A real-time system must respond to external stimuli within a finite time period. The correctness of real-time computations depends on both logical results and timeliness. Real-time systems require substantial design effort to ensure task deadlines are met. There are two types of real-time systems: hard where missing deadlines causes damage, and soft where missing deadlines is undesirable. Scheduling algorithms like earliest deadline first (EDF) and rate monotonic analysis (RMA) are used to ensure tasks meet deadlines in real-time systems.
A Real TimeSystem is any information
processing system which has to respond to
externally generated input stimuli within a
finite & specified period.
In real time computing , the correctness of
the computation depends not only on the
logical results but also on the time at
which the results are produced.
3.
In RTS asubstantial
fraction of the design
effort goes into
making sure that the
task deadlines are
met.
A Deadline is a
given time after a
triggering event , by
which a response has
to be completed.
Hard Real TimeSystems
System should meets the timings constraints.
Response time overrun leads to disastrous
damage
Example : Flight Control System
SOFT REAL TIME SYSTEMS
Deadline overruns are tolerable, but not
desired.
There are no catastrophic consequences of
missing one or more deadlines.
Example : Multimedia System
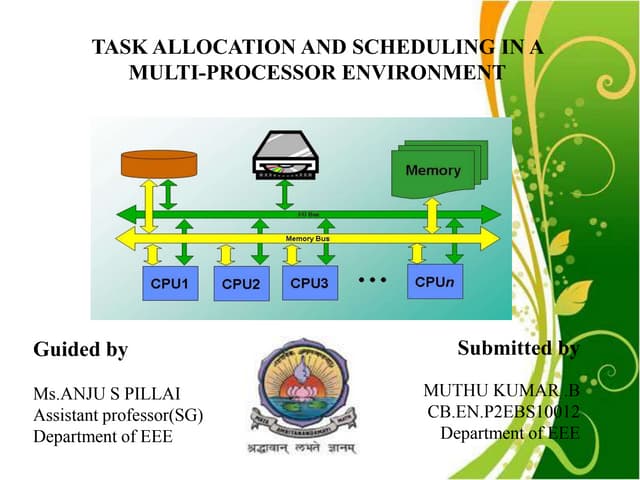
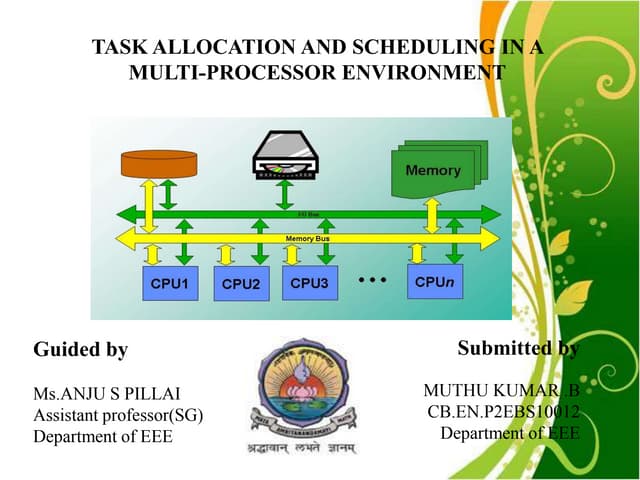
By task scheduling , we means that a computer’s
resources must be shared out equitably among the
users.
In general-purpose system , Round robin scheduling
is used , which ensures that user does not get a
disproportionate share of the computer’s services.
But Round robin scheduling approach does not
work in Real Time applications because priority
scheduling makes the difference in the two.
A1. No taskhas any non- preempt able section & cost of
preemption is negligible.
A2. Only processing requirements are significant;
memory, I/O & other resource requirements are
negligible.
A3. All tasks are independent.
A4. The deadline of a task is equal to its period.
A5. All the tasks in the task set are periodic.
10.
Optimal uniprocessor algorithm
Also known as Deadline Monotonic
Scheduling algorithm
Tasks are preemptable
Dynamic priorities
Scheduler picks task , whose deadline is
due next
A set of tasks is schedulable ( in hard
real time sense ) , if the total processor
utilization is not greater than 1.
11.
NECESSARY & SUFFICIENT
CONDITION
In EDF , for a task set is said to be
schedulable is if it satisfy the following
necessary and sufficient condition :
Σ (i=1 to n) e/p ≤ 1
i i
12.
