystemsandbaseconversions-260111134109-67c2d865-thumbnail.jpg?width=640&height=640&fit=bounds)
















