جزوه کنترل مدرن دکتر برزمینی دانشگاه تهران مرکز این جزوه توسط دکتر محمد اعرابیان جمع آوری شده است. https://marabian.ir

![3
:اسپن مفهوم
اگر
:
𝑟 = [𝑟1, 𝑟2, 𝑟3]
[𝑟1, 𝑟2, 𝑟3] = [𝑎 + 𝑏 , 2𝑎 + 𝑏 + 2𝑐 , 𝑎 + 𝑏 − 𝑐]
𝑎 + 𝑏 = 𝑟1
→ 2𝑎 + 𝑏 + 2𝑐 = 𝑟2
𝑎 + 𝑏 − 𝑐 = 𝑟3
ماتریسی فرم
می زیر معادالت دستگاه
:باشد
𝐴𝑥 = 𝑦 → [
1 1 0
2 1 2
1 1 −1
] [
𝑎
𝑏
𝑐
] = [
𝑟1
𝑟2
𝑟3
]
(𝑎 + 𝑏)(2𝑎 + 𝑏 + 2𝑐)(𝑎 + 𝑏 − 𝑐)
بایدبررس حال
ای که کنیم ی
.یانه دارد جواب یک حداقل یعنی ناسازگار یا است سازگار معادالت دستگاه ن
ماتریس باید منظور این برای
A
یعنی .باشد منفرد غیر
|𝐴| ≠ 0
.باشد
که جایی آن از
|𝐴| = 0
دلخواه بردار هر برای بنابراین .باشد می
𝑟 = [𝑟1, 𝑟2, 𝑟3]
پیدا جواب یک توان می
.کرد
[
1 1 0
2 1 2
1 1 −1
] [
𝑎
𝑏
𝑐
] = [
𝑟1
𝑟2
𝑟3
]
های بردار لذا
𝑤 = [0 , 2 , −1]
و
𝑣 = [1 , 1, 1]
و
𝑢 = [1 , 2 , 1]
برداری فضای
𝑅3
.کند می اسپم را
𝑟2 𝑟3
𝑟1
𝑢 𝑤
𝑣
اسپن بردار](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-3-2048.jpg)
![4
___________________________________________________________________
:داخلی ضرب
𝑎
⃗. 𝑏
⃗⃗ = 𝑎1𝑏1 + 𝑎2𝑏2 + 𝑎3𝑏3 + ⋯
عدد یک جواب داخلی درضرب
.شود می )(اسکالر
(1 3 5 و 2 4 6 ) → 𝑎
⃗. 𝑏
⃗⃗ = (1 × 2) + (3 × 4) + (5 × 6) = 2 + 12 + 30
= 44
:خارجی ضرب
ص
81
ضر
با را خارجی ب
×
.دهیم می نشان
.است بردار جواب .شود می بردار یک درنتیجه خارجی ضرب
𝑎
⃗ = (𝑎1 , 𝑎2 , 𝑎3) 𝑏
⃗⃗ = (𝑏1 , 𝑏2 , 𝑏3)
𝑎
⃗ × 𝑏
⃗⃗ = |
𝑖 𝑗 𝑘
𝑎1 𝑎2 𝑎3
𝑏1 𝑏2 𝑏3
| = |
𝑎2 𝑎3
𝑏2 𝑏3
| 𝑖
⃗ − |
𝑎1 𝑎3
𝑏1 𝑏3
| 𝑗
⃗ + |
𝑎1 𝑎2
𝑏1 𝑏2
| 𝑘
⃗⃗
= (𝑎2𝑏3– 𝑎3𝑏2 , 𝑎3𝑏1– 𝑎1𝑏3, 𝑎1𝑏2– 𝑎2𝑏1 )
:نکته
.کند می بیان را حجم برداربود سه اگر و کند می رابیان اگردوبرداربودمساحت
:اسپن مفهوم
𝑢 = [1 , 2 , −1] , 𝑣 = [3 , −1 , 1] , 𝑤 = [−3 , 8 , −5]
𝑎𝑢 + 𝑏𝑣 + 𝑐𝑤 = 𝑎[1 , 2 , −1] + 𝑏[3 , −1 , 1] + 𝑐[−3 , 8 , −5]
= [𝑎 + 3𝑏 − 3𝑐 , 2𝑎 − 𝑏 + 8𝑐 , −𝑎 + 𝑏 − 5𝑐]
𝑤و 𝑣و 𝑢
در
𝑐 و 𝑏 و 𝑎
ضرب
.اند شده
𝒂𝟏 𝒃𝟏 𝒄𝟏 𝒂𝟐 𝒃𝟐 𝒃𝟑
𝒂𝟑
𝒄𝟐 𝒄𝟑
𝒂𝟏 𝒃𝟏 𝒄𝟏 𝒂𝟐 𝒄𝟐
𝒃𝟐 𝒂𝟑 𝒃𝟑 𝒄𝟑](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-4-2048.jpg)
![5
مع دستگاه این ماتریسی فرم
باشد می زیر صورت به ادالت
:
𝐴𝑥 = 𝑦 → [
1 3 −3
2 −1 8
1 1 −5
] [
𝑎
𝑏
𝑐
] = [
𝑟1
𝑟2
𝑟3
]
|𝐴| = 0
که جایی ازآن
|𝐴| = 0
.ندارد جوابی هیچ و ناسازگاربوده مذکور معادالت دستگاه ،باشد می
بردارهای لذا
𝑤 = [−3 , 8 , −5]
و
𝑣 = [3 , −1 , 1]
و
𝑢 = [1 , 2 , −1]
ترکیب یک صورت به توان نمی را
بردار فضای بردارهای این پس .نوشت
𝑅3
.کند نمی اسپن را
:بردارها خطی وابستگی و خطی استقالل
:نکته
.هستند وابسته داشتند ضریب هم به نسبت اگر .نیستند وابسته باشد صفر برابر اگر دترمینال
ب
ر
های دار
𝑢1, 𝑢2, … , 𝑢𝑛
.گویند مستقل را
ا
:زیر شکل به ی معادله گر
𝑐1𝑢1 + 𝑐2𝑢2 + ⋯ + 𝑐𝑛𝑢𝑛 = 0
اگر
𝑐1, 𝑐2, … , 𝑐𝑛
.باشد زیربرقرار شرط ازای به فقط ،هستند ثابتی اسکالرهای
𝑐1 = 𝑐2 = ⋯ = 𝑐𝑛 = 0
ها بردار صورت این درغیر
ی
𝑢1, 𝑢2, … , 𝑢𝑛
.گویند خطی وابسته را
*صفحه
20
فایل
مثال
6
یا خطی استدالل :
.کنید بررسی زیررا بردارهای خطی وابستگی
𝑢1 = [−2 , 1 ] , 𝑢2 = [−1 , −3 ] , 𝑢3 = [4 , −2 ]
𝑢 𝑤
𝑎
𝑣
𝑐
𝑏
𝑥 𝑦
=
𝐴](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-5-2048.jpg)
![6
ی رابطه به باتوجه
𝑐1𝑢1 + 𝑐2𝑢2 + ⋯ + 𝑐𝑛𝑢𝑛
:داریم
𝑐1[−2 , 1 ] + 𝑐2[−1 , −3 ] + 𝑐3[4 , −2 ] = 0
[−2𝑐1 − 𝑐2 + 4 𝑐3 , 𝑐1 − 3𝑐2 − 2𝑐3] = [0 ,0 ]
[
−2𝑐1 − 𝑐2 + 4 𝑐3
𝑐1 − 3𝑐2 − 2𝑐3
] = [
0
0
]
𝑐1 = 2 𝑐3
𝑐2 = 0
:مثال
𝑢1 = [1 , −2 , 3 , −4 ] , 𝑢2 = [−1 , 3 , 4 , 2 ] , 𝑢3 = [1 , 1 , −2 , −2 ]
ماتریس یک
4 × 3
:
[
1 −1 1
−2 3 −1
−3 −4 −2
−4 2 −2
] = [
0
0
0
0
]
𝑅𝑎𝑛𝑘 = 3
یعنی نیستند وابسته و ندارند رابطه هم هابا ستون از کدام هیچ چون
𝑢1, 𝑢2, 𝑢3
خطی مستقل
.هستند
𝑐1 = 𝑐2 = 𝑐3
ب جایگشت
:ردارها
R
اگربردارهای
𝑣1, 𝑣2, … , 𝑣𝑛
بردارهای ،که است آن باشند داشته خطی استقالل ازبردارهای جایگشت یک
𝑢1, 𝑢2, … , 𝑢𝑛
.بود خواهد نیزیکسان بردارها دودسته این اسپن فضای ازطرفی باشند خطی مستقل
𝑆𝑃{𝑢1, 𝑢2, … , 𝑢𝑛} = 𝑆𝑃{𝑣1, 𝑣2, … , 𝑣𝑛 }
جایگشت عمل درانجام
طول
،
نمی تغییر بردارها تعداد و اندازه
.کند
𝑐1 = 2𝑡
𝑐2 = 0
𝑐3 = 𝑡
𝑐1 − 2𝑐3 = 0
𝑐1 = 2𝑐3
𝑐1 = 2𝑡
t](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-6-2048.jpg)
![7
:نکته
Rank
.گیریم درنظرمی ستونی را
:نکته
که جایی ازآن
|𝐴| ≠ 0
بردارهای بنابراین ،است
𝑢1, 𝑢2 𝑢3
.باشند می خطی مستقل
:مثال
𝑐1[2 , 1 , 1 ] + 𝑐2[3 , 4 ,1 ] + 𝑐3[5 , 2 , 5 ] = 0
ماتریس
→ [
2 3 5
1 4 2
2 1 5
] [
𝑐1
𝑐2
𝑐3
] = [
0
0
0
]
|𝐴| = −2
بردارهای بنابراین صفرنشد دترمینال
𝑣1, 𝑣2 , 𝑣3
.باشند می خطی مستقل
:برداری فضای دریک پایه تغییر
کنیدبردارهای فرض
𝑒1, 𝑒2, … , 𝑒𝑛
بردارهای و
𝑣1, 𝑣2, … , 𝑣𝑛
برداری فضای برای پایه بردارهای دسته دو
n
مانند بعدی
𝑣
مانند فضا این به متعلق بردار یک صورت دراین باشند می
𝑢
می زیر دوصورت به را
.داد نمایش توان
𝑢 = 𝑏1𝑒1 + 𝑏2𝑒2 + ⋯ 𝑏𝑛 𝑒𝑛 = 𝑐1𝑣1 + 𝑐2𝑣2 + … + 𝑐𝑛𝑣𝑛
در که
آن
𝑐1, 𝑐2, … , 𝑐𝑛
و
𝑏1, 𝑏2, … , 𝑏𝑛
این .باشند می مربوطه های پایه با متناسب اسکالرهای
اسکالرها
را
[
2 3 5
1 4 2
2 1 5
] 𝑒1 = [
1
0
0
] = 𝑖
𝑒2 = [
0
1
0
] = 𝑗
𝑒3 = [
0
0
1
] = 𝑘
G(S)=C (𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-7-2048.jpg)
![8
های بردار ی مجموعه
𝑒1, 𝑒2, 𝑒3
و
𝑣1, 𝑣2 , 𝑣3
درفضای
𝑅3
می پایدار ی دسته دو تشکیل
.دهند
𝐸: {𝑒1 = [1,0,0], 𝑒1 = [0,1,0], 𝑒1 = [0,0,1]}
𝑉: {𝑣1 = [1, −1 , 1], 𝑒1 = [0 , 1 , 2], 𝑒1 = [3 , 0 , −1]}
ی پایه متغیراز متناظربرای تبدیل ماتریس
𝑣1, 𝑣2 , 𝑣3
ی پایه به
𝑒1, 𝑒2, 𝑒3
:بیابید را
های بردار از هریک منظور این برای
𝑣1, 𝑣2 , 𝑣3
ترکیب یک صورت به را
های بردار از خطی
𝑒1, 𝑒2, 𝑒3
می
:نویسیم
ی صفحه
44
ادامه جواب
𝑒1 = [1 , 0 , 0] = (
1
10
) 𝑣1 + (
1
10
) 𝑣2 + (
3
10
) 𝑣3
𝑉 = [
1 0 3
−1 1 0
1 2 −1
]
𝑒3 = [0 , 0 , 1] → 𝐾31𝑉1 + 𝐾32𝑉2 + 𝐾33𝑉3
ضرای
ب
k
برابر ها آن مجموع که طوری به کنیم می حساب را
1
شود
.
