Downloaded 45 times
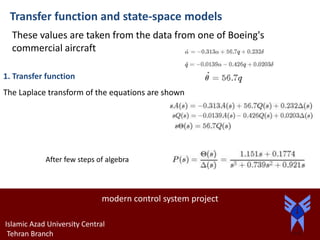
![2. State space
modern control system project
MATLAB representation
Continuous-time transfer function
Islamic Azad University Central
Tehran Branch
Continuous-time state-space model
s = tf('s');
P_pitch (1.151*s+0.1774)/(s^3+0.739*s^2+0.921*s
A = [-0.313 56.7 0; -0.0139 -0.426 0; 0 56.7 0];
B = [0.232; 0.0203; 0];
C = [0 0 1];
D = [0];
pitch_ss = ss(A,B,C,D)](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-5-320.jpg)
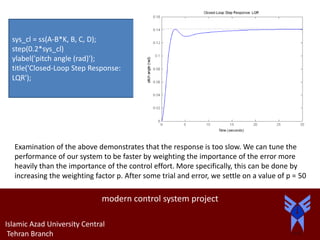
![Controllability
modern control system project
Islamic Azad University Central
Tehran Branch
For the system to be completely state controllable, the controllability matrix
Since our controllability matrix is 3x3, the rank of the matrix must be 3.
The MATLAB command rank can give you the rank of this matrix
A = [-0.313 56.7 0; -0.0139 -0.426 0; 0 56.7 0];
B = [0.232; 0.0203; 0];
C = [0 0 1];
D = [0];
co = ctrb(A,B);
Controllability = rank(co)
Controllability =
3
Therefore, our system is completely state controllable since the controllability matrix
has rank 3.](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-6-320.jpg)
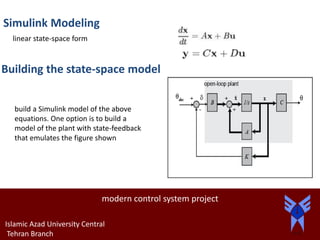
![Control design via pole placement
modern control system project
Islamic Azad University Central
Tehran Branch
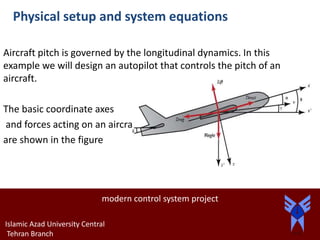
The schematic of a full-state feedback control system is shown below (with D = 0).
Based on the above, matrix A - BK
determines the closed-loop dynamics
of our system. Specfically, the roots of
the determinant of the matrix
[ sI - ( A - BK ) ] are the closed-loop
poles of the system. Since the
determinant of [ sI - ( A - BK ) ] is a
third-order polynomial, there are
three poles we can place and since
our system is completely state
controllable, we can place the poles
anywhere we like](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-7-320.jpg)
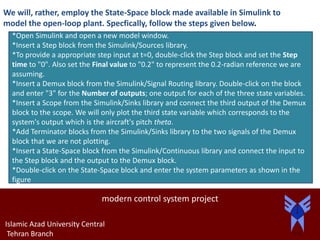
![Linear quadratic regulation
modern control system project
Islamic Azad University Central
Tehran Branch
We will use a technique called the Linear Quadratic Regulator (LQR) method to generate
the "best" gain matrix K, without explicitly choosing to place the closed-loop poles in
particular locations. This type of control technique optimally balances the system error and
the control effort based on a cost that the designer specifies that defines the relative
importance of minimizing errors and minimimizing control effort. In the case of the
regulator problem, it is assumed that the reference is zero
p = 2;
Q = p*C'*C
R = 1;
[K] = lqr(A,B,Q,R)
Q =
0 0 0
0 0 0
0 0 2
K =
-0.5034 52.8645 1.4142](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-8-320.jpg)
![modern control system project
Islamic Azad University Central
Tehran Branch
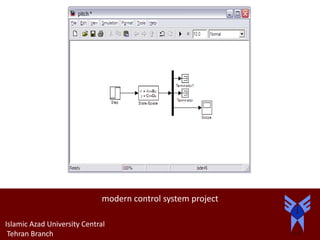
Modify the code of your m-file as follows and then run at the command
line to produce the following step response.
p = 50;
Q = p*C'*C;
R = 1;
[K] = lqr(A,B,Q,R)
sys_cl = ss(A-B*K, B, C, D);
step(0.2*sys_cl) ylabel('pitch angle (rad)');
title('Closed-Loop Step Response: LQR');
K =
-0.6435 169.6950 7.0711](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-10-320.jpg)

![modern control system project
Islamic Azad University Central
Tehran Branch
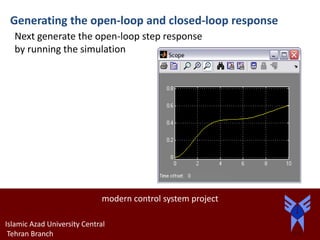
In the figure the C matrix is entered as a 3x3
identity matrix using the eye command rather
than [0 0 1] as given in the original state-space
equations. The reason for this is because in
state-feedback control it is assumed that all of
the state variables are measured, not just the
output. If this is not the case, then an observer
needs to be designed to estimate any state
variables that are not measured. Refer to the
State-Space Methods for Controller Design.
When finished, the completed model should
appear in the next figure](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-14-320.jpg)
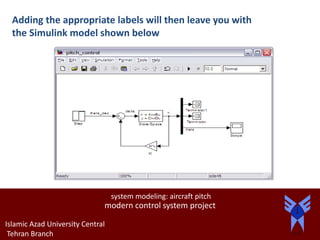
![This response is unstable and identical
to that obtained within MATLAB in the
Aircraft Pitch System Analysis page. In
order to view a stable response, we
will now quickly add the state-
feedback control gain K designed in
the Aircraft Pitch: State-Space
Methods for Controller Design page.
Recall that this gain was designed
using the Linear Quadratic Regulator
method and resulted in a calculation
of K = [-0.6435 169.6950 7.0711].
modern control system project
Islamic Azad University Central
Tehran Branch](https://image.slidesharecdn.com/moderncontrolsystem-170601142113/85/Modern-control-system-17-320.jpg)

This document describes modeling and control of aircraft pitch dynamics. It presents: 1) The longitudinal equations of motion and state-space models of an aircraft's pitch. 2) Analysis of the open-loop system and design of an LQR controller for stable response. 3) Simulink modeling of the open-loop and closed-loop aircraft pitch systems.