1) An LQR controller with feedforward control and steady state error tracking was designed and simulated to control an inverted pendulum system.
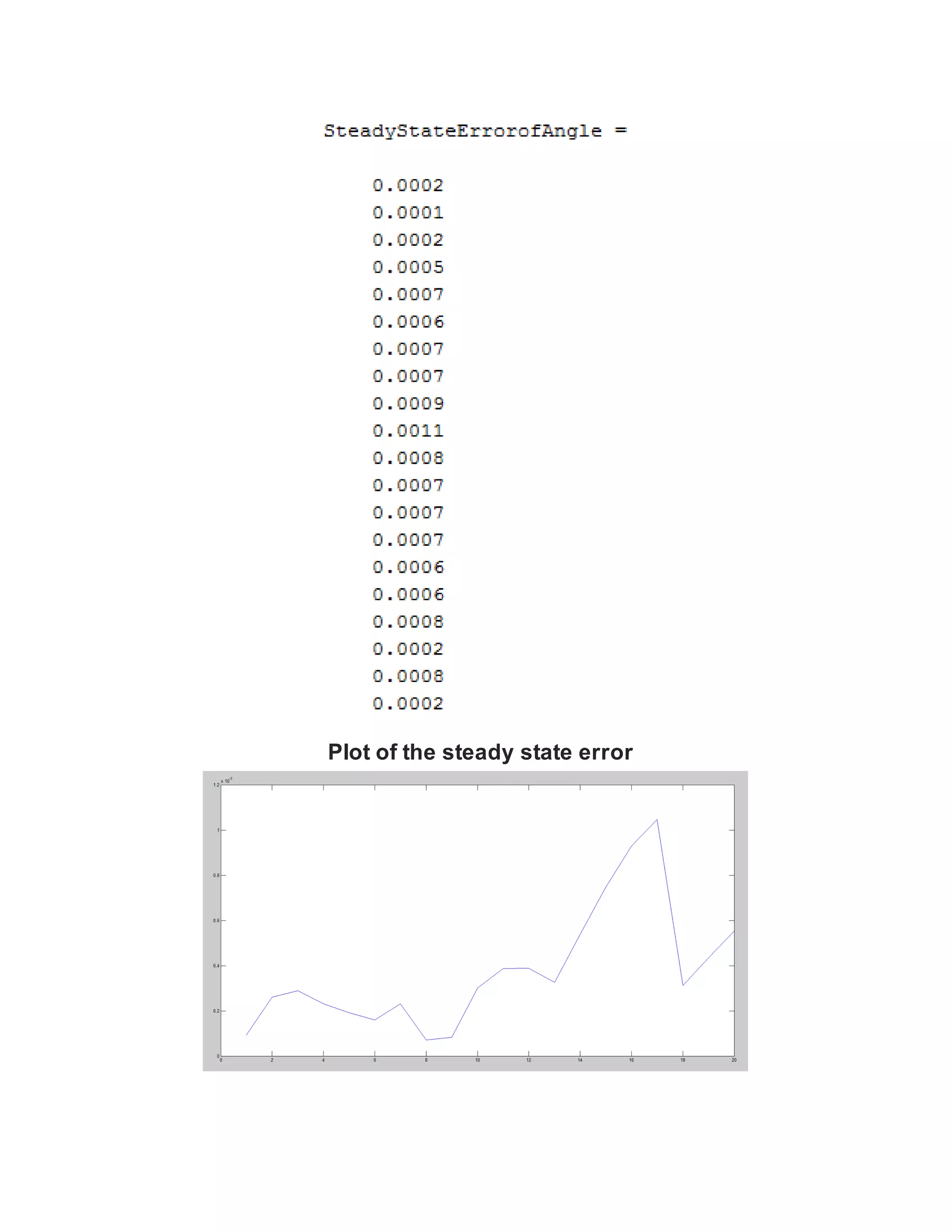
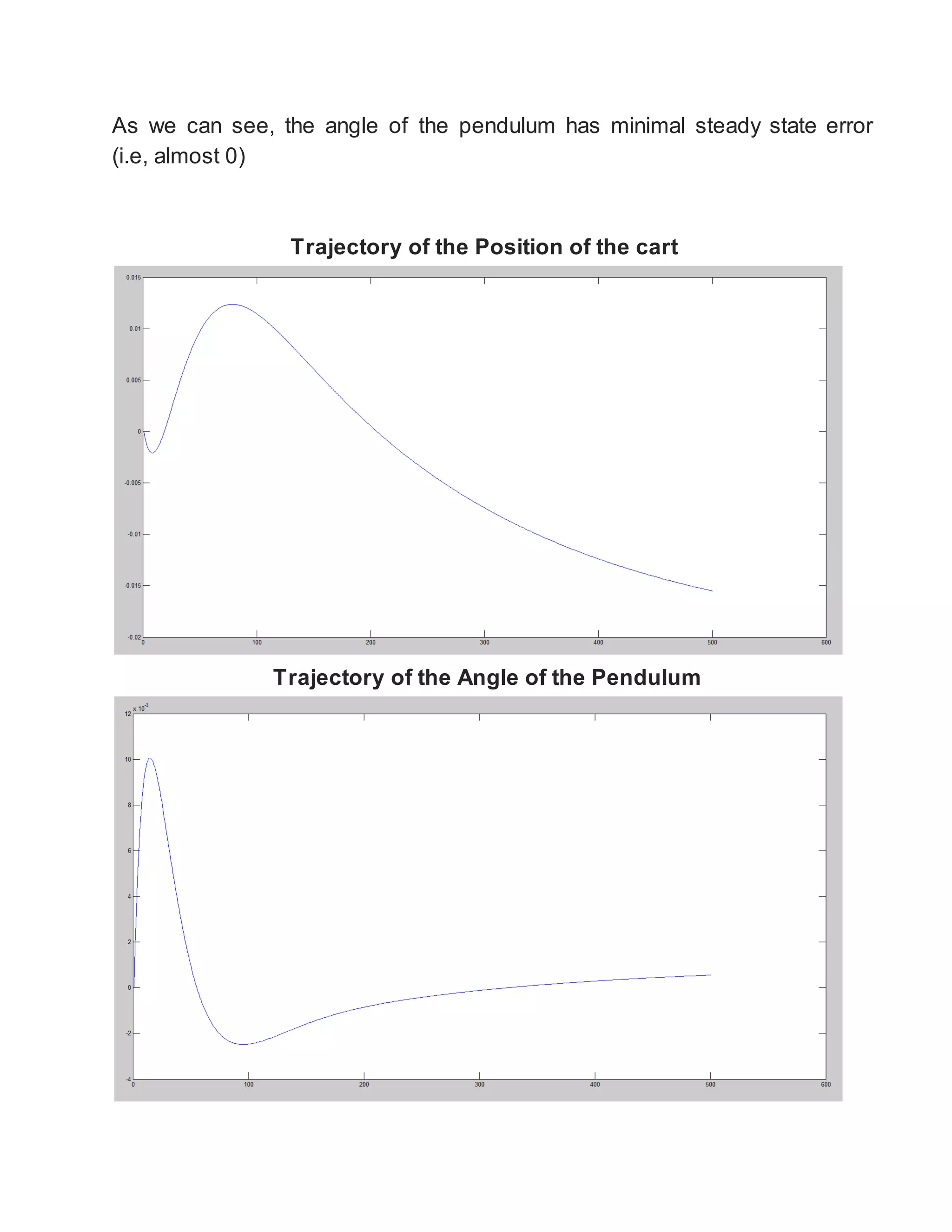