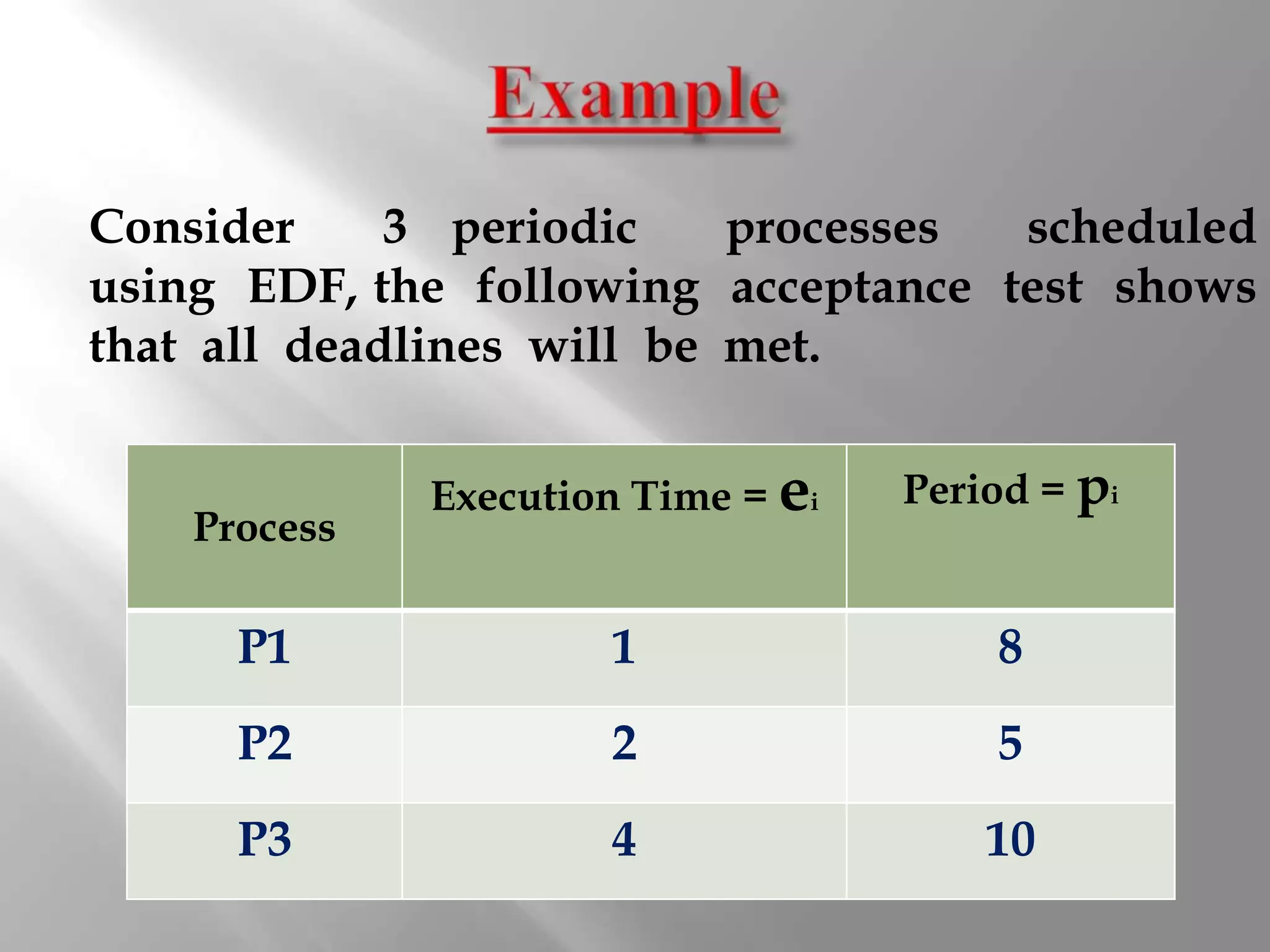
Consider 3 periodic processes scheduled
using EDF, the following acceptance test shows
that all deadlines will be met.
Execution Time = ei Period = pi
Process
P1 1 8
P2 2 5
P3 4 10
13.
The utilization willbe:
U = { ( 1/8 ) + ( 2/5 ) + ( 4/10 ) }
= 0.925 ( or 92.5 % )
The theoretical limit for any number of
processes is 100% ( or less than 1 ) and
so the system is schedulable .
