This document outlines the key topics of a course on modern control systems. It compares modern and classical control theories, describing modern control theory as applicable to nonlinear and time-varying systems using time-domain and frequency-domain approaches, while classical control theory is only applicable to linear time-invariant single-input single-output systems using frequency-domain approaches. It also describes open-loop and closed-loop control systems, and mathematical modeling of control systems using state-space representations. Examples of modeling mechanical and electrical systems are provided.
![Mathematical Modeling of Control
Systems. Modern Vs. Classical control Systems Open-Loop Vs. Closed-Loop Control Systems. Mathematical M
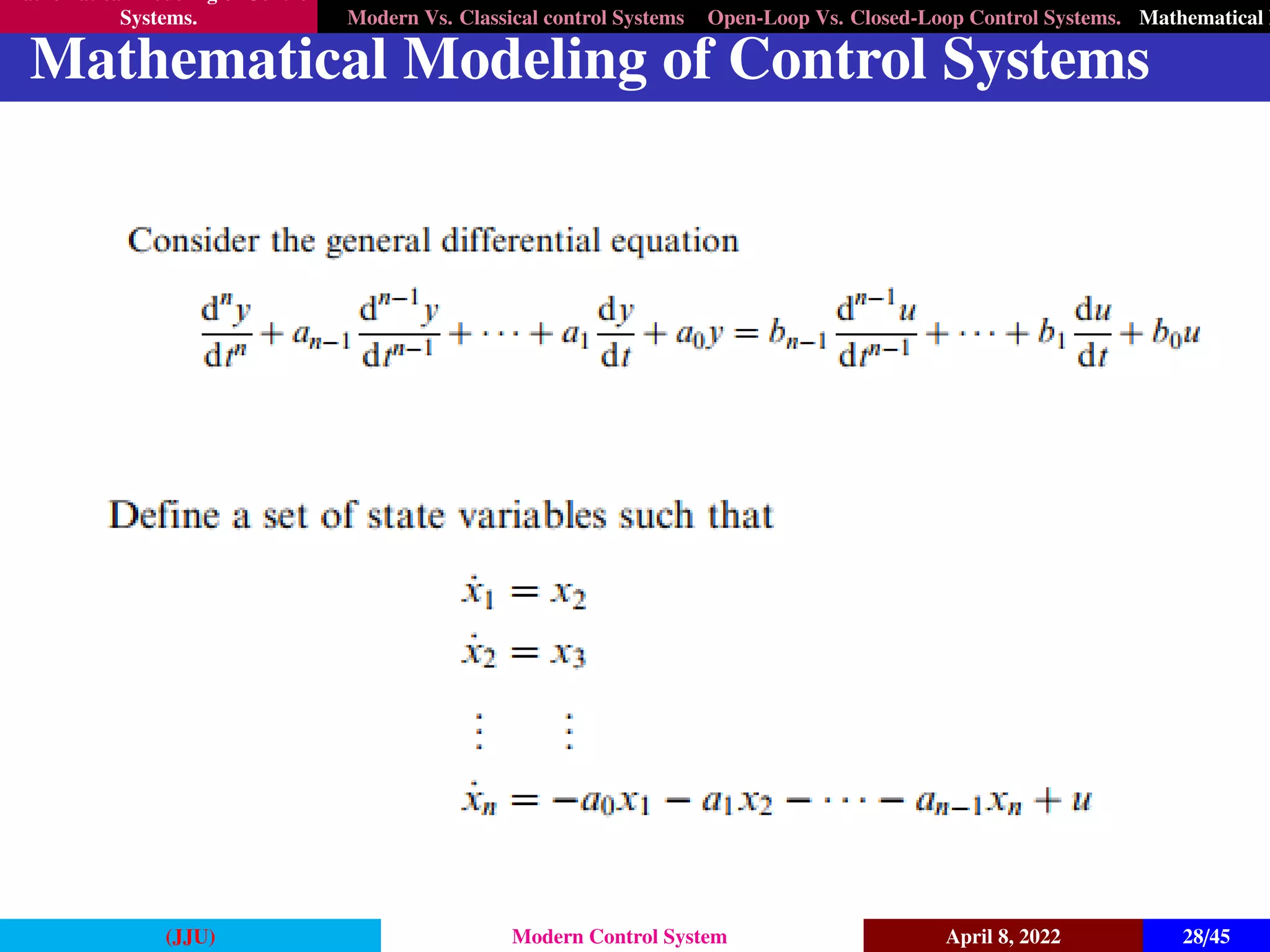
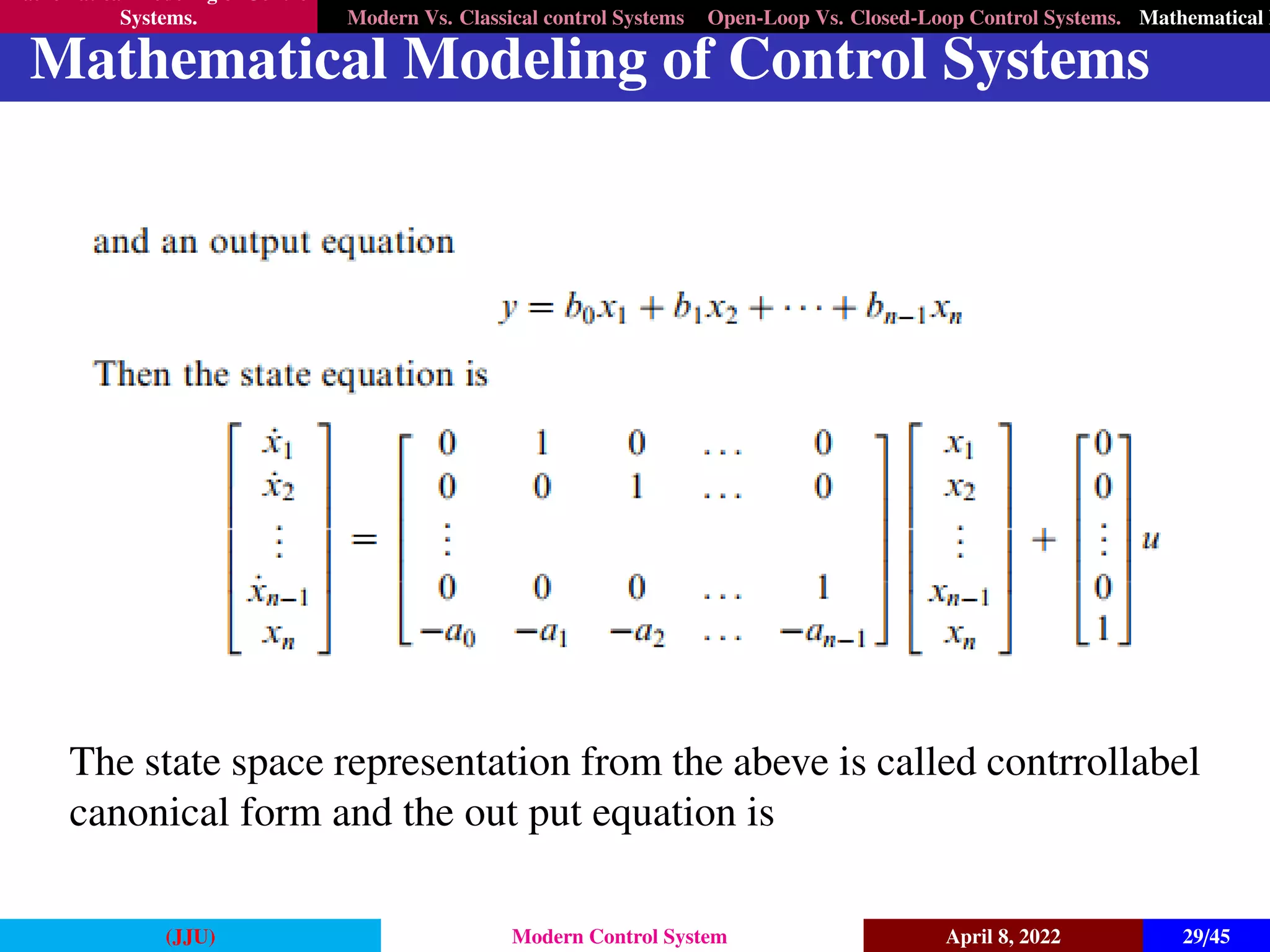
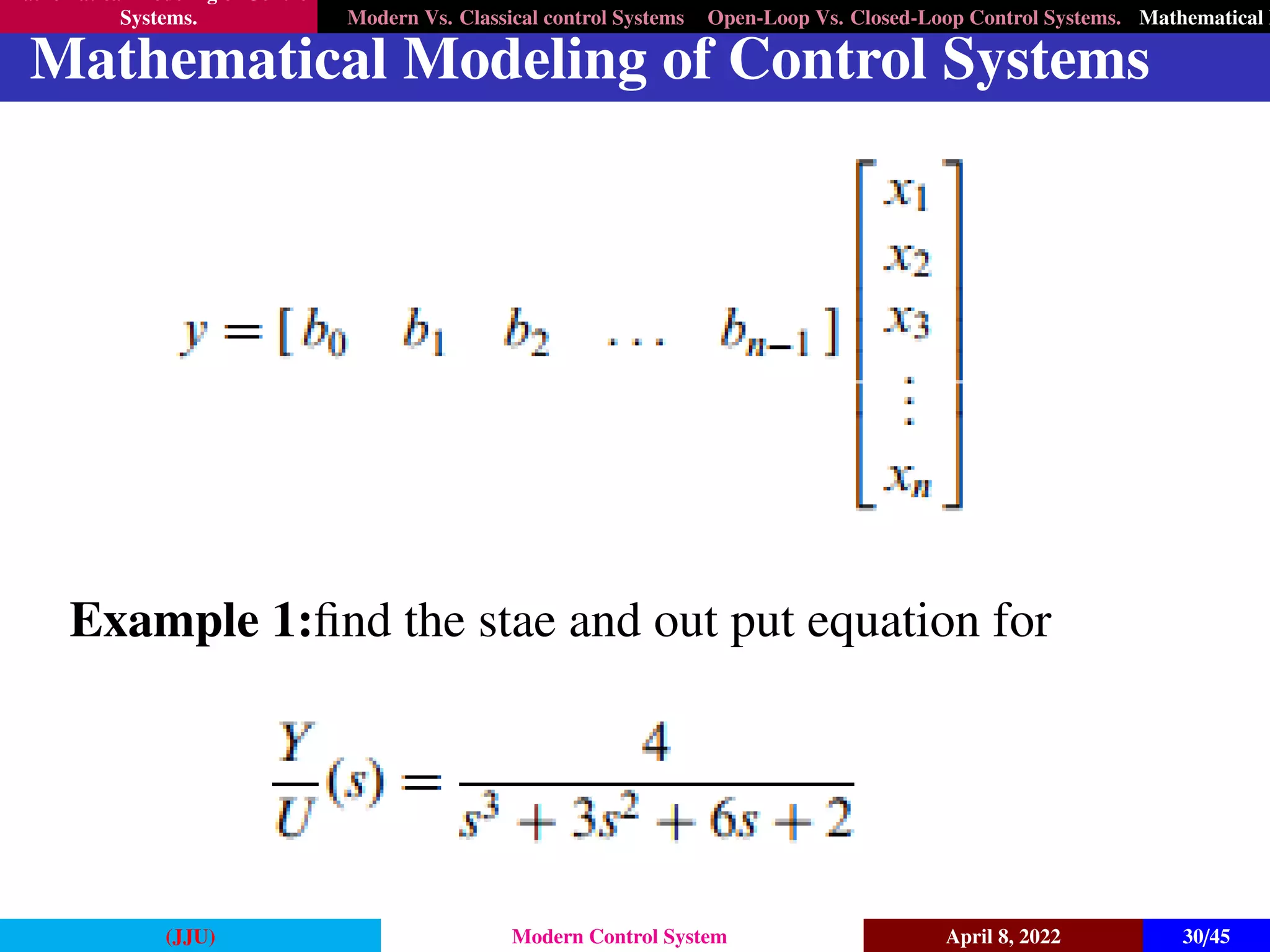
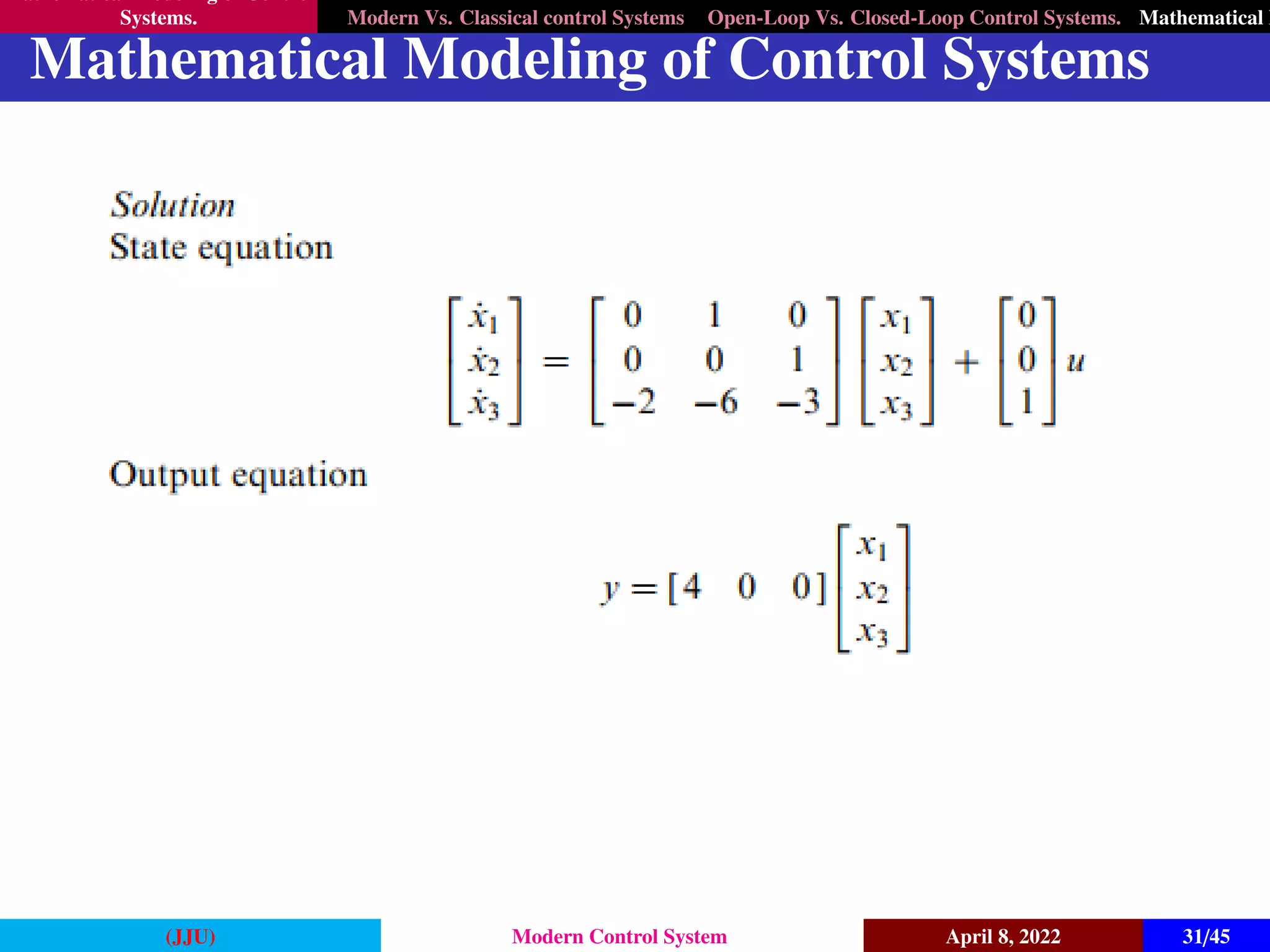