جواب →
3
10
(1) +
3
10
(2) + (
−1
10
) (−1) = 1
ضرایب
v
ها
←
k
𝑣1 𝑣1
𝑣1
𝑣2 𝑣2 𝑣2 𝑣3
𝑣3
𝑣3
𝑖
𝑘
𝑗
𝑥
𝑦
𝑧
𝑒1
𝑒2
𝑒3
1 −1
2
*
*](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-8-2048.jpg)
![9
:ماتریس دریک پوچ فضای مفهوم
مانند خطی نگاشت یک پوچی فضای
A
بردارهای ی کلیه شامل است ای مجموعه
𝑥𝑛×1
رابطه که
𝐴𝑥 =
0
سا برآورده را
برآورده را زی
نماد با پوچی فضای سازد
𝑁(𝐴)
.شود می داده نشان
𝑁(𝐴) = {∀𝑥𝜖𝑉1 → 𝐴𝑥 = 0}
ازای (به
x
ی معادله که هایی
A
)کند راصفر
.نامند می ماتریس آن پوچی را پوچی فضای بعد
برداروی ،ویژه مقادیر
:مشخصه ی معادله و ژه
الندا با که مقادیرویژه
(𝜆)
ش می داده نشان
همان ،ود
S
ها آن ازای به که .است سیستم های قطب یا
.شود می پایدار سیستم
:مثال
𝐴 = [
2 4
−2 1
]
مربعی ماتریس
𝐴𝑛×𝑛
ماتریس مشخصه ای جمله چند زیررا دترمینال .درنظربگیرید را
𝐴𝑛×𝑛
.نامند می
|𝜆𝐼𝑛 − 𝐴|
مرتبه ای چندجمله یک که
n
از
𝜆
معادله .باشد می
صور بدین مشخصه ی
.شود می تعریف ت
|𝜆𝐼𝑛 − 𝐴| = 0
:مثال
𝐴 = [
2 4
−2 1
] → 𝜆 [
1 0
0 1
] = [
𝜆 0
0 𝜆
]
𝐴 = [
−2 −4
2 −1
] → [
𝜆 0
0 𝜆
] + [
−2 −4
2 −1
] = [
𝜆 − 2 −4
2 −1 + 𝜆
]
دترمینال
→
(−3 + 𝜆)(−1 + 𝜆) − (−8) = (𝜆2
− 4𝜆 + 3) + 8 = 𝜆2
− 4𝜆 + 11
𝑏2
− 4𝑎𝑐 = (−4)2
− 4(1)(11) = 16 − 44 = −28
دلتا → 𝜆1,2 =
−𝑏 ± √Δ
2𝑎
=
4 ± 𝑗√28
2
𝜆𝐼𝑛](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-9-2048.jpg)
![10
𝜆1 = 2 + 𝑗5.2
𝜆2 = 2 − 𝑗5.2
:مینور کهادیا
اگر
A
به ستون و سطر یاچند یک ازحذف که کوچکتری یا مربعی ماتریس باشد مربعی ماتریس یک
می دست
.گویند می مینور یا کهاد را آید
سطر اگرفقط
I
ستو و م
ن
j
ازماتریس م
A
.گویند می اول مرتبه کهاد ،کهاد این به شود می حذف
نکته
:
یا همسازه ی محاسبه برای ازکهاد
( کفاکتور
Cofactor
.شود می استفاده )
[
5 −1
3 −1
] = 𝑀11 = −1 × (−1)𝑖+𝑗
= −1
𝑀12 = 3 × (−1)3
= −3
𝑀21 = −1 × (−1)3
= 1
𝑀21 = 5 × (−1)4
= 5
𝐶𝑜 𝑓𝑎𝑐𝑡𝑜𝑟𝐴 = [
−1 −3
1 5
] = 𝐶𝑇
= [
−1 1
−3 5
]
𝐴−1
=
1
|𝐴|
[
−1 1
−3 5
]
معکوس ماتریس
3 × 3
:
𝐴 = [
−2 −2 0
0 0 1
0 −3 −4
]
کلی حالت
[
𝑀11 𝑀12 𝑀13
𝑀21 𝑀22 𝑀23
𝑀31 𝑀32 𝑀33
]
𝑖 𝑗](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-10-2048.jpg)
![11
:قبل مثال جواب
𝑀11 = −2 |
0 1
−3 −4
| = −2 × 3 = −6 → −6 × (−1)2
= −6
𝑀12 = −2 |
0 1
0 −4
| = 0
𝑀13 = 0 |0| = 0
𝑀32 = −3 |
−2 0
0 1
| = 6 = 6 × (−1)5
= −6
𝑀31 = 0 × |
−2 0
0 1
| = 0
𝑀33 = −4 |
−2 −2
0 0
| = 0
𝑀21 = 0 × |
−2 0
−2 −4
| = 0
𝑀22 = 0 × |
−2 0
0 −4
| = 0
𝑀23 = −2 |
−2 −2
0 −3
| = 6 = 6 × (−1)5
= −6
[
−6 0 0
0 0 −6
0 −6 0
] = 𝐶𝑜𝑓𝑎𝑐𝑡𝑜𝑟 = 𝐶
𝐶𝑇
= [
−6 0 0
0 0 −6
0 −6 0
]
|𝐴| = −2 |
0 1
−3 −4
| − (−2) |
0 1
0 −4
| + 0 |
0 0
0 −3
| = −6
𝐴−1
=
𝐶𝑇
|𝐴|
=
1
|𝐴|
[
−6 0 0
0 0 −6
0 −6 0
] =
1
−6
[
−6 0 0
0 0 −6
0 −6 0
] = [
1 0 0
0 0 1
0 1 0
]
مع ماتریس ی محاسبه
هم کیلی روش به کوس
:یلتون
|𝜆𝐼 − 𝐴| = 0
ای چندجمله = با 𝜆 → 𝜆 = 𝐴 کردن حل به شروع](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-11-2048.jpg)
![12
م
ثال
:آورید دست به همیلتون کیلی روش به زیررا معکوس ماتریس :
𝐴 = [
0 −3 0
3 0 0
0 0 −1
]
حل → 𝜆 × [
1 0 0
0 1 0
0 0 1
] = [
𝜆 0 0
0 𝜆 0
0 0 𝜆
]
[
𝜆 0 0
0 𝜆 0
0 0 𝜆
] − [
0 −3 0
3 0 0
0 0 −1
] = [
𝜆 3 0
−3 𝜆 − 3 0
0 0 𝜆 + 1
]
|𝜆𝐼 − 𝐴| = 𝜆 |
𝜆 0
0 𝜆 + 1
| − (+3) |
−3 0
0 𝜆 + 1
| + 0 |
−3 𝜆
0 0
| = 𝜆3
+ 𝜆2
+ 9𝜆 + 9
= 0
جای به
𝜆
←
𝐴
گذاریم می
:
(𝐴3
+ 𝐴2
+ 9𝐴 + 9 = 0)
𝐴2
+ 𝐴 + 9 + 9𝐴−1
= 0 → 𝐴2
+ 𝐴 + 9 = −9𝐴−1
چون
9
است خالی عدد یک
همانی ماتریس دریک
.شود می ضرب
𝐴−1
=
−1
9
(𝐴2
+ 𝐴 + 9) → کنیم می باز
𝐴−1
=
−1
9
[[
−9 0 0
0 −9 0
0 0 1
] + [
0 −3 0
3 0 0
0 0 −1
] + 9 [
1 0 0
0 1 0
0 0 1
]] =
−1
9
[
0 −3 0
3 0 0
0 0 9
]
=
[
0
1
3
0
−1
3
0 0
0 0 −1]
𝜆𝐼
𝜆𝐼 − 𝐴
𝜆𝐼 − 𝐴
𝐴−1](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-12-2048.jpg)
![13
فضا و تبدیل تابع بین ی رابطه
:حالت ی
𝑥 = 𝐴𝑥 + 𝐵𝑢
̇
𝑦 = 𝐶𝑥 + 𝐷𝑢
𝐺(𝑆) =
ای چندجمله
باشد بیشتر باالیی از توان باید ای جمله چند
از سیستم بندی تقسیم
:نسبی درجه نظر
مخرج درجه
n
صورت درجه و
m
:
1
-
سره اکیدا ← 𝑛 > 𝑚 − 1
lim
𝑆→∞
𝐺(𝑆) = 0
2
-
سره ← 𝑛 = 𝑚
lim
𝑆→∞
𝐺(𝑆) = ثابت عدد
3
-
ناسره تابع ← 𝑛 < 𝑚
lim
𝑆→∞
𝐺(𝑆) = ∞
𝑥 = 𝐴𝑥 + 𝐵𝑢
̇
𝑦 = 𝐶𝑥 + 𝐷𝑢
𝑆𝑋(𝑆) + 𝑥(0) = 𝐴𝑋(𝑆) + 𝐵𝑢(𝑆) = 0
𝑌(𝑆) = 𝐶𝑋(𝑆) + 𝐷𝑢(𝑆)
𝑋(𝑆) = (𝑆𝐼 − 𝐴)−1
. 𝐵𝑢(𝑆)
𝑌(𝑆) = 𝐶[(𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷]𝑢(𝑆)
𝐺(𝑆) =
𝑌(𝑆)
𝑢(𝑆)
= 𝐺(𝑆) = 𝐶(𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷
𝐿
→
𝑆𝑋(𝑆) + 𝑥(0) + 𝐴𝑥(𝑆)
𝐿](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-13-2048.jpg)
![14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
𝑌(𝑆) = 𝐶(𝑆𝐼 − 𝐴)−1
𝐵𝑢(𝑆) + 𝐷𝑢(𝑆)
𝑌(𝑆) = 𝑢(𝑆)[𝐶(𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷]
𝐺(𝑆) =
𝑌(𝑆)
𝑢(𝑆)
=
𝑢(𝑆)[𝐶(𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷]
𝑢(𝑆)
𝐺(𝑆) = [𝐶(𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷]
حال پاسخ ما تبدیل درتابع
صفر ت
پاسخ به درنتیجه سپس .نداریم را صفر ورودی پاسخ ولی ،داریم را
.است تبدیل تابع نمایش های نقص از یکی این .یافت نخواهیم دست سیستم کامل
:آورید زیررابدست های سیستم تبدیل تابع :مثال
𝑥1
̇ = −5𝑥1 − 𝑥2 + 2𝑢
𝑥2
̇ = 3𝑥1 − 𝑥2 + 5𝑢
𝑦 = 𝑥1 + 2𝑥2
𝑥 = 𝐴𝑥 + 𝐵𝑢
̇
[
𝑥1
̇
𝑥2
̇
] = [
𝑎11 𝑎12
𝑎21 𝑎22
] 𝑥 + [
𝑏1
𝑏2
] 𝑢
𝐶 = [𝐶1, 𝐶2] , 𝐷 = [1]
اصلی تبدیل تابع = 𝐺(𝑆) = 𝐶(𝑆𝐼 − 𝐴)−1
𝐵 + 𝐷
𝐴 = [
−5 −1
3 −1
] 𝑥 + [
2
5
] 𝑢
𝐶 = [1,2] , 𝐷 = [0]
(𝑆𝐼 − 𝐴) = [
𝑆 0
0 𝑆
] − [
−5 −1
3 −1
] = [
𝑆 + 5 1
−3 𝑆 + 1
]
(𝑆𝐼 − 𝐴)−1
= [
𝑆 + 5 1
−3 𝑆 + 1
]
−1
=
1
|𝐴|
|
𝑆 + 1 −1
3 𝑆 + 5
|
=
1
𝑆2 + 6𝑆 + 8
[
𝑆 + 1 −1
3 𝑆 + 5
]
CT](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-14-2048.jpg)
![15
ضر درماتریس اول همان را دترمینال
.کنیم نمی ب
در را ماتریس و داریم می نگه فعال محاسبه ترشدن ساده رابرای مخرج
B
و
C
.کنیم می ضرب
[1 2] × [
𝑆 + 1 −1
3 𝑆 + 5
] = [𝑆 + 1 + 6 − 1 + 2𝑆 + 10]
[𝑆 + 7 2𝑆 + 9] [
2
5
] = [2𝑆 + 14 + 10𝑆 + 45]
[
12𝑆 + 59
𝑆2 + 6𝑆 + 8
]
درفضای زیررا دیفرانسیل معادله
بنو حالت
: یسید
𝒚′′
+ 𝟔𝒚′
+ 𝟕𝒚 = 𝟓𝒖(𝑺)
برای
:کنیم محاسبه زیررا های ماتریس باید حالت فضای به تبدیل
𝐴 =? 𝐵 =? 𝐶 =? 𝐷 =?