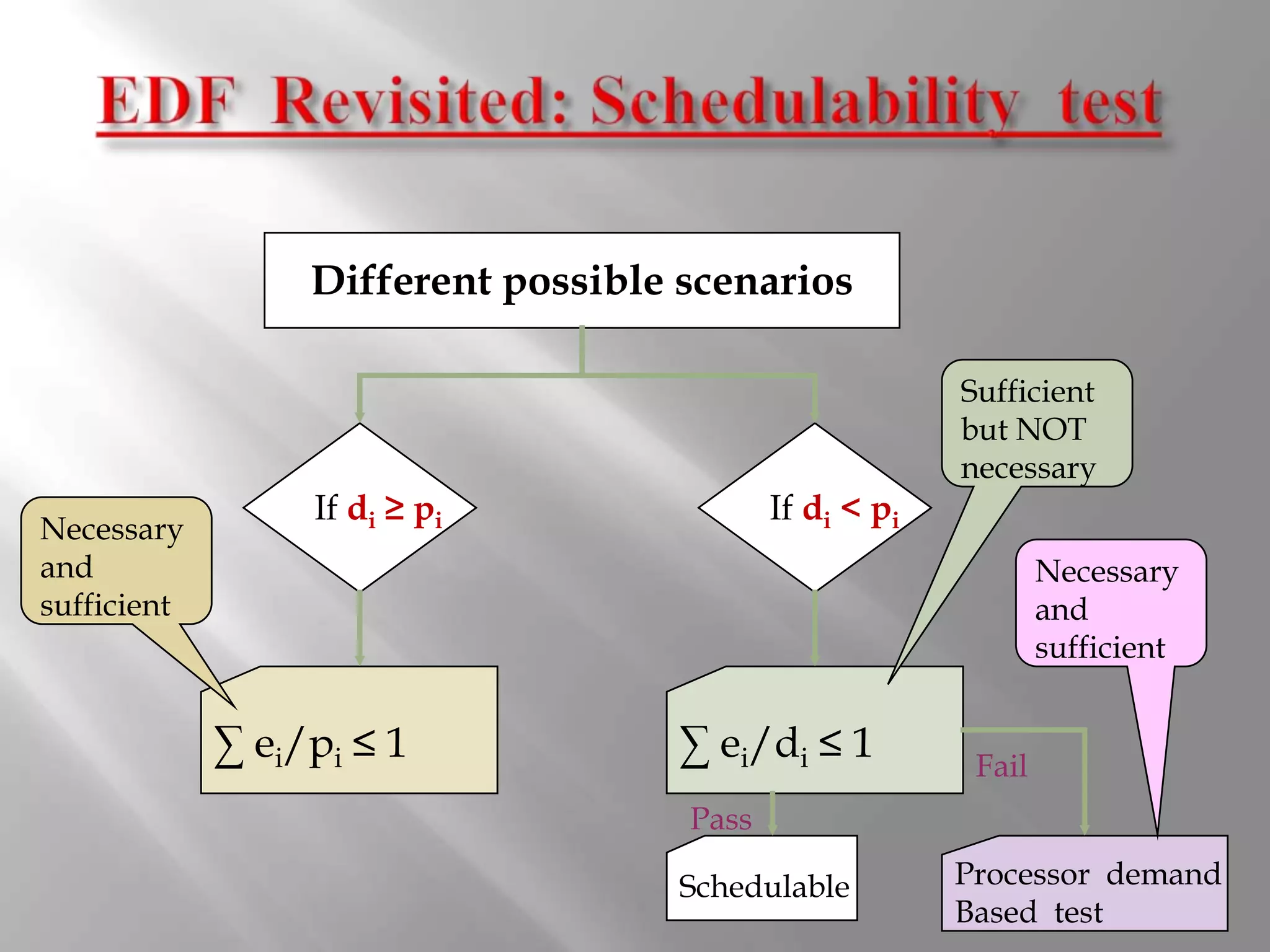
14.
Different possible scenarios
Sufficient
but NOT
necessary
If di ≥ pi If di < pi
Necessary
and Necessary
sufficient and
sufficient
∑ ei/pi ≤ 1 ∑ ei/di ≤ 1 Fail
Pass
Schedulable Processor demand
Based test
15.
•Optimality
ADVANTAGES •Reduces number of task
switches
•Deteriorates badly under
overload
DRAWBACKS •Scheduling is more
expensive
•Needs smarter scheduler
16.
Static priority based algorithm : tasks
scheduled according to priorities
Classical uniprocessor scheduling
algorithm
Also called Liu-Layland algorithm or Clock
driven uniprocessor algorithm
Tasks are pre-emptable
17.
It says that if the total utilization of the task
is not greater than n(21/n -1) where n stands
for number of tasks to be scheduled then
RM algorithm will schedule all the task to
meet their respective deadlines.
The RMA assigns priorities to the tasks
based on their rate of occurrence, i.e. the
lower the occurrence rate of the task the
lower the priority assigned to it.
18.
