Download to read offline
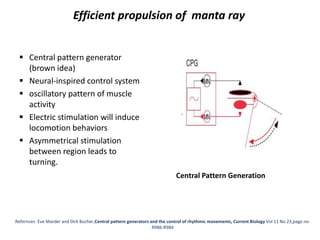
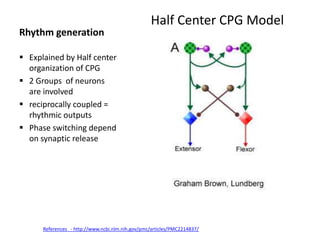
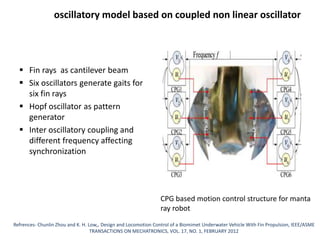

This document discusses the use of central pattern generators (CPGs) to model and control the propulsion of manta rays. It describes how CPGs generate oscillatory patterns of muscle activity through neural networks similar to half center models. Asymmetrical stimulation of CPG regions in a manta ray can induce turning behaviors. The document proposes using coupled nonlinear oscillators based on fin ray mechanics and Hopf oscillators to generate gaits for a manta ray robot controlled by a CPG-based motion structure.




























