→ 𝑥1 = 𝑦 , 𝑥̇1 = 𝑦̇ = 𝑥2
→ 𝑥2 = 𝑦̇ , 𝑥̇2 = 𝑦̈
𝑦′′
= −6𝑦′
− 7𝑦 + 5𝑢(𝑆) → 𝑥̇2 = −6𝑥̇1 − 7𝑥1 + 5𝑢
کنیم می هارامحاسبه ماتریس فرمول ازاین
:
[
𝑥̇1
𝑥̇2
] = [
0 1
−7 −6
] [
𝑥1
𝑥2
] + [
0
5
] 𝑢
𝑦 = 𝐶𝑥
𝑦 = [1 0] [
𝑥1
𝑥2
]
𝑥1 = 𝑦
𝑥1 = 𝑦̇ = 𝑥2
𝑥̇2 = 𝑦̈](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-15-2048.jpg)
![16
:غیرخطی مدل
𝑥̇ = 𝑓(𝑥, 𝑢, 𝑡)
𝑦 = 𝑔(𝑥, 𝑢, 𝑡)
:مقادیرویژه
می ویژه مقادیر مخرج های ریشه تبدیل درتابع
.باشند
تبدیل =تابع
ها صفر
مشخصه معادله های ریشه
تابع
تبدیل ←
دیفرانسیل ←معادله
برسیم حالت فضای به ←ازخودسیستم
:مقادیرویژه ی محاسبه
|𝑆𝐼 − 𝐴| = 0 → |𝜆𝐼 − 𝐴| = 0
𝑥̇ = 𝐴𝑥 + 𝐵𝑢
𝑦 = 𝐶𝑥 + 𝐷
مثال
:
𝐴 = [
5 2 0
1 −1 1
1 0 0
]
ماتریس این رنک
3
مست چون باشد می
.هستند ازهم قل
|𝜆𝐼 − 𝐴| = 0
توان می حالت این برای
𝜆
.کنیم برعکس را ها عالمت تمام سپس کنیم اضافه اصلی قطر به را ها
𝜆𝐼 − 𝐴 = [
𝜆 − 5 −2 0
−1 𝜆 + 1 −1
−1 0 𝜆
]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-16-2048.jpg)

![18
مثال
:کنید حساب را ویژه مقادیر مقدار :
𝐴 = [
3 4
2 1
]
|𝜆𝐼 − 𝐴| = 0 → |
𝜆 − 3 −4
−2 𝜆 − 1
|
|𝜆𝐼 − 𝐴| = (𝜆 − 3)(𝜆 − 1) − 8 = 𝜆2
− 𝜆 − 3𝜆 + 3 − 8
→ 𝜆2
− 4𝜆 − 5 = 0 → (𝜆 − 5)(𝜆 + 1) = 0 → 𝜆1 = 5 𝜆2 = −1
ت تابع از ما :نکته
حالت فضای به بدیل
که تابع صورت تبدیل اگردرتابع .کنیم حذف را ورودی تا رویم می
حذف باهم صورت دراین باشد برابر ها قطب از یکی با است ورودی همان
تابع از ما بنابراین ،شوند می
ببر ازبین است هابرابر قطب از بایکی که درحالی را ورودی اثر تا رویم می حالت فضای به تبدیل
.یم
× × ×
ناپایدار
−1 −0.35 5.35
× ×
𝜆1 = 5
𝜆2 = −1](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-18-2048.jpg)
![19
: سیستم دینامیک از حالت فضای ی محاسبه
𝑥 = [
𝑉𝐶
𝑖𝐿1
𝑖𝐿2
]
𝐾𝑉𝐿 → ولتاژ حسب بر → جریان
𝐾𝐶𝐿 → جریان حسب بر → ولتاژ
مش ی معادله
1
:
−𝑉𝑖 + 𝑅1𝑖1 + 𝑉𝐿1 + 𝑉𝐶 = 0
مش ی معادله
2
:
−𝑉𝐶 + 𝑉𝐿2 + 𝑅2𝑖2 = 0
گر ی معادله
: * ه
𝑖𝐶 = 𝑖1 − 𝑖2
:نکته
خازن → کند می پیدا تغییر جریان → معلوم ولتاژ
سلف → کند می تغییر ولتاژ → معلوم جریان
𝑉𝐿 =
𝑑𝑖𝐿
𝑑𝑡
× 𝐿
𝑖𝑐 =
𝑑𝑉𝐶
𝑑𝑡
× 𝐶
L1 L2
R1
i1 i2
+
-
+
-
+
-
VL1 VL2
Vc
Vo
+
-
Ic
i L2
i L1
Vi
*](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-19-2048.jpg)
![20
بنویسیم را معلوم جریان و ولتاژ مشتق باید محاسبه برای خازن و درسلف
:
1- 𝑉𝐿1 = 𝑉𝑆 − 𝑅1𝑖1−𝑉𝐶 = 𝑉𝑆 − 𝑅1𝐼1−𝑉𝐶
2- 𝑉𝐿1 = 𝑉𝐶 − 𝑅2𝑖2
3- 𝑖𝐶 = 𝑖1 − 𝑖2 = 𝑖𝐿1 − 𝑖𝐿2
1- 𝐿1
𝑑𝑖𝐿1
𝑑𝑡
= 𝑉𝑆 − 𝑅1𝑖𝐿1−𝑉𝐶
2- 𝐿2
𝑑𝑖𝐿2
𝑑𝑡
= 𝑉𝐶 − 𝑅2𝑖𝐿2
3- 𝐶
𝑑𝑉𝐶
𝑑𝑡
= 𝑖𝐿1 − 𝑖𝐿2
1-
𝑑𝑖𝐿1
𝑑𝑡
=
1
𝐿1
(𝑉𝑆 − 𝑅1𝑖𝐿1−𝑉𝐶)
2-
𝑑𝑖𝐿2
𝑑𝑡
=
1
𝐿2
(𝑉𝐶 − 𝑅2𝑖𝐿2)
3-
𝑑𝑉𝐶
𝑑𝑡
=
1
𝐶
(𝑖𝐿1 − 𝑖𝐿2)
:حالت فضای محاسبه
خروجی ی معادله خروجی ی معادله = 𝑉
𝑜 = 𝑉𝑅2 = 𝑅2𝑖2 = 𝑅2𝑖𝐿2
𝑥̇ = [
𝑖𝐿1
̇
𝑖𝐿2
̇
𝑉𝐶
̇
] =
[
−
𝑅1
𝐿1
0 −
1
𝐿1
0 −
𝑅2
𝐿2
1
𝐿2
1
𝐶
−
1
𝐶
0 ]
[
𝑖𝐿1
𝑖𝐿2
𝑉𝐶
] + [
1
𝐿1
0
0
] 𝑉𝑠
ضریب
𝑖𝐿2
.شود می ضرب درجلو چون نویسیم نمی را
𝑉
𝑜 = 𝑦 = 𝐶 [
𝑖𝐿1
𝑖𝐿2
𝑉𝐶
] + 𝐷 = [0 𝑅2 0 ]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-20-2048.jpg)
![22
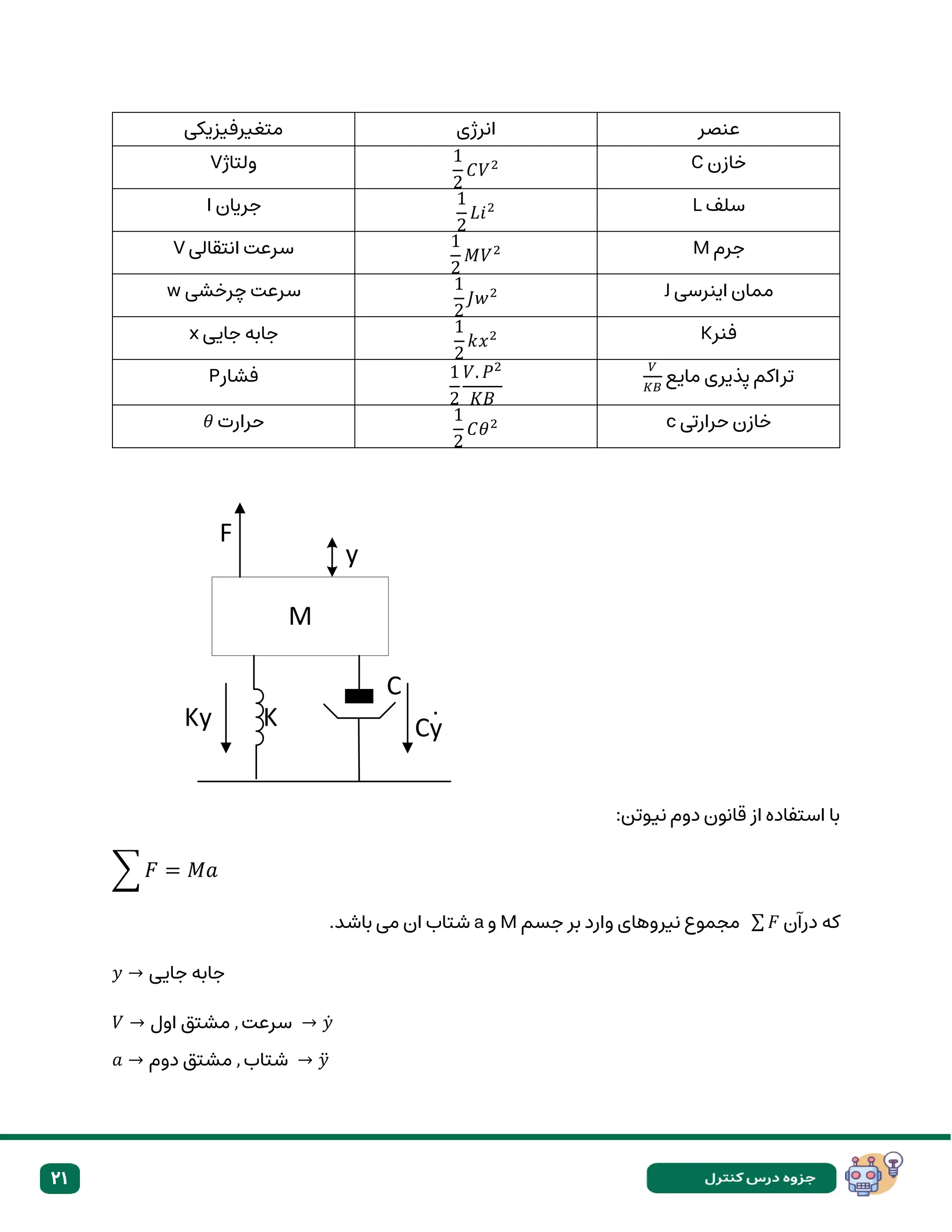
𝐹 − 𝐾𝑦 − 𝐶𝑦̇ = 𝑀𝑎 → 𝐹 − 𝐾𝑦 − 𝐶𝑦̇ = 𝑀𝑦̈
𝑎 = 𝑦̈
𝑥1 = 𝑦
𝑥2 = 𝑦̇ = 𝑥1
̇
𝑥3 = 𝑦̈ = 𝑥2
̇
𝑥2
̇ = 𝑦̈ =
1
𝑀
(𝐹 − 𝐾𝑦 − 𝐶𝑦̇) =
1
𝑀
(𝐹 − 𝐾𝑥1 − 𝐶𝑥2)
[
𝑥1
̇
𝑥2
̇
] [
0 1
−
𝐾
𝑀
−
𝐶
𝑀
] [
𝑥1
𝑥2
] + [
0
1
𝑀
] 𝑢
𝑦 = [1 0] [
𝑥1
𝑥2
]
𝑃 × 𝑛
𝑛 × 𝑚
𝑛 × 𝑛](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-22-2048.jpg)
![23
هشتم جلسه
:حالت فضای ی محاسبه
𝑥 = [
𝑦1
𝑦1
̇
𝑦2
𝑦̇2
]
𝑥1 = 𝑦1
𝑥2 = 𝑦1
̇ = 𝑥1
̇
𝑥3 = 𝑦2
𝑥4 = 𝑦̇2 = 𝑥̇3
ماتریس ازمقدارهای دوتا
a
استفاده با را
ها معادله ازاین
.آوریم می بدست
𝐹1 − 𝐾1𝑥1 − 𝐶
𝑑
𝑑𝑡
(𝑥1 − 𝑥3) = 𝑀1
𝑑2𝑥1
𝑑𝑡2
= 𝑀1
𝑑
𝑑𝑡
(
𝑑𝑥2
𝑑𝑡
) = 𝑀1
𝑑𝑥2
𝑑𝑡
𝐹2 − 𝐾2𝑥3 − 𝐶
𝑑
𝑑𝑡
(𝑥3 − 𝑥1) = 𝑀2
𝑑𝑥̇3
𝑑𝑡
= 𝑀2
𝑑𝑥4
𝑑𝑡
M1
F2
y2
K1y1
K2
C
M2
K1
F1
y1
C(y2-y1)
K2y2
C(y1-y2)](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-23-2048.jpg)
![24
مرحله
1
𝐹1 − 𝐾1𝑥1 − 𝐶𝑥1
̇ + 𝐶𝑥3
̇ = 𝑀1𝑥2
̇
𝐹2 − 𝐾2𝑥3 − 𝐶𝑥3
̇ + 𝐶𝑥1
̇ = 𝑀2𝑥4
̇
مرحله
2
برحسب را معادله چپ بایدسمت مرحله دراین
x
شود حذف مشتقات و بنویسیم
.
