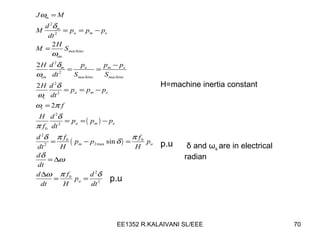
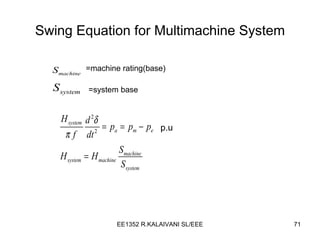
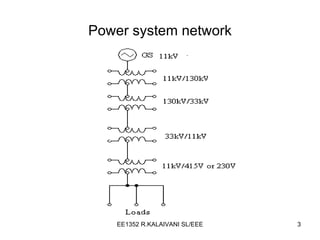
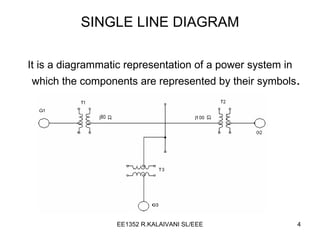
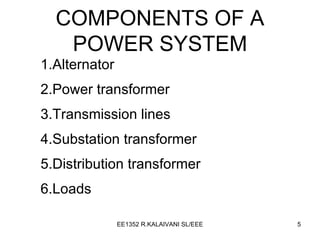
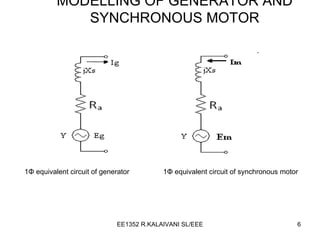
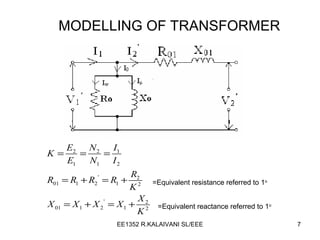
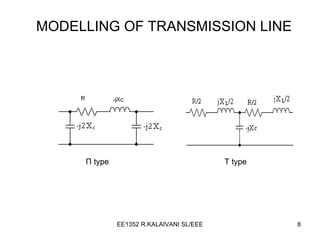
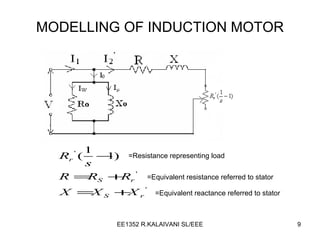
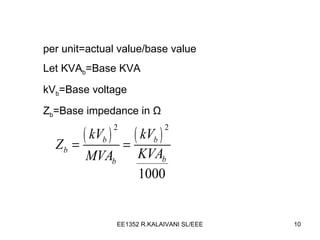
The document provides an overview of power system analysis and modeling. It discusses modeling of various power system components like generators, transformers, transmission lines, and induction motors using equivalent circuits. It also covers per unit calculations and formation of impedance and reactance diagrams from a single line diagram. The document further discusses power flow analysis using bus admittance matrix and different iterative methods. It covers balanced and unbalanced fault analysis using symmetrical components. It concludes with discussing power system stability including steady state, transient, and voltage stability.
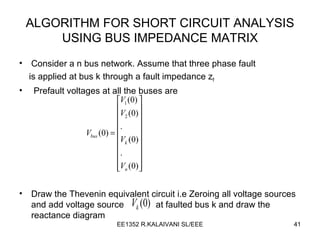
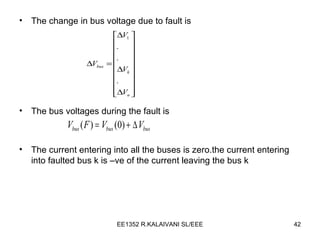
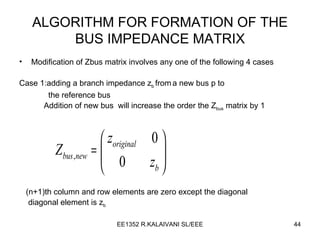
![SINGULAR TRANSFORMATION METHOD Y BUS = Where [y]=primitive admittance A=bus incidence matrix](https://image.slidesharecdn.com/newtonraphson-090922215947-phpapp02/85/Newton-Raphson-24-320.jpg)