2) The LQR controller stabilized the unstable system and achieved good performance for the pendulum angle and cart position with minimal overshoot and steady state error.
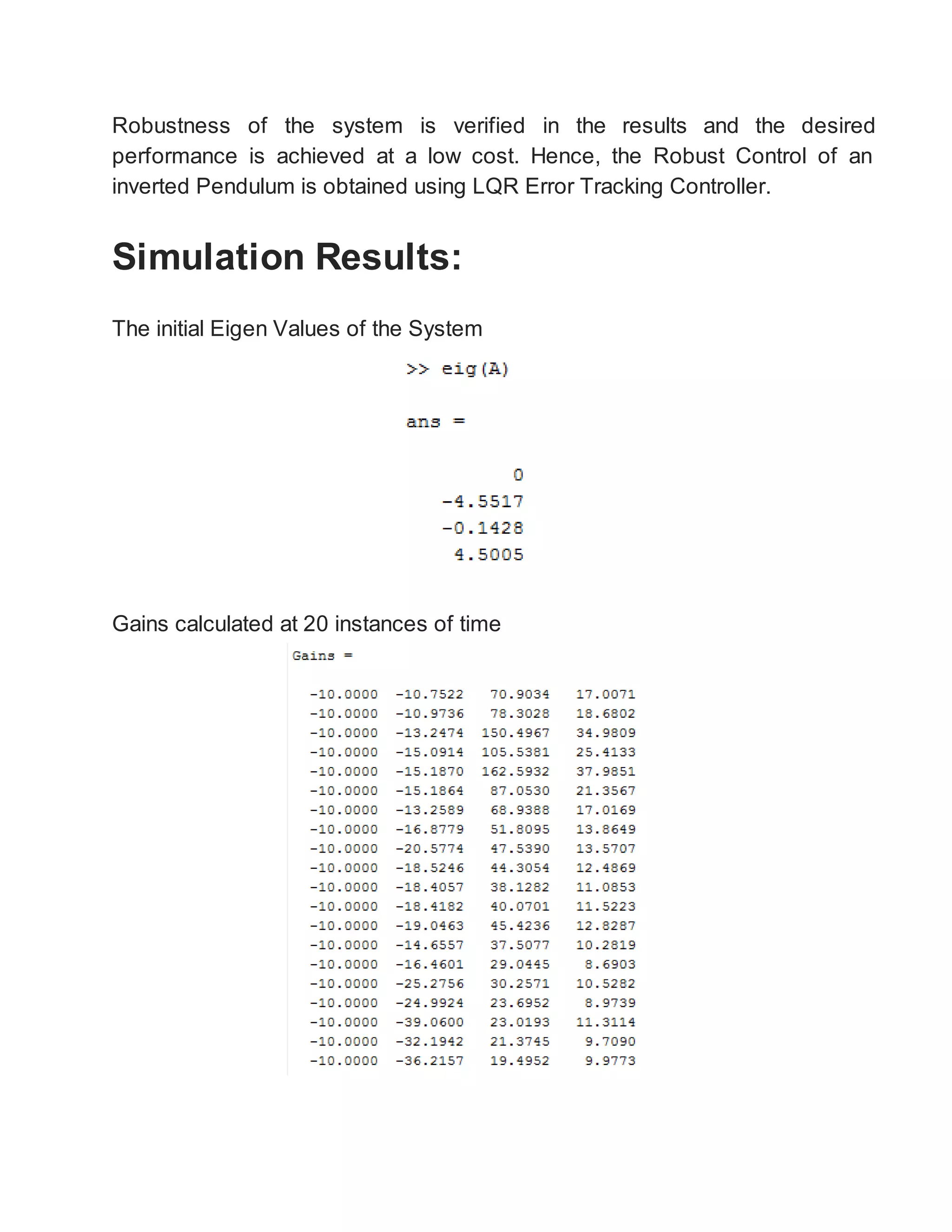