𝐹1 − 𝐾1𝑥1 − 𝐶𝑥2 + 𝐶𝑥4 = 𝑀1𝑥2
̇
𝐹2 − 𝐾2𝑥3 − 𝐶𝑥4 + 𝐶𝑥2 = 𝑀2𝑥4
̇
𝑥̇ = 𝐴[𝑥] + 𝐵𝑢
𝑦 = 𝐶[𝑥] + 𝐷
[
𝑥̇1
𝑥̇2
𝑥̇3
𝑥̇4
] =
[
0 1 0 0
−
𝐾1
𝑀1
−
𝐶
𝑀1
0
𝐶
𝑀1
0 0 0 1
0
𝐶
𝑀2
−
𝐾2
𝑀2
−
𝐶
𝑀2]
[
𝑥1
𝑥2
𝑥3
𝑥4
] +
[
0 0
1
𝑀1
0
0 0
0
1
𝑀2]
[
𝐹1
𝐹2
]
𝑦 = 𝐶[𝑥] + 𝐷
_ _ _ _ _ _ _ _ _ _ _ _ __ _ __ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_ _ _ _ _ _ _
استفاد با
اول ی معادله از ه
با
شود می محاسبه دوم ی معادله از استفاده](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-24-2048.jpg)
![25
:پذیر کنترل فرم
𝐺(𝑆) =
𝑏0𝑆𝑛
+ 𝑏1𝑆𝑛−1
+ 𝑏2𝑆𝑛−2
+ ⋯ + 𝑏𝑛−1𝑆 + 𝑏𝑛
𝑆𝑛 + 𝑎1𝑆𝑛−1 + 𝑎2𝑆𝑛−2 + ⋯ + 𝑎𝑛
باید همواره تبدیل تابع
monic
با )استاندارد باشد(فرم یک مخرج توان بزرگترین ضریب یعنی باشد
𝑥̇ =
[
0 1 0 0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 1
0 0 0 0 0
−𝑎𝑛 −𝑎𝑛−1 … … −𝑎1]
فرم آن به که دهیم می قرار ماتریس سطر درآخرین منفی عالمت با چپ ازسمت را تبدیل تابع مخرج
.گویند پذیر کنترل
𝑦 = [𝑏𝑛 − 𝑎𝑛𝑏0 𝑏𝑛−1 − 𝑎𝑛−1𝑏0 … 𝑏1 − 𝑎1𝑏0]𝑥+b0u(t)
این
تحقق
تا که درصورتی و است پذیر کنترل همواره
نداشته مشترکی صفر و قطب سیستم تبدیل بع
باشد
پذیر روئت و تحقق
با که بود خواهد
Ac
.دهیم می نمایش
نوع سه : مثال
تحقق
بنویسید را زیر تابع با سیستم متفاوت
1
𝑆3 + 10𝑆2 + 27𝑆 + 18
𝐴 = [
0 1 0
0 0 1
0 0 0
−18 −27 −10
]
های سایردرایه و اصلی قطر قبلی ماتریس طبق
.نویسیم می مداررا
.شود می محاسبه صورت از
𝐵 = [
0
0
1
] 𝐶 = [1 0 0]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-25-2048.jpg)
![26
𝑥̇1 = 𝑥2
𝑥̇2 = 𝑥3
𝑥̇3 = −18𝑥1 − 27𝑥2 − 10𝑥3
𝐴 = [
0 1 0
0 0 1
0 0 0
−18 −27 −10
] [
𝑥1
𝑥2
𝑥3
]
:میسون روش بدلیل
∆𝑗= 1 − (پیشرو مسیر بدون های حلقه )
∆= 1 − (پیشرو مسیر با های حلقه )
𝑀𝑠 =
∑ 𝑀𝑗∆𝑗
∆
قبل درمثال دلیل همین به
× 𝑆−3
کردیم
1
𝑆3 + 10𝑆2 + 27𝑆 + 18
→
𝑆−3
1 − (10𝑆−1 − 27𝑆−2 − 18𝑆−3)
𝑥̇3
𝑢 𝑦
𝑥̇2
= 𝑥3
𝑥̇1
= 𝑥2
𝑥1 1
1 𝑆−1
𝑆−1
𝑆−1
-10
18
-27](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-26-2048.jpg)
![27
:پذیر روئیت فرم
𝐺(𝑆) =
𝑏0𝑆𝑛
+ 𝑏1𝑆𝑛−1
+ 𝑏2𝑆𝑛−2
+ ⋯ + 𝑏𝑛−1𝑆 + 𝑏𝑛
𝑆𝑛 + 𝑎1𝑆𝑛−1 + 𝑎2𝑆𝑛−2 + ⋯ + 𝑎𝑛
𝑥̇ =
[
0 0 … 𝑎𝑛
1 0 … 𝑎𝑛−1
0 1 … ⋮
0 0 ⋮
⋮ ⋮ ⋮
0 0 … 𝑎1 ]
+ [
𝑏𝑛 − 𝑎𝑛𝑏0
𝑏𝑛−1 − 𝑎𝑛−1𝑏0
⋮
𝑏1 − 𝑎1𝑏0
] 𝑢
𝑦 = [0 0 0 … … … … … 1]𝑥 + 𝑏0𝑢(𝑡)
این
تحقق
با .باشد نداشته مشترک صفر و قطب ،تبدیل تابع که درصورتی است پذیر روئیت همواره
𝐴𝑜
.دهند می نمایش
Observer
𝐴𝑜 = 𝐴𝐶
𝑇
𝐵𝑜 = 𝐶𝐶
𝑇
𝐶𝑜 = 𝐵𝐶
𝑇
روی است ستون چون
ت
پذیر
قبل مثال برای → 𝐴𝑜 = 𝐴𝐶
𝑇
= [
0 0 −18
1 0 −27
0 1 −1
]
𝐵𝑜 = 𝐶𝐶
𝑇
= [
1
0
0
] 𝐶𝑜 = 𝐵𝐶
𝑇
= [0 0 1]
روئیت فرم کنیم رسم اول به آخر از میسون روش به را اگر .کند می وارون را همه میسون درحالت
دس به پذیر
ی تجزیه ( باشد می پذیر کنترل و پذیر روئیت فرم بین دوگان مفهوم یک این .آید می ت
)کانونیکال](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-27-2048.jpg)


![30
𝑥̇ = [
𝑎 𝑏
𝑐 𝑑
] → |𝜆𝐼 − 𝐴| = 0 → [
𝜆 − 𝑎 −𝑏
𝑐 𝜆 − 𝑑
] → [
𝜆 − 𝑎 −𝑏
𝑐 𝜆 − 𝑑
] = 0
فرعی قطر در ضرب اصلی قطر دترمینان فرمول
→ 𝜆2
− (𝑎 + 𝑑)𝜆 + 𝑎𝑑 − 𝑏𝑐 = 0
اثبات
→ (𝜆 − 𝑎)(𝜆 − 𝑑) − (−𝑏)(−𝑐) = 𝜆2
− 𝑑𝜆 − 𝑎𝜆 + 𝑎𝑑 − 𝑏𝑐
= 𝜆2
− 𝜆(𝑎 + 𝑑) + 𝑎𝑑 − 𝑏𝑐
3
.
: تحقق روش
اگر
تحقق
پذیر کنترل کانونیکال صورت به
ب زیر رابطه مشخصات معادله باشد
ه
می دست
آید
:
𝐺(𝑆) =
1
𝑆3 + 10𝑆2 + 27𝑆 + 18
𝑥̇ = [
0 1 0
0 0 1
−18 −27 −10
] 𝑥 + [
0
0
1
] 𝑢
𝑦 = [1 0 0]𝑥
𝑆3
+ 10𝑆2
+ 27𝑆 + 18 = 0
4
.
نوشتن
قطری فرم روی از مشخصه معادله
:
𝑥̇ = [
𝜆1 0
0 𝜆2
] → (𝑆 − 𝜆1)(𝑆 − 𝜆2) = ∆(𝜆)
5
.
