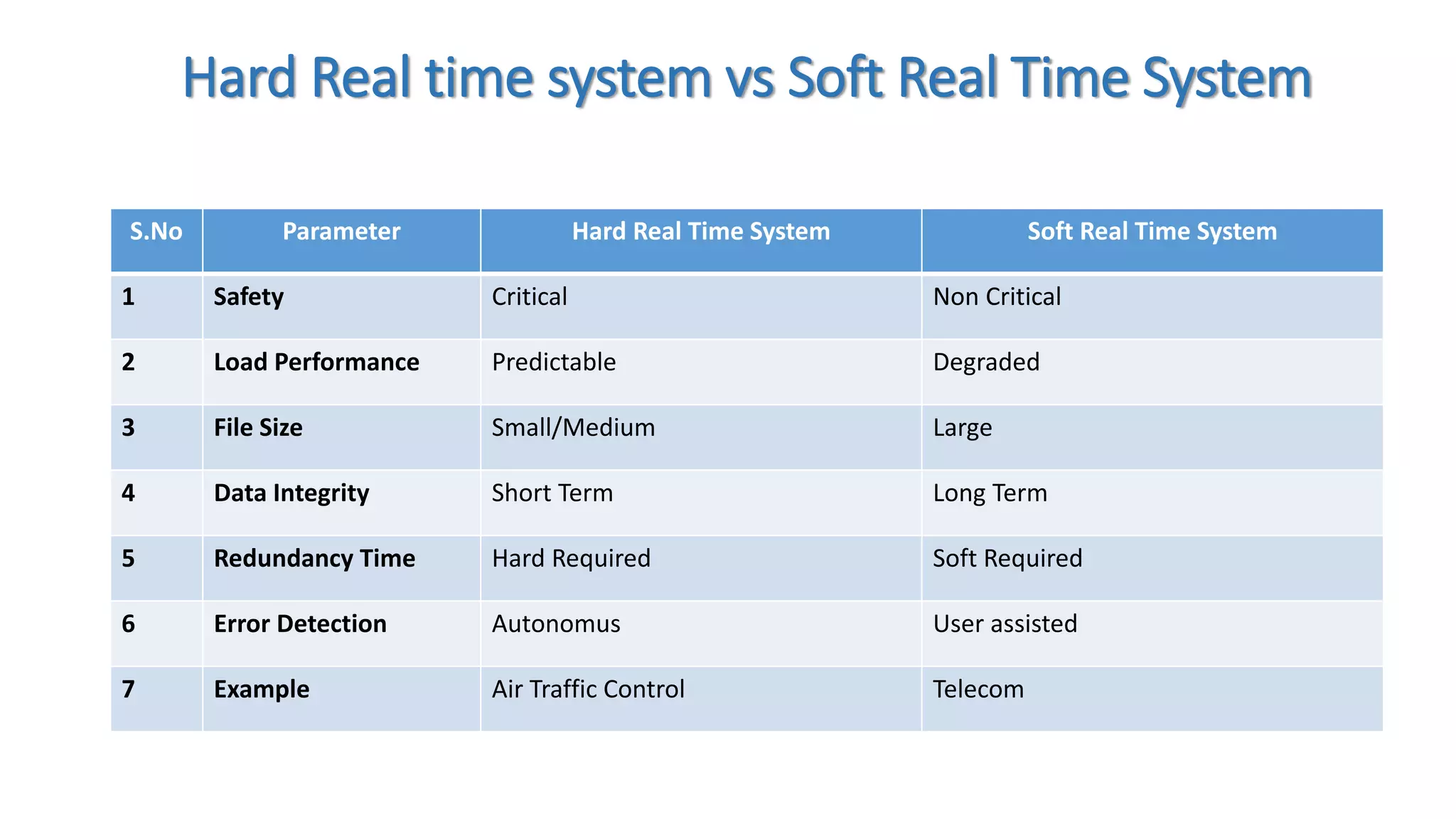
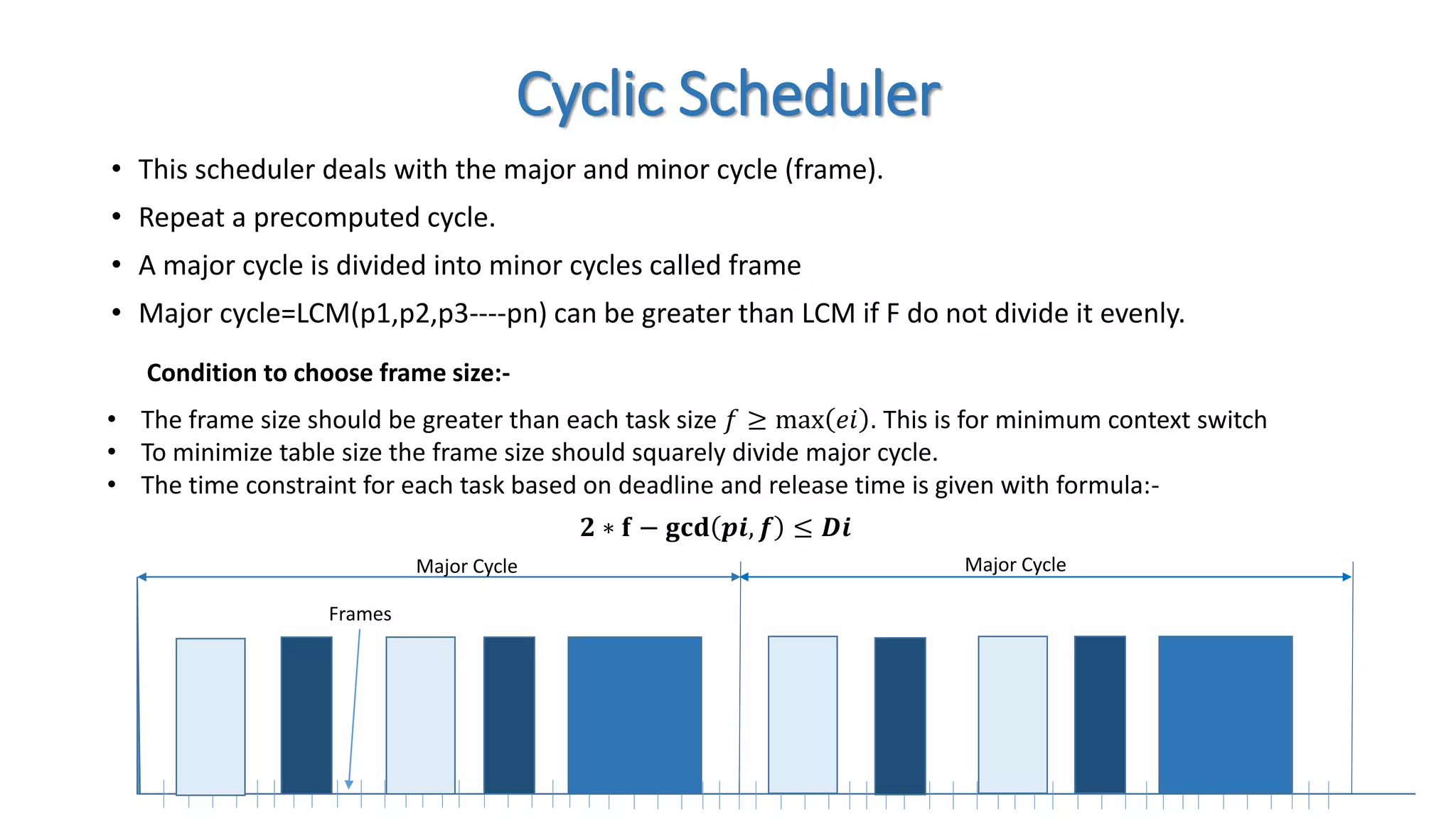
A real-time system operates under strict time constraints, where correctness relies on both logical results and timely execution. There are two main types of real-time systems: hard real-time, which is safety-critical, and soft real-time, which is not; each has distinct performance and reliability characteristics. The document also covers various scheduling techniques, including static and dynamic algorithms, to manage task execution in real-time computing environments.