Download to read offline

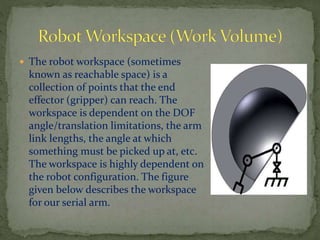
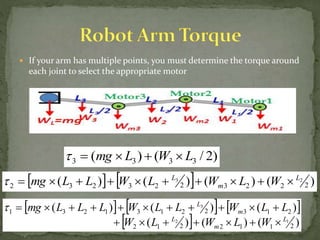
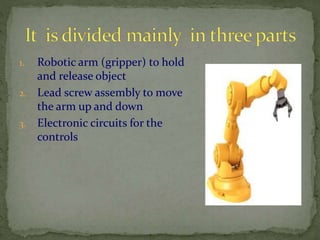
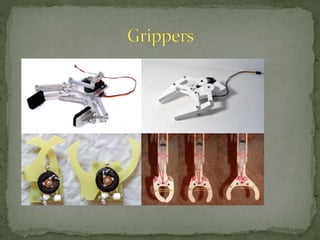
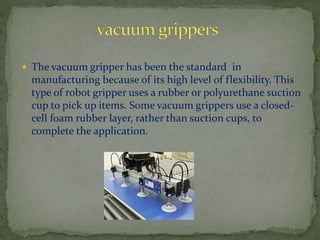
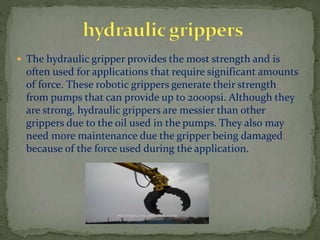
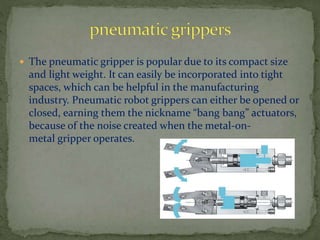
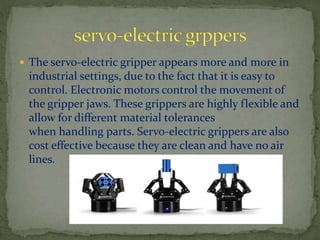
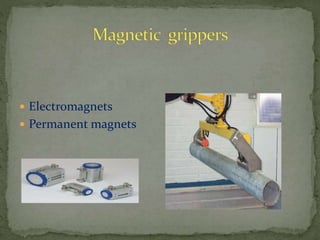
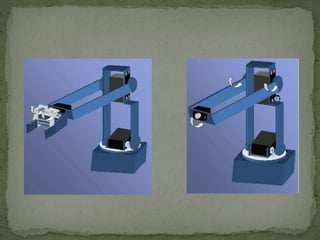


A robotic arm consists of linked segments connected by movable joints, similar to a human arm. The end of the kinematic chain that can grip or otherwise interact with its environment is called the end effector. The range of reachable positions for the end effector is defined as the robot's workspace. Proper selection of motors at each joint is important to ensure the arm can handle expected torques without failing. Common types of robot grippers include vacuum, hydraulic, pneumatic, and magnetic options, each with strengths for different applications.