جردن روی از مشخصه معادله نوشتن
𝑥̇ = [
𝜆1 0
0 𝜆2
] → (𝑆 − 𝜆1)2
= ∆(𝜆)
𝜆1 = (𝑆 + 1) = 𝜆1 = −1
𝜆2 = (𝑆 + 6) = 𝜆1 = −6
𝜆3 = (𝑆 + 3) = 𝜆1 = −3
←
تقسیم روش](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-30-2048.jpg)
![31
𝜆ها
باشند یکی باید
می بندی تقسیم زیر دسته دو به ویژه بردارهای آوردن دست به
:شوند
1
-
متمایز
2
-
تکراری
مات یک برای
ریس
2 × 2
ویژه مقدار
𝜆1
و
𝜆2
ویژه بردار دو شاید اما داریم
𝑥1
و
𝑥2
باشیم نداشته
.
به
می دست به یافته تعمیم ویژه بردار همین خاطر
(ریشه آوریم
)تکراری های
1
)
روش به یافته تعمیم ویژه مقادیر
:مینور
ماتریس مینور ابتدا
(𝜆𝐼 − 𝐴)
به را
می دست
آوریم
𝜆
می نظر در پارامتر یک را
ستون هر سپس .گیریم
جایگذاری با را مستقل
𝜆
می نظر در ویژه بردار یک عنوان به
:گیریم
𝑎𝑑𝑗(𝜆𝐼 − 𝐴) = 𝐶𝑇(𝜆𝐼 − 𝐴)
:مثال
[
𝑎 𝑏
𝑐 𝑑
] = [
𝑀11 𝑀12
𝑀21 𝑀22
] = [
𝑀11 = 𝑑(−1)2
𝑀12 = 𝑐(−1)3
𝑀21 = 𝑏(−1)3
𝑀22 = 𝑎(−1)4]
= [
𝑑 −𝑐
−𝑏 𝑎
] − 𝐶𝑇
= [
𝑑 −𝑐
−𝑏 𝑎
]
مثال
:
:بگیرید نظر در را زیر حالت فضای مدل تحریک بدون قسمت
:کنید محاسبه را ویژه بردار و ویژه مقادیر
𝑥̇ = [
0 1 0
0 0 1
−18 −27 −10
] → پذیر کنترل
مشخصه معادله → 𝐺(𝑆) =
1
𝑆3 + 10𝑆2 + 27𝑆 + 18
مینور
adj](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-31-2048.jpg)
![32
ریشه محاسبه برای
.کرد تقسیم باید مشخصه معادله های
∆= 𝑆3
+ 10𝑆2
+ 27𝑆 + 18
(𝑆 + 1)(𝑆 + 3)(𝑆 + 6) →
می حساب را کدام هر *مینورهای
:کنیم
𝑀11 = [
𝜆 −1
27 𝜆 + 10
] = 𝜆(𝜆 + 10) − (−1)(27) = 𝜆2
+ 10𝜆 + 27 × (−1)2
𝑀12 = [
0 −1
18 𝜆 + 10
] = 0 − (−1)(18) = 18
18 × (−1)3
= −18
𝑀13 = [
0 𝜆
18 27
] = 0 − (𝜆)(18) = −18𝜆 = 18𝜆 × (−1)4
= −18𝜆
𝑀21 = [
−1 0
27 𝜆 + 10
] × (−1)2+1
= 𝜆 + 10
𝑀22 = [
𝜆 −1
18 𝜆 + 10
] × (−1)2+2
= 𝜆2
+ 10𝜆
𝑀23 = [
𝜆 −1
18 27
] × (−1)2+3
= (27𝜆 + 18) × (−1) = −27𝜆 − 18
𝑀31 = [
−1 0
𝜆 −1
] × (−1)4
= +1
𝑀32 = [
𝜆 0
0 𝜆
] × (−1)5
= +𝜆
𝑀33 = [
𝜆 −1
0 𝜆
] × (−1)6
= 𝜆2
(𝑆 + 1)
(𝑆 + 3)(𝑆 + 6)
−(𝑆3
+ 10𝑆2
+ 27𝑆 + 18)
𝜆1 = −1
𝜆2 = −6
𝜆3 = −3](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-32-2048.jpg)
![33
:مینورها *ماتریس
𝐶 = [
𝜆2
+ 10𝜆 + 27 −18 −18𝜆
𝜆 + 10 𝜆2
+ 10𝜆 −27𝜆 − 18
1 𝜆 𝜆2
]
𝐶𝑇
= [
𝜆2
+ 10𝜆 + 27 𝜆 + 10 1
−18 𝜆2
+ 10𝜆 𝜆
−18𝜆 𝜆 𝜆2
]
ستون یک است کافی فقط ویژه بردار محاسبه برای
𝑎𝑑𝑗(𝜆𝐼 − 𝐴)
و کنیم انتخاب را
𝜆
ستون آن در را ها
:دهیم قرار
ریشه آخر ستون در *
را ها
می قرار را ریشه معادل
:دهیم
𝜆1 = −1 [
1
−1
1
] → 𝑉1
𝜆2 = −3 [
1
−3
9
] → 𝑉2
𝜆3 = −6 [
1
−6
36
] → 𝑉3
𝑉 = [
1 1 1
−1 −3 −6
1 9 36
] → ویژه بردار
فندرموند ماتریس
ماتریس اگر
A
به
آنگاه ،باشند متمایز آن ویژه مقادیر و باشد ) پذیر کنترل و پذیر (رویت کانونیکال فرم
ماتریس
می حاصل فندرموند ماتریس طریق از سادگی به ویژه بردارهای
.شود
𝑉 = 2 × 2 = [
1 1
𝜆1 𝜆2
]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-33-2048.jpg)
![34
𝑉 = 2 × 3 = [
1 1 1
𝜆1 𝜆2 𝜆3
𝜆1
2
𝜆2
2
𝜆3
2
] → موند فندر
:مثال
𝐴 = [
0 1 0
0 0 1
−18 −27 −10
] → پذیر کنترل
𝐺(𝑆) =
1
𝑆3 + 10𝑆2 + 27𝑆 + 18
=
1
(𝑆 + 1)(𝑆 + 3)(𝑆 + 6)
(𝑆 + 1)(𝑆 + 3)(𝑆 + 6)
𝑉 = [
1 1 1
−1 −3 −6
1 9 36
] → ویژه بردار
(توان سطرآن توان بیشترباشد ماتریس ستون و سطر تعداد *هرچه
𝜆
می بیشتر ) ها
.شود
← (4 × 4)
توان
۳
:باشند تکراری ویژه مقادیر که زمانی
از کامل ست یک
بردارهای
ندارد وجود یا دارد وجود یا ویژه
.
𝜆1 = 𝜆2 → تکراری
𝜆3 = 𝜆4
𝜆1 → 𝜆1 = 𝜆2, 𝜆3
𝜆2
𝜆3 → 𝜆1 = 𝜆2 = 𝜆3](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-34-2048.jpg)
![35
مکرر ویژه مقادیر با که مستقل ویژه بردارهای تعداد
m
پوچ فضای بعد با برابر هستند ارتباط در
ماتر
یس
(𝜆𝐼 − 𝐴)
:یعنی است
𝑞1 = 𝑛 − 𝑟𝑎𝑛𝑘(𝜆𝐼 − 𝐴)
داریم یافته تعمیم ویژه بردار
𝑞 ≠ 𝑚
نداریم یافته تعمیم ویژه بردار
𝑞 = 𝑚
1 ≤ 𝑞𝑖 ≤ 𝑚𝑖
معکوس ماتریس محاسبه مراحل
:
معکوس ماتریس → 𝑑𝑒𝑡 → 𝑚𝑖𝑛𝑜𝑟 → 𝐶𝑜𝑓𝑎𝑐𝑡𝑜𝑟 → 𝐶𝑇
→ 𝑎𝑑𝑗 → 𝑖𝑛𝑣𝑒𝑟𝑠𝑒
:پوچ فضای ادامه
𝑛𝑢𝑙𝑙𝑠𝑝𝑎𝑐𝑒(𝜆𝐼 − 𝐴) → (𝜆𝑖𝐼 − 𝐴)𝑥𝑖 = 0
𝐴 = [
0 𝜆1 𝜆4
0 𝜆2 𝜆5
0 𝜆3 𝜆6
] و یا 𝐴 = [
0 0 0
𝜆1 𝜆2 𝜆3
𝜆4 𝜆5 𝜆6
]
فول ماتریس
می صفر غیر دترمینالش رنک
مستقل سطر سه یعنی .شود
.داریم
مثال
:
[
1 0 2
0 1 0
0 0 1.5
] → 𝑑𝑒𝑡 = 1.5
.است رنک فول شده صفر غیر دترمینالش چون
هر
می نظر در ستونی را رنک .هستند هم از مستقل ستون سه
.گیریم
پوچ فضای بعد
:
پوچ فضای بعد = 𝑛 − 𝑟
ماتریس ستون
𝑑𝑒𝑡 = 0 𝑑𝑒𝑡 = 0
رنک
ها ستون](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-35-2048.jpg)
![36
پوچ فضای
:
𝐴𝑥 = 0
𝐴𝑥 = 𝜆𝑥 → (𝐴 − 𝜆𝐼)𝑥 = 0
*
.داریم پوچ فضای به نیاز حاال
(𝑛 − 𝑟)
.است
:کنید حساب را ویژه بردارهای ویژه مقادیر :مثال
•
روش
۱
𝐴 = [
0 1
−3 −4
]
𝐺(𝑆) =
1
𝑆2 + 4𝑆 + 3
→ (𝑆 + 3)(𝑆 + 1)
ویژه مقادیر
𝑆1 = −3 𝑆2 = −1
فندرموند روش به ویژه بردار
𝑉 = [
1 1
−3 −1
]
•
روش
2
:گوسی روش
𝜆2
− 𝑡𝑟𝑎𝑐𝑒|𝐴|𝜆 + 𝑑𝑒𝑡𝐴 = 0
𝑡𝑟𝑎𝑐𝑒|𝐴| = اصلی قطر عناصر جمع → 0 + (−4) = −4
det 𝐴 = 0 − (−3) = 3
∆(𝜆) = 𝜆2
− (−4)𝜆 + 3 → 𝜆2