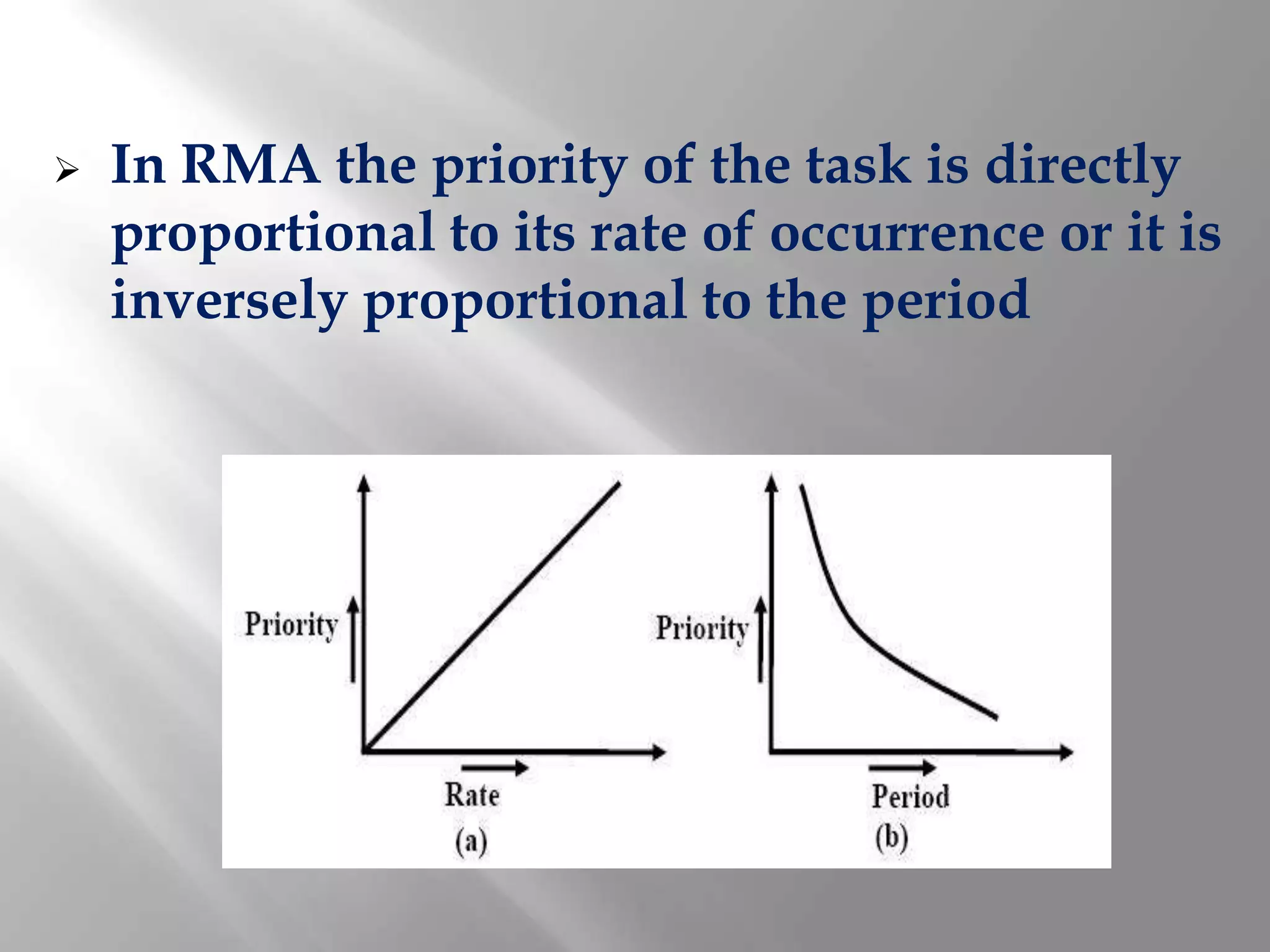
In RMA the priority of the task is directly
proportional to its rate of occurrence or it is
inversely proportional to the period
19.
A set of periodic real time tasks would not be
RMA schedulable unless they satisfy the
following necessary condition:-
Σ (i=1 to n) U =Σ
i (i=1 to n) e /p ≤ 1
i i
20.
Also referred to as Liu and Layland’s condition.
It implies that a set of ‘n’ real time periodic tasks