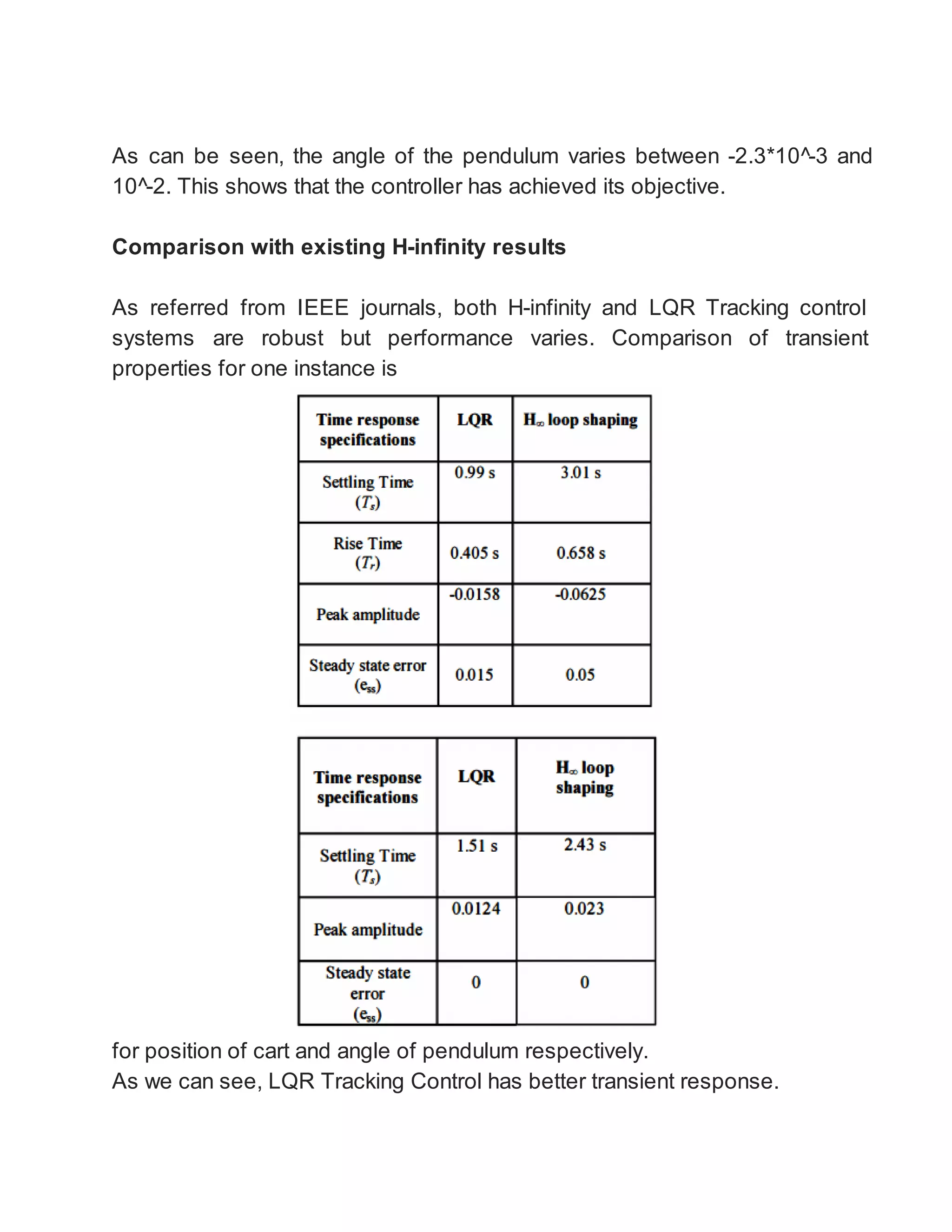
3) Simulation results demonstrated the robustness of the designed controller under system uncertainties, showing improved performance over existing H-infinity control methods.