+ 4𝜆 + 3 = 0
•
روش
۳
𝜆2
+ 𝑏𝜆 + 𝑎 = 0 → ∆(𝜆) = 𝜆2
+ 4𝜆 + 3 = 0
•
روش
4
گرامر
|𝜆𝐼 − 𝐴| = 0
|
𝜆 −1
3 𝜆 + 4
| = 0](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-36-2048.jpg)
![37
(𝜆)(𝜆 + 4) − (−3) = 0 → 𝜆2
+ 4𝜆 + 3 = 0
(𝜆 + 3)(𝜆 + 1) = 0 → 𝜆1 = −1 𝜆1 ≠ 𝜆2
𝜆2 = −3
𝐴 = [
0 1
−3 −4
] → اگر 𝐴 = [
𝑎 𝑏
𝑐 𝑑
]
→ 𝑎𝑑𝑗(𝐴) = [
𝑑 −𝑏
−𝑐 𝑎
]
→ 𝜆𝐼 − 𝐴 = [
𝜆 −1
3 𝜆 + 4
] → 𝑎𝑑𝑗(𝜆𝐼 − 𝐴) → [
𝜆 + 4 +1
−3 𝜆
]
rank
می محاسبه ماتریس این در را
کنیم
:نکته
rank
از را
𝜆𝐼 − 𝐴
آو می بدست
از را ویژه بردار .رید
𝑎𝑑𝑗(𝜆𝐼 − 𝐴)
𝐴−1
=
1
|𝐴|
𝑎𝑑𝑗(𝐴) : اینورس برای
ویژه بردار برای
:
(𝑎𝑑𝑗) = 𝐶𝑇
روش حل ادامه
(4)
:
𝑟𝑎𝑛𝑘 → 𝑟
بعد فضای پوچ = 0 → 𝑛 − 𝑟 = 2 − 2 = 0
حال
𝜆
ها
در را
بردار و دهیم می قرار ها ستون
:کنیم می حساب را ویژه
توانیم می :نکته
𝜆
:کند نمی فرقی دهیم قرار درهرستون هارا
𝜆1 = −1 → 𝑉1 = [
𝜆 + 4
−3
] → [
3
−3
]
𝜆1 = −3 → 𝑉1 = [
𝜆 + 4
−3
] → [
1
−3
]
𝜆1 = −1 → 𝑉1 = [
1
𝜆
] → [
1
−1
]
𝜆2 = −3 → 𝑉1 = [
1
𝜆
] → [
1
−3
]
شده محاسبه مقادیرویژه
هستند مستقل سطرها
→ 𝑉 = [
3 1
−3 −3
]
بردارویژه
→ 𝑉 = [
1 1
−1 −3
]
بردارویژه](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-37-2048.jpg)
![38
کنید پیدا را زیر ماتریس ی ویژه های بردار و ویژه مقادیر :مثال
:
𝐴 = [
1 2
−2 −3
]
مرحله
1
:
اول روش → |𝜆𝐼 − 𝐴| = 0 → [
𝜆 − 1 −2
2 𝜆 + 3
]
(𝜆 − 1)(𝜆 + 3) − (−4) = 0 → 𝜆2
+ 3𝜆 − 𝜆 − 3 + 4 = 0
𝜆2
+ 2𝜆 + 1 = 0 → (𝜆 + 1)(𝜆 + 1) = 0
𝜆1 = −1 𝜆2 = −1 → شد برابر ها 𝜆
دوم روش → 𝜆2
− 𝑡𝑟𝑎𝑐𝑒(𝐴)𝜆 + 𝑑𝑒𝑡(𝐴) = 0
𝜆2
− (1 − 3)𝜆 + (−3) − (−4) = 0
𝜆2
+ 2𝜆 + 1 = 0 → (𝜆 + 1)(𝜆 + 1) = 0
مرحله
2
:
𝜆𝐼 − 𝐴 = [
𝜆 − 1 −2
2 𝜆 + 3
]
𝑟𝑎𝑛𝑘
→ 𝜆 = −1 → [
−1 − 1 −2
2 −1 + 3
]
Rank=1
مرحله
3
:
𝑞 = 𝑛 − 𝑟𝑎𝑛𝑘(𝜆𝐼 − 𝐴)
𝑞 = 2 − 1 = 1 → 𝑞 = 1 → 𝑉1 = ویژه بردار یک
𝑉2 = یافته تعمیم ویژه بردار یک
𝜆𝐼 − 𝐴 = [
𝜆 − 1 −2
2 𝜆 + 3
] → 𝑎𝑑𝑗(𝜆𝐼 − 𝐴) = [
𝜆 + 3 2
−2 𝜆 − 1
]
→ [
𝜆 + 3 2
−2 𝜆 − 1
] = [
−1 + 3 2
−2 −1 − 1
] = [
2 2
−2 −2
]
𝑉1 = [
2
−2
]
ویژه بردار
→ است یکی چون نوشت توان نمی را 𝑉2پس
حاال → [
𝜆 + 3 2
−2 𝜆 − 1
] → گیریم می مشتق ستون یک از](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-38-2048.jpg)
![39
→
𝑑
𝑑𝑦
[
𝜆 + 3
−2
] = [
1
0
] → یافته تعمیم ی ویژه بردار
𝑉2 = [
1
0
] → → 𝑉 = [
2 1
−2 0
]
هردو اگر
باید نبود یکی ستون
که بگیریم مشتق ستونی از
𝑉1
ایم نوشته را
.
:یافته تعمیم ی ویژه بردار دیگر های روش
𝐴𝑥 = 0 → 𝑉1
𝐴𝑉2 = 𝑉1 → 𝑉2
:مثال
𝐴 = [
4 2 1
0 6 1
0 −4 2
]
→ |𝜆𝐼 − 𝐴| = 0 [
𝜆 − 4 −2 −1
0 𝜆 − 6 −1
0 4 𝜆 − 2
]
[
𝜆 − 4 −2 −1
0 𝜆 − 6 −1
0 4 𝜆 − 2
] → [
𝑎 𝑏 𝑐
0 𝑑 𝑒
0 0 𝑓
] = 𝑎 |
𝑑 𝑒
0 𝑓
| − 𝑏 |
0 𝑒
0 𝑓
| + 𝑐 |
0 𝑑
0 0
| = 0
→ 𝑎(𝑑𝑓 − 0) − 𝑏(0 − 0) + 𝑐(0 − 0) = 𝑎𝑑𝑓
[
𝜆 − 4 −2 −1
0 𝜆 − 6 −1
0 4 𝜆 − 2
] = 0 → (𝜆 − 4) |
𝜆 − 6 −1
4 𝜆 − 2
| − (−2) |
0 1
0 𝜆 − 2
| + (−1) |
0 𝜆 − 6
0 4
|
= (𝜆 − 4)[(𝜆 − 6)(𝜆 − 2) − (−4)] + 0 + 0 = 0
(𝜆 − 4)[𝜆2
− 2𝜆 − 6𝜆 + 12 + 4] = (𝜆 − 4)(𝜆 − 4)2
= 0
𝜆1 = 4
𝜆2 = 4
𝜆3 = 4
ویژه بردار
𝑉2](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-39-2048.jpg)
![40
|𝜆𝐼 − 𝐴| = [
𝜆 − 4 −2 −1
0 𝜆 − 6 −1
0 4 𝜆 − 2
] = [
0 −2 −1
0 −2 −1
0 4 2
]
rank=1
𝑞 = 𝑛 − 𝑟 = 3 − 1 = 2
1 مستقل هویژ بردار
2 یافته تعمیم بردار
𝑎𝑑𝑗(𝜆𝐼 − 𝐴) → 𝐶 = (−1)𝑖+𝑗
= 𝑀𝑖𝑗 ….
𝑀11 = |
𝜆 − 6 −1
4 𝜆 − 2
| = (𝜆 − 6)(𝜆 − 2) − (−4) = 𝜆2
− 8𝜆 + 16 = (𝜆 − 4)2
𝑀12 = |
0 −1
0 𝜆 − 2
| = 0
𝑀13 = |
0 𝜆 − 6
0 4
| = 0
𝑀21 = |
−2 −1
4 𝜆 − 2
| = (−2𝜆 + 4) − (−4) = −2𝜆 + 8
𝑀22 = |
𝜆 − 4 −2
0 𝜆 − 2
| = (𝜆 − 4)(𝜆 − 2) = 𝜆2
− 6𝜆 + 8
𝑀23 = |
𝜆 − 4 −2
0 4
| = (𝜆 − 4)(4) − 0 = 4𝜆 − 16
𝑀31 = |
−2 −1
𝜆 − 6 −1
| = 2 − (−1) − 0 = 𝜆 − 4
𝑀32 = |
𝜆 − 4 −1
0 −1
| = −𝜆 + 4
𝑀33 = |
𝜆 − 4 −2
0 𝜆 − 6
| = (𝜆 − 4)(𝜆 − 6) = 𝜆2
− 10𝜆 + 24
𝐶 = [
(−1)2(𝜆 − 4)2 (−1)3
0 (−1)4
0
(−1)3(−2𝜆 + 8) (−1)4(𝜆 − 4)(𝜆 − 2) (−1)5(4𝜆 − 16)
(−1)4(𝜆 − 4) (−1)5(−𝜆 + 4) (−1)4(𝜆 − 4)(𝜆 − 6)
]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-40-2048.jpg)
![41
𝐶 = [
(𝜆 − 4)2
0 0
2𝜆 − 8 (𝜆 − 4)(𝜆 − 2) −4𝜆 + 16
𝜆 − 4 𝜆 − 4 (𝜆 − 4)(𝜆 − 6)
]
𝐶𝑇
= [
(𝜆 − 4)2
2𝜆 − 8 𝜆 − 4
0 (𝜆 − 4)(𝜆 − 2) 𝜆 − 4
0 −4𝜆 + 16 (𝜆 − 4)(𝜆 − 6)
]
𝑎𝑑𝑗(𝜆𝐼 − 𝐴) = 𝐶𝑇
= [
(𝜆 − 4)2
2𝜆 − 8 𝜆 − 4
0 (𝜆 − 4)(𝜆 − 2) 𝜆 − 4
0 −4𝜆 + 16 (𝜆 − 4)(𝜆 − 6)
]
𝑎𝑑𝑗(𝜆𝐼 − 𝐴) 𝜆=4 = [
0 0 0
0 0 0
0 0 0
]
𝑑
𝑑𝜆
= 𝑎𝑑𝑗(𝜆𝐼 − 𝐴) = [
2𝜆 − 8 2 1
0 2𝜆 − 6 1
0 −4 2𝜆 − 10
]
→ [
0 2 1
0 −2 1
0 −4 −2
] → 𝑉1 ی هویژ بردار
1
2
𝑑2
𝑑𝜆2
(𝑎𝑑𝑗(𝜆𝐼 − 𝐴)) =
1
2
[
2 0 0
0 2 0
0 0 2
] → [
1 0 0
0 1 0
0 0 1
]
که ستونی از حتما
𝑉1
ستون همان دوم مشتق بعداز کردیم انتخاب را
𝑉2
ی ویژه بردار وبرای .شود می
𝑉3
.کنیم انتخاب را ستون کدام کند نمی فرقی
[
1 0 0
0 1 0
0 0 1
] → 𝑉 = [
1 0 0
0 1 0
0 0 1
]
: یافته تعمیم ی ویژه بردار ی محاسبه برای کلی فرمول
1
(𝑚𝑖 − 1)!