are schedulable under RMA if :
Σ (i=1 to n) U ≤ n
i (21/n -1)
21.
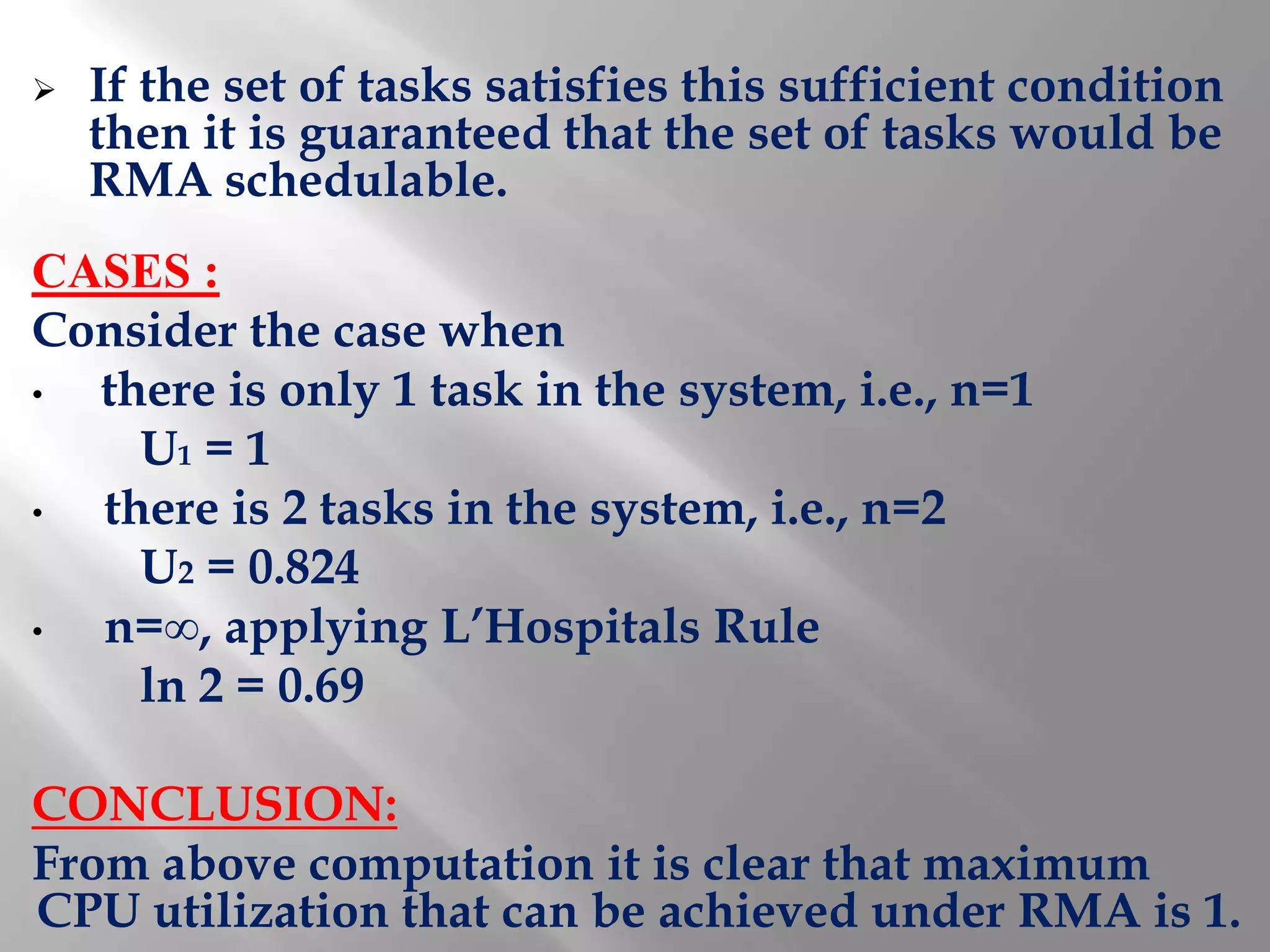
If the set of tasks satisfies this sufficient condition
then it is guaranteed that the set of tasks would be
RMA schedulable.
CASES :
Consider the case when
• there is only 1 task in the system, i.e., n=1
U1 = 1
• there is 2 tasks in the system, i.e., n=2
U2 = 0.824
• n=∞, applying L’Hospitals Rule
ln 2 = 0.69
CONCLUSION:
From above computation it is clear that maximum
