Downloaded 66 times

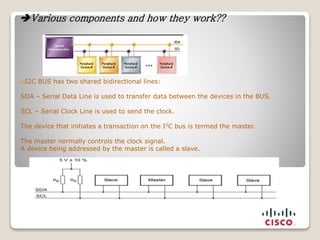







![I²C and SMBus Fault Codes
EBUSY --- Returned by SMBus adapters when the bus was busy for longer than allowed
EINVAL ---This rather vague error means an invalid parameter has been detected before any I/O
operation was started
ENODEV --- Returned by driver probe methods. This is a bit more specific than ENXIO, implying
the problem isn't with the address, but with the device found there
ENXIO --- Returned by I2C adapters to indicate that the address phase of a transfer didn't get
an ACK. While it might just mean an I2C device was temporarily not responding
ETIMEDOUT --- This is returned by drivers when an operation took too much time, and was
aborted before it completed.
EPROTO --- Returned when slave does not conform to the relevant I2C or SMBus (or chip-specific)
protocol specifications.
EOPNOTSUPP --- Returned by an adapter when asked to perform an operation that it doesn't, or
can't, support
my %errmap = (
-1 => ['EPERM', "Operation not permitted"],
-4 => ['EINTR', "Interrupted system call"],
-5 => ['EIO', "I/O error"],
-6 => ['ENXIO', "No such device or address"],
-11 => ['EAGAIN', "Try again"],
-12 => ['ENOMEM', "Out of memory"],
-16 => ['EBUSY', "Device or resource busy"], ("fan present but data not ready, returning -EBUSY");
-19 => ['ENODEV', "No such device"],
-22 => ['EINVAL', "Invalid argument"],
-110 => ['ETIMEDOUT', "Connection timed out"],
-512 => ['ERESTARTSYS', ""]](https://image.slidesharecdn.com/myi2c-150512144657-lva1-app6892/85/My-i2c-12-320.jpg)




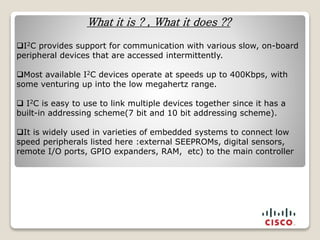
The document provides an overview of Inter-Integrated Circuit (I2C) communication in Cisco Unified Computing System (UCS) chassis. I2C is used to connect low-speed peripheral devices like fans, power supplies, and sensors to the chassis management controller. It describes the various I2C components in the UCS 5108 chassis, including multiplexers that divide the I2C bus into segments. Potential issues from I2C congestion are discussed, such as sensor reading failures and fans running at high speed. Methods for analyzing I2C activity via CLI commands and log files are presented. Suggested workarounds for I2C problems involve removing and reseating components while maintaining redundancy.