{
𝑑𝑚𝑖−1
𝑑𝑚𝑖−1
[𝑎𝑑𝑗(𝜆𝐼 − 𝐴)]} → 𝜆 = 𝜆𝑖
𝑟𝑎𝑛𝑘 = 1
𝑉3
𝑉2](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-41-2048.jpg)
![42
)دال ُ
(م همانندی مشابه ماتریس
ماتریس
مهم از یکی :مشابه
در ویژه بردار و ویژه مقادیر حوزه در جبرخطی های قسمت ترین
قطری
.است آن ویژه بردارهای توسط ماتریس یک سازی
مجزا {𝜆1 ≠ 𝜆2 ≠ 𝜆3 ⟹ 𝑣−1
𝐴𝑣 = Λ =
𝑣 = 𝑆 ⟹ 𝑣−1
𝐴𝑣 = Λ یا 𝜆
𝑆 = ویژه بردارهای ماتریس
Λ = ویژه مقادیر ماتریس (است جردن یا قطری (ماتریس
ماتری :مهم
معکوس س
پذیر
M
:بگیرید نظر در را 𝑀 = 𝑣 = 𝑆
𝐵 = 𝑀−1
𝐴𝑀|𝐵 = 𝑀𝐴𝑀−1
⟶ 𝐴 = 𝑀𝐵𝑀−1
A و B می انجام جابجایی پس است مشابه
.شود
ماتریس در که همانندی تبدیل
قطری
می انجام سازی
می دال ُ
م را شود
.گوییم
ویژه مقادیر اگر
می باشند مساوی ها
ماتریس گوییم
ه مشابه ها
س
.تند
نمی تغییر مستقل ویژه بردارهای
.کند
{𝐵 = 𝑀−1
𝐴𝑀
𝐵 = 𝑀𝐴𝑀−1}دارند جابجایی خاصیت
:متغیر تغییر روش
𝐴𝑥 = 𝜆𝑥 ⟹ 𝐴جای به ⟹ جدید سیستم ⟹𝑀−1
𝑥𝑀𝐵𝑀−1
𝑥𝑀−1
𝑥 = 𝜆𝑥
ضرب 𝑀−1
در طرفین ⟹B𝑀−1
𝑥 = 𝜆𝑀−1
𝑥 ⟹ 𝐵𝑥𝑛 = 𝜆𝑥𝑛 = 𝑥𝑛 = 𝑀−1
𝑥𝑛 ⟹
مهم ⟹ 𝑀−1
𝑥 = 𝑥𝑛 𝑀−1
. 𝑀 = 𝐼 = 1 = [
1 0
0 1
]
ویژه بردار دیگر
حل
x
نیست
حل
x
1
-
M
می
تغییر باشد
می
کند](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-42-2048.jpg)
![43
همانندی تبدیل
(Q)
رابطه :
مربعی ماتریس دو بین ای
A
و
B
فرم به
𝐵 = 𝑄−1
𝐴𝑞
ماتریس برای
غیر های
تکی
ان
(nonsingular)
ماتریس کهخاصیحالتدرباشد غیرصفرآن دترمینانیا رنک فولیا
B
تکه
بدیل
می قطبی ماتریس یک به
نقش دال ُ
م ماتریس شود
q
می بازی را
.کند
اینجا در فقط
Q
است صورت این به
𝑄یا𝑞 = [
⋮ ⋮ ⋮
𝑣1 𝑣2 𝑣3
⋮ ⋮ ⋮
]
نیست نیاز دیگر طراحیبرای همانندیتبدیل در
Q
کنترلو بود ناپذیر (کنترل باشد ویژهبردار
)شود پذیر
برداره که حالتی در
پایه تشکیل و باشند عمود یکدیگر بر متقابل بصورت ویژه ای
در دهند متعامد های
ماتریس در تعامد خاصیت طبق اینصورت
این به نیازی دیگر داشت خواهیم ها
.نیست ورس
𝑄𝑇
= 𝑄−1
Λ = 𝑄𝑇
𝐴𝑄
قطری برای همانندی تبدیل همه آیا است همانندی تبدیل یک دال ُ
م ماتریس هر
بک سازی
می ار
رود؟
می بکار پذیر کنترل و پذیر رویت فرم به تبدیل برای خیر
ویژه بردارهای از سازی قطری برای فقط و رود
می استفاده
.کنیم
به حالت گذر ماتریس )مثال
.آورید دست به را زیر ماتریس برای همیلتون کیلی روش
:همیلتون کیلی روش به حل الگوریتم
1
ماتریس ویژه مقادیر )
A
.آورید بدست را
2
حل به نیاز باشند مجزا ویژه مقادیر اگر )
n
داشت خواهیم زیر همزمان معادله
۳
محاسبه نیز را مستقل معادالت بودند تکراری ویژه مقادیر اگر )
.کنید
4
.کنید جایگزین زیر معادله در را آمده بدست مجهول ضرایب )
:همیلتون کیلی روش به انتقال ماتریس](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-43-2048.jpg)
![44
:مثال
𝐴 = [
1 1
0 1
]
۲ × ۲ =∝0+∝1 𝜆1
3 × 3 =∝0+∝1 𝜆1 +∝1 𝜆1
2
1) 𝜆2
− 𝑡𝑟𝑎𝑐𝑒𝐴
𝜆 + 𝑑𝑒𝑡𝐴 ⟶ 𝜆2
2𝜆 + 1
⏟
(𝜆−1)(𝜆−1)
= 0 {
𝜆1 = +1
𝜆2 = +1
𝑓(𝜆1) = 𝑒𝜆1𝑡
= 𝑒𝑡
=∝0+∝1⟶∝0= 𝑒𝑡
− 𝑡𝑒𝑡
⟵ 𝜆به نسبت مشتق
𝑑𝑡
𝑑𝜆
[𝑓(𝜆2)] =
𝑑
𝑑𝜆
𝑒𝜆2𝑡
=∝0+∝1⟹ 𝑡𝑒𝜆1𝑡
+ 𝑡𝑒𝑡
=∝0+∝1
𝑑𝑡
𝑑𝜆
[𝑓(𝜆2)] =
𝑑
𝑑𝜆
𝑒𝜆2𝑡
=
𝑑
𝑑𝜆
(𝑎0 + 𝑎1 + 𝜆1) ⟶ 𝑡𝑒𝑡
=∝1
.کنید تحلیل مدال فرم به زیررا سیستم که کنید پیدا همانی تبدیل )مثال
[
𝑥̇1
𝑥̇2
𝑥̇3
] = [
−2 −2 0
0 0 1
0 −3 −4
] [
𝑥1
𝑥2
𝑥3
] + [
1 0
0 1
1 1
] 𝑢
ازای به
.است سختی کار .کنید محاسبه را مجهول یک معادله دستگاه یک باید ویژه هرمقدار
𝐴𝑥 = 𝜆𝑥
(𝜆𝐼 − 𝐴) 𝑥 = 0
روش به حل
adj
:
𝑎𝑑𝑗 [
𝑎 𝑏
𝑐 𝑑
] = [
𝑑 −𝑏
−𝑐 𝑎
]
𝑉1
= [
𝑥1
𝑥2
𝑥3
]
𝑉2
= [
𝑥1
𝑥2
𝑥3
]
𝑉3
= [
𝑥1
𝑥2
𝑥3
]
پوچ فضای
→
ماتریس برای2 × 2](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-44-2048.jpg)
![45
𝑎𝑑𝑗3×3 = 𝐶𝑇
2 مرحله
→ (𝜆𝐼 − 𝐴) → [
𝜆 + 2 2 0
0 𝜆 −1
0 3 𝜆 + 4
]
3 مرحله → (−1)𝑖+𝑗
𝑀𝑖𝑗 → 𝑑𝑒𝑡𝑀11 = [
𝜆 −1
3 𝜆 + 4
] = 𝜆2
+ 4𝜆 + 3 = (𝜆 + 1)(𝜆 + 3)(−1)2
1 ویژه مقادیر مهم → 𝜆 + 2 |
𝜆 −1
3 𝜆 + 4
| − 2 |
0 1
0 𝜆 + 3
| + 0 = 0
→ (𝜆 + 2)(𝜆 + 1)(𝜆 + 3) = 0 → 𝜆1 = −2 𝜆2 = −1 𝜆3 = −3
3 مرحله ادامه → 𝑑𝑒𝑡𝑀12 = [
0 −1
0 𝜆 + 4
] = 0
𝑑𝑒𝑡𝑀13 = [
0 𝜆
0 3
] = 0
𝑑𝑒𝑡𝑀21 = [
2 0
3 𝜆 + 4
] = 2𝜆 + 8
𝑑𝑒𝑡𝑀22 = [
𝜆 + 2 0
0 𝜆 + 4
] = (𝜆 + 2)(𝜆 + 4)
𝑑𝑒𝑡𝑀23 = [
𝜆 + 2 2
0 3
] = 3𝜆 + 6
𝑑𝑒𝑡𝑀31 = [
2 0
𝜆 −1
] = −2
𝑑𝑒𝑡𝑀32 = [
𝜆 + 2 0
0 −1
] = −𝜆 − 2
𝑑𝑒𝑡𝑀33 = [
𝜆 + 2 3
0 𝜆 + 4
] = 𝜆2
+ 2𝜆
𝐶 = [
(𝜆 + 1)(𝜆 + 3) 0 0
−2𝜆 − 8 (𝜆 + 2)(𝜆 + 4) −3𝜆 − 6
−2 𝜆 + 2 𝜆2
+ 2𝜆
] →
𝑎𝑑𝑗 = 𝐶𝑇
= [
(𝜆 + 1)(𝜆 + 3) −2𝜆 − 8 −2
0 (𝜆 + 2)(𝜆 + 4) 𝜆 + 2
0 −3𝜆 − 6 𝜆2
+ 2𝜆
] → [
2
𝜆 + 2
𝜆2
+ 2𝜆
]
𝑉1 = [
−2
−1 + 2
(−1)2
+ 2(−1)
] = [
−2
1
−1
] 𝜆1 = −1](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-45-2048.jpg)
![46
𝑉2 = [
−2
−2 + 2
(−2)2
+ 2(−2)
] = [
−2
0
0
]
𝑉3 = [
−2
−3 + 2
(−3)2
+ 2(−3)
] = [
−2
−1
3
]
𝑉 = [
−2 −2 −2
0 1 −1
0 −1 3
]
𝐴𝑛 = 𝑀−1
𝐴𝑀 = 𝐽𝑛
𝐵𝑛 = 𝑀−1
𝐵
𝐶𝑛 = 𝐶𝑀
:نکته
𝑀−1
2×2 =
1
𝑑𝑒𝑡|𝐴|
𝑎𝑑𝑗𝑀 =
1
𝑎𝑑 − 𝑏𝑐
[
𝑑 −𝑏
−𝑐 𝑎
]
𝑀 = 𝑉 → است ویژه بردار ماتریس → 𝑀 → 𝑀−1
→ 𝑉 = 𝑉−1
𝑀−1
=
𝐶𝑇
𝑑𝑒𝑡𝑀
→ 𝑉 = [
−2 −2 −2
0 1 −1
0 −1 3
]
𝑑𝑒𝑡𝑀 = −2 |
1 −1
−1 3
| + 2 |
0 −1
0 3
| − 2 |
0 1
0 −1
| = −4 = دترمینان
𝑀11 = [
1 −1
−1 3
] = 3 − 1 = 2
𝑀12 = [
0 −1
0 3
] = 0
𝑀13 = [
0 1
0 −1
] = 0
𝑀21 = [
−2 −2
−1 3
] = −6 − (2) = −8
𝑀22 = [
−2 −2
0 3
] = −6
𝑀23 = [
−2 −2
0 −1
] = 2
𝑀31 = [
−2 −2
1 −1
] = 2 + 2 = 4
𝜆2 = −2
𝜆3 = −3](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-46-2048.jpg)
![47
𝑀32 = [
−2 −2
0 −1
] = 2
𝑀33 = [
−2 −2
0 −1
] = −2
𝐶 = [
2 0 0
8 −6 −2
4 −2 −2
] → 𝐶𝑇
= [
2 8 4
0 −6 −2
0 −2 −2
]
𝑀−1
=
1
−4
[𝐶𝑇]
𝐴𝑛 =
1
−4
[
2 8 4
0 −6 −2
0 −2 −2
] [
−2 −2 0
0 0 1
0 −3 −4
] [
−2 −2 −2
0 1 −1
0 −1 3
]
= [
−4 −4 − 12 8 − 16
0 6 6 + 8
0 6 −2 + 8
] [
−2 −2 −2
0 1 −1
0 −1 3
]
= [
8 8 − 16 + 8 8 + 16 − 24
0 6 − 2 −6 + 6
0 6 − 6 −6 + 18
]
𝐴𝑛 =
1
−4
[
8 0 0
0 4 0
0 0 12
] = [
−2 0 0
0 −1 0
0 0 −3
]
𝐵𝑛 =
1
−4
[
2 8 4
0 −6 −2
0 −2 −2
] [
1 0
0 1
1 1
] = [
6 12
−2 −8
−3 −4
]
𝐵𝑛 =
[
−
1
2
−2 −1
0
3
2
1
2
0
1
2
1
2 ]
[
1 0
0 1
1 1
] =
[
−
1
2
− 1 −2 − 1
1
2
3
2
+
1
2
1
2
1
2
+
1
2 ]
𝐵𝑛 =
[
−
3
2
−3
1
2
4
2
1
2
1 ]
= [
−1.5 −3
0.5 2
0.5 1
]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-47-2048.jpg)
![48
:همانند تبدیل مثال ادامه
𝑀−1
=نیازداریم برای ⇒ 𝐵𝑛 = 𝑀−1
B ولی
𝑀 = نیازداری برای
م ⇒ 𝐶𝑛 = 𝐶𝑀
Λالندابزرگ ⇒ 𝛬 = 𝐴𝑛 = 𝑀−1
𝐴𝑀 = 𝐽𝑛
𝜆1 ≠ 𝜆2 ≠ 𝜆3
Jماتریس =Λ=[
𝜆1 𝜊
𝜆2
𝜊 𝜆3
]
مات
ریس
j
.تواتیدبنویسید می راراحت
.پایداراست سیستم که فهیم می ازمقادیرویژه
محور چپ سمت قطب
𝑗𝜔
.پایداراست سیستم
𝑗𝜔
R
3
-
۲
-
۱
-
.کنید رامحاسبه حالت انتقال ماتریس
STM=?](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-48-2048.jpg)
![49
*
الپالس درفضای
x
:شود می نوشته بزرگ صورت هارابه
میسیون روش بامحاسبه
:
1
𝑆+3
=
⇒
𝑋2(𝑆)
𝑈(𝑆)
روش
SFG
[ 𝑠 + 3]
U=𝑥2(𝑠)
⇒
𝑥1(𝑠)
𝑥2(𝑠)
=
1
𝑠
U(s)=3[𝑅 − (𝑥1−𝑥2)]
𝑋2(𝑆)
𝑈(𝑆)
⇒ 𝑈(𝑆) = 𝑋2(𝑆) = [𝑆 + 3]
⇒
وسطین طرفین
⇒𝑥2 + 3𝑥2 = 3𝑟 − 3𝑥1 + 3𝑥2] ⇒ {
𝑥1
̇ = 𝑥2
𝑥2
̇ = 3𝑥1 + 3𝑟
زمان درحوزه بردن
𝑥̇1 = 𝑥2
⇒A=[
0 1
−3 0
]⇒⤻∆(λ)=𝜆2
+3=0{
𝜆1 = +√3𝐽
𝜆2 = −√3𝐽
⇔
ʆ−1{(𝑆𝐼 − 𝐴)−1}=ʆ−1
{
𝐶𝑇(𝑆𝐼−𝐴)
det (𝑆𝐼−𝐴)
}⇒
𝐶𝑇(1,2)
det (𝑆𝐼−𝐴)
روش
1
✓ ⇒(SI-A) ⇒
1
𝑆2+3
[
𝑆 +1
−3 𝑆
] ⇒ ʆ −1
=
1
𝑆2+3
𝐿−1
{
1
𝑆2+3
} =?