CPU utilization that can be achieved under RMA is 1.
22.
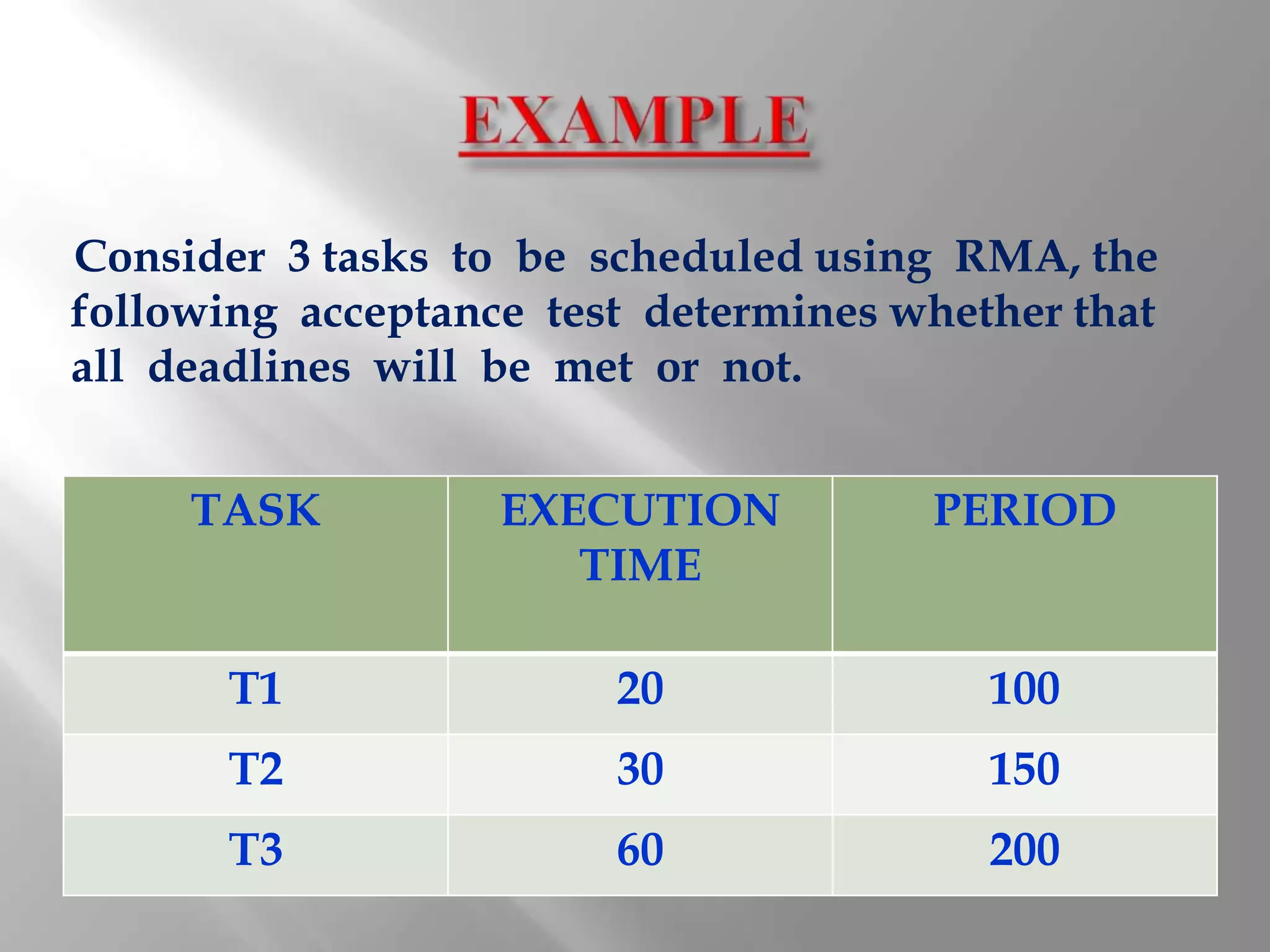
Consider 3 tasksto be scheduled using RMA, the
following acceptance test determines whether that
all deadlines will be met or not.
TASK EXECUTION PERIOD
TIME
T1 20 100
T2 30 150
T3 60 200
23.
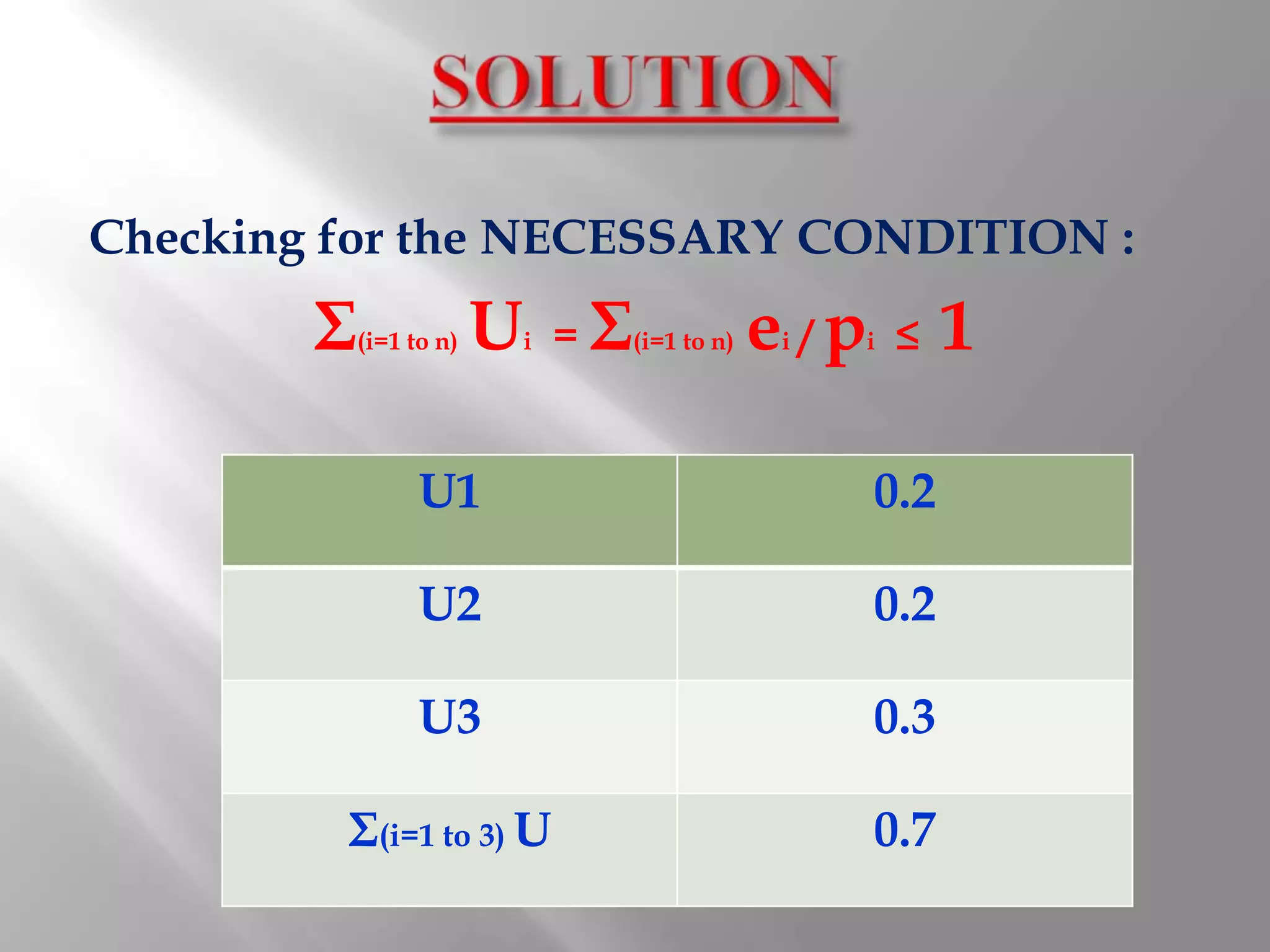
Checking for theNECESSARY CONDITION :
Σ(i=1 to n) U =Σ
i (i=1 to n) e /p
i i ≤ 1
U1 0.2
U2 0.2
U3 0.3
Σ(i=1 to 3) U 0.7
24.