ی
:ادآوری
→ 𝐿−1
→ sin 𝑎𝑡
𝑎
𝑠2+𝑎2
𝑙−1
{
1×
√3
√3
𝑠2+(√3)2
} ⇒
1
√3
𝑠𝑖𝑛√3 ⇒
√3
3
𝑠𝑖𝑛√3𝑡
⇒
پس
1
3
⁄
√3
𝑠2+(√3)2
یادآوری
𝑠
𝑠2+𝑎2
→𝑙−1
cos 𝑎𝑡
محاسبه برای
An
به نیازی
𝑀−1
و
M
زیرا
برابر
با
.باشد می جردن ماتریس
یعنی یعنی جردن ماتریس
.باشد مقادیرمی وبقیه اصلی قطری روی مقادیرویژه
An=Jn
اما
محاسبه
Cn
ما
نیاز
( بردارویژه ماتریس به
M
یا
V
)
.نیازداریم](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-49-2048.jpg)
![50
𝐶𝑛 = 𝐶𝑀
برای
Bn
حتما
𝑀−1
و
𝑀
.کنید محاسبه راحساب
تبدیل تابع =
خروجی
ورودی
=
𝑋1
𝑋2
⇒
1
𝑆
⇔ [
𝜆 −1
+3 𝜆
] = 𝜆2
− (−3) = 𝜆2
+ 3
(𝜆𝐼 − 𝐴)
(𝑆𝐼 − 𝐴)
1
𝑑𝑒𝑡𝐴
[⤨
جابجا
] 2 روش
کنت
متغیرهاورودی رابطه پذیری رل
𝐵
ورودی
⇒ 𝐴
متغیر
:پذیر رویت
متغیرخروجی بین ارتباط
𝐶
خروجی
⇒ 𝐴
متغیر
U→𝐵
∑ →𝐶
𝑦
ورودی
A
𝑋 = 𝐴𝑥 + 𝐵𝑢
𝑦 = 𝐶𝑥 + 𝐷𝑢
ماتریس
D
ه
نداردپذیری ورویتپذیری درکنترل تفاوتی یچ
،
ورودی به خروجیکهاست نگاشت یکفقط
.کند می وصل
دیگربرویم اولیه شرایط یک به مشخص زمانی بازده دیگردریک اولیه شرایط ازیک:پذیر کنترل تعریف
جایی هاجابه اولی شرایط دربین بتوانیم یعنی
.بدهیم رخ](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-50-2048.jpg)
![51
:پذیر کنترل ماتریس
P=[𝐴 𝐴𝐵 𝐴2
𝐵]
:پذیر رویت تعریف
سیستم یک
LTI
باشد پذیرمی رویت
.
اگر
را حلت متغیرهای اولیه شرایط
به بتوان
یکتا صورت
از
در مربوط اطالعات
.نمود تعیین زمانی محدوده
یا خروجی یعنی
در حالت متغیرهای
شود رویت خروجی
یا
State
𝒙(𝟎) = 𝒙𝟎
u (t),y(t)
⤥
یعنی
observer
:پذیر رویت فرمول
𝛟=0=[
𝐶
𝐶𝐴
.
.
.
𝐶𝐴𝑛−1
]
Bn=𝑀−1
B
Cn=𝐶𝑀
:مثال
زیر سیستم پذیری کنترل
را
کنید بررسی
.
𝑋̇=[
0 1
−2 −3
] 𝑋 + [
0
1
]
پذیراست کنترل همراه فرم
𝐶𝐶𝐹 =
∆(𝜆) = 𝜆2
+ 3𝜆 + 2 = 0 {
(𝜆 + 1) = 0 ⇒ −1 = 𝜆1
(𝜆 + 2) = 0 ⇒ −2 = 𝜆2
M=[
1 1
𝜆1 𝜆2
] = [
1 1
−1 −2
] ⇒ 𝑀−1
=
1
𝑑𝑒𝑡𝑀
× 𝐶𝑇
ب
ردارویژه
𝑀−1
=
1
(−2)+1
[
−2 −1
+1 1
] = [
+1 +2
−1 −1
]
զ̇=𝛬զ+𝑀−1
𝐵 ⇒ 𝛬 = [
𝜆1 0
0 𝜆2
] = [
−1 0
0 −2
]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-51-2048.jpg)
![52
𝑀−1
𝐵 = [
2 1
−1 −1
] [
0
1
] = [
1
−1
] سیستم نداردپس صفری سطری هیچ= 𝑀−1
𝐵
پذیراست کنترل
ctrb
:
𝜆1 = 𝜆2 = 𝜆3
.است حالت پذیرکامل کنترل سیستم گوییم باشندمی خطی مستقل به سطرهانسبت این چنانچه
کنترل دیگربرای
به رویم می فقط پذیری
𝑀−1
𝐵
ماتریس به فقط کنیم می نگاه
Bn
:مثال
پذیری کنترل تشخیص
Bn=[
0
1
]ctrb نیست ×
Bn=[
0 0
1
0
1
1
] 𝑐𝑡𝑟𝑏 نیست ×
✓
Bn=[
1
1
] 𝑐𝑡𝑟𝑏 هست
تبدیل تابع ازروی پذیری پذیرورویت کنترل بررسی:مثال مهم *خیلی
G(S)=
𝑠+0.8
(𝑠+0.8)(𝑠+0.5)
⇒ 𝑥̇ = [
0 1
0.4 −1.3
] 𝑥 + [
0
1
] 𝑢 ∕ 𝑦[0.8 1]x
s)+(s+0.8)(s+0.5)⇒∆(s)=
𝑠2=1.3𝑠+0.4
⇔
)
∆
است ثابت همیشه
𝑥̇ = [
0 1
−0.4 −1.3
] 𝑥 + [
0
1
] 𝑢
پس
⇒
𝐺(𝑠)صورت
→ 𝑦 = [0.8 1]𝑥
شود می
تحقق
CCF
⇐
:پذیر کنترل تحقق فرم
𝑥̇ = [
0 1
−0.4 −1.3
] 𝑥 + [
0
1
] 𝑢
y= [0.8 1]𝑥
پذیر رویت تحقق فرم
OFC
:
𝑥̇ = [
0 −0.4
1 −1.3
] 𝑥 + [
0.8
1
] 𝑢
y= [0 1]𝑥
{
𝐴𝑇
+ 𝐶𝑇
𝑢
𝑦 = 𝐵𝑇](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-52-2048.jpg)
![53
پذیرباشد رویت پذیربه کنترل فرم بردن برای پس
𝐴𝑇
شود
B=𝐶𝑇
و
C=𝐵𝑇
می
.شود
CCF=𝑥̇ = [
0 1
−0.4 −1.3
] 𝑥 + [
0
1
] 𝑢 𝑦 = [0.8 1]𝑥
⇒
تحقق
برای پذیری رویت
پذیری کنترل فرم ماتریس
զ= [
𝐶
𝐶𝐴
] ⇒ [
0.8 1
−0.4 −0.5
] ستونی
رنک بررسی
⇒ 𝑟𝑎𝑛𝑘 = 1
⇒
تحقق
پذیر رویت
CA=[0.8 1] [
0 1
−0.4 −1.3
] = [−0.4 −0.5] پذیرنیست رویت سیستم
:
⇒
پذیر رویت تحقق P=[𝐵 𝐴𝐵] = [
0.8 −0.4
1 −0.5
]
بررسی
⇒ سطری رنک 𝑟𝑎𝑛𝑘 = 1
AB= [
0 0.4
1 −1.3
] [
0.8
1
] = [
0.4
−0.5
]. کنتر سیستم
پذیرنیس ل
ت
پذیر کنترل⇒[
0 1
−0 −0
] = 𝐴
B=
[
0
0
0
0
1]
C=[𝑏𝑛 − 𝑎𝑛𝑏0 𝑏𝑛−1 − 𝑎𝑛−1𝑏0 … . = 𝑏1 − 𝑎1𝑏𝑛] پذیر رویت
A=[
0 1
−0.4 −1.3
] 𝑋̇ = 𝐴𝑥 + 𝐵𝑢
B=[
0
1
] {
𝑥̇ = 𝐴𝑇
𝑥 + 𝐶𝑇
𝑢
𝑦 = 𝐵𝑇
𝑥 + 0
C=[0.8 1 ] {
𝑥̇ = [
0 −0.4
1 −1.3
] + [
0.8
1
] 𝑈
𝑦 = [0 1]𝑥](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-53-2048.jpg)
![54
اگرتمام
transpose
را
A.B,C
پذیر رویت کنیم
به
.آید می دست
[شود دقت حالت فضای به تبدیل ]تابع
𝐶 = [عددهای]
𝑃 = [𝐵 𝐴𝐵]
A=[
0 1
−0.4 −1.3
] [
0 −0.4
1 −1.3
]
C=[0 1] 𝐵 = [
0.8
1
]
1
.
تبدیل تابع نوشتن پذیری کنترل
2
.
نوشتن
C,B,A
۳
.
پذیری کنترل های تحقق محاسبه
P=[𝐵 𝐴𝐵 𝐴2
𝐵]
4
.
پذیر رویت تحقق ی محاسبه
զ= [
𝐶
𝐶𝐴
𝐶𝐴2
]](https://image.slidesharecdn.com/random-240324111940-86b2ed1c/75/slide-54-2048.jpg)