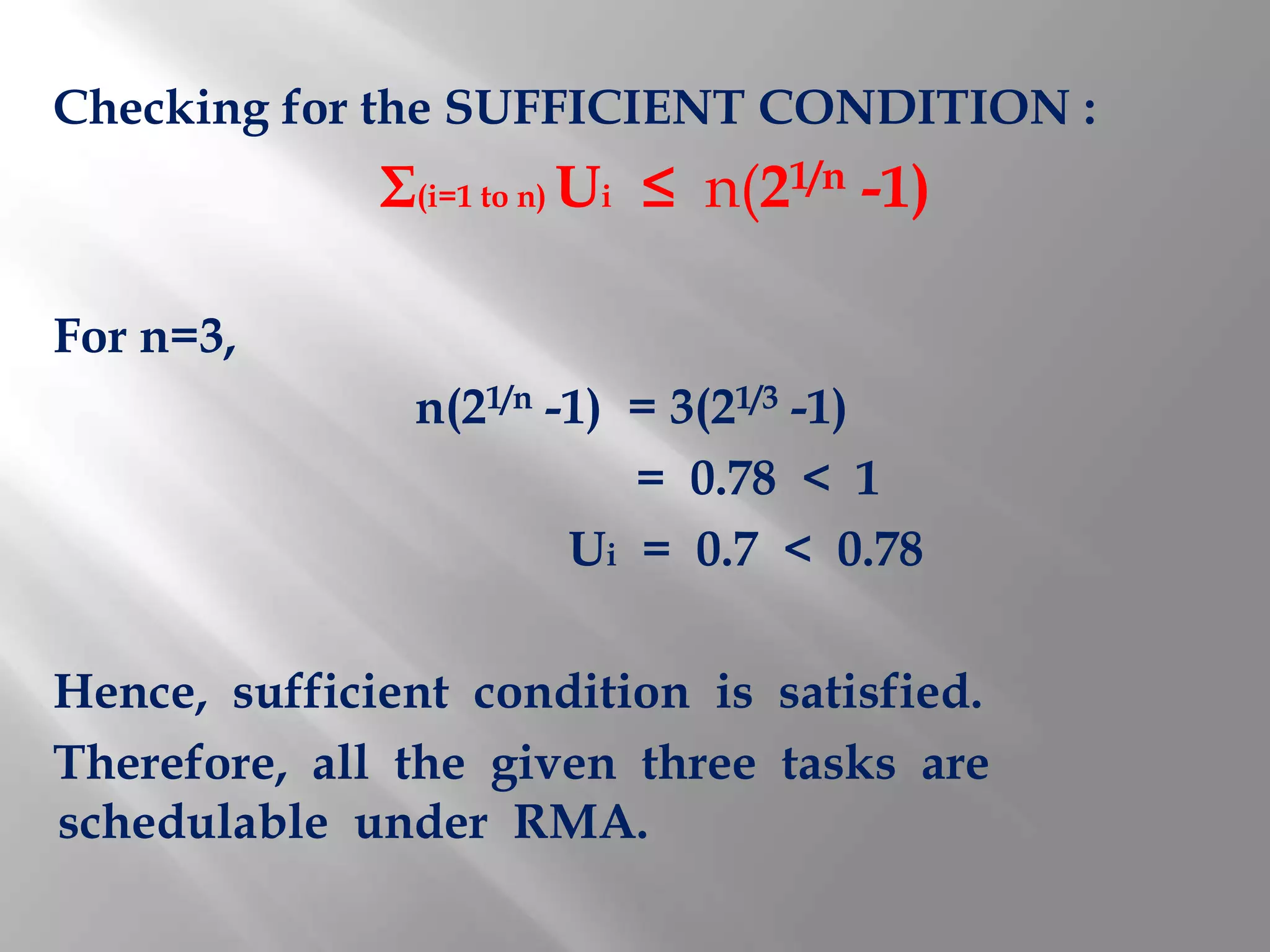
Checking for theSUFFICIENT CONDITION :
Σ(i=1 to n) Ui ≤ n(21/n -1)
For n=3,
n(21/n -1) = 3(21/3 -1)
= 0.78 < 1
Ui = 0.7 < 0.78
Hence, sufficient condition is satisfied.
Therefore, all the given three tasks are
schedulable under RMA.
25.
• possesses goodtransient
Advantages overload handling
• difficult to support
aperiodic and sporadic
tasks
Disadvantages
• not optimal when task
periods and deadlines
differ
26.
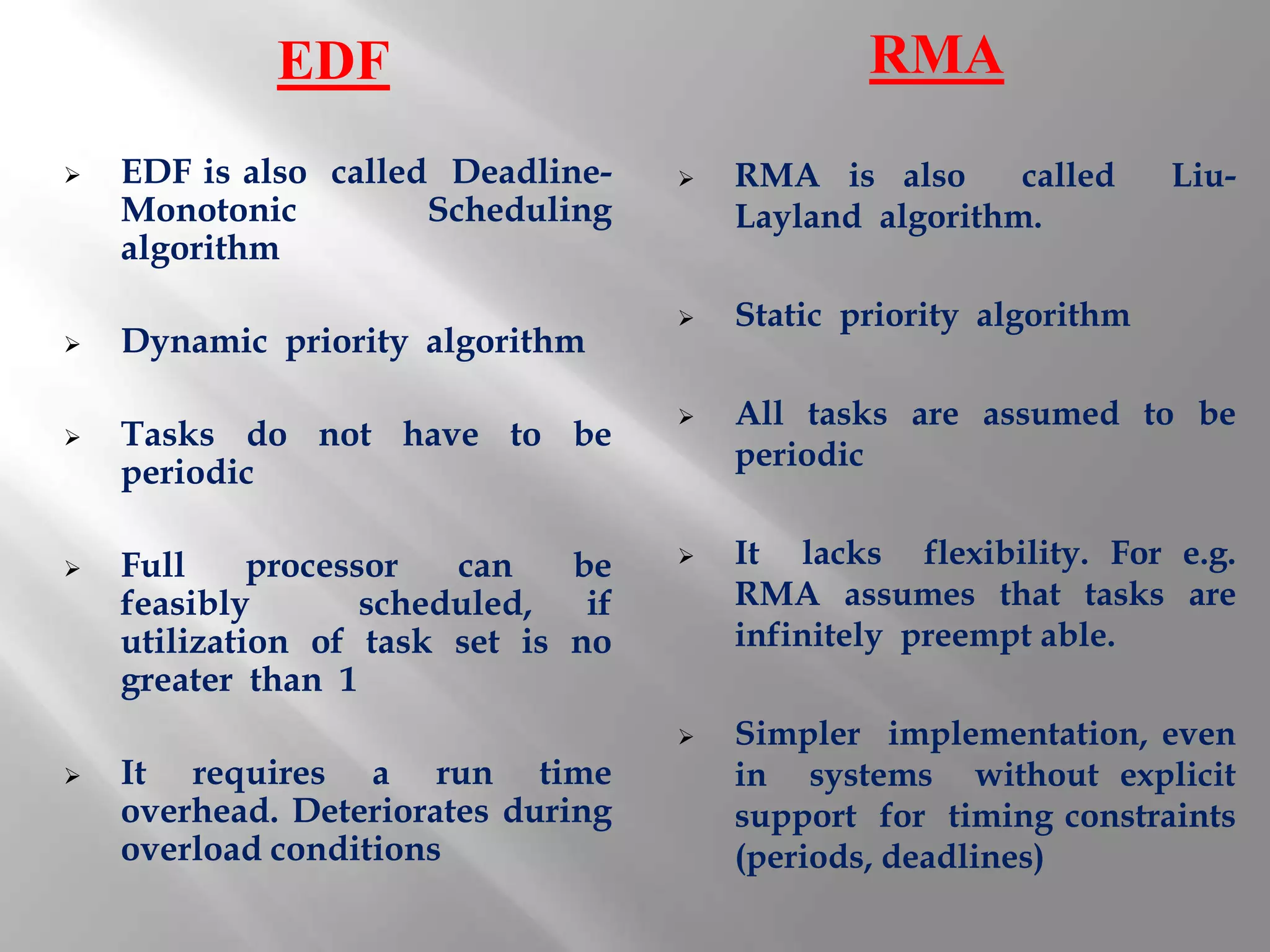
EDF RMA
EDF is also called Deadline- RMA is also called Liu-
Monotonic Scheduling Layland algorithm.
algorithm
Static priority algorithm
Dynamic priority algorithm
All tasks are assumed to be
Tasks do not have to be
periodic
periodic
Full processor can be It lacks flexibility. For e.g.
feasibly scheduled, if RMA assumes that tasks are
utilization of task set is no infinitely preempt able.
greater than 1
Simpler implementation, even
It requires a run time in systems without explicit
overhead. Deteriorates during support for timing constraints
overload conditions (periods, deadlines)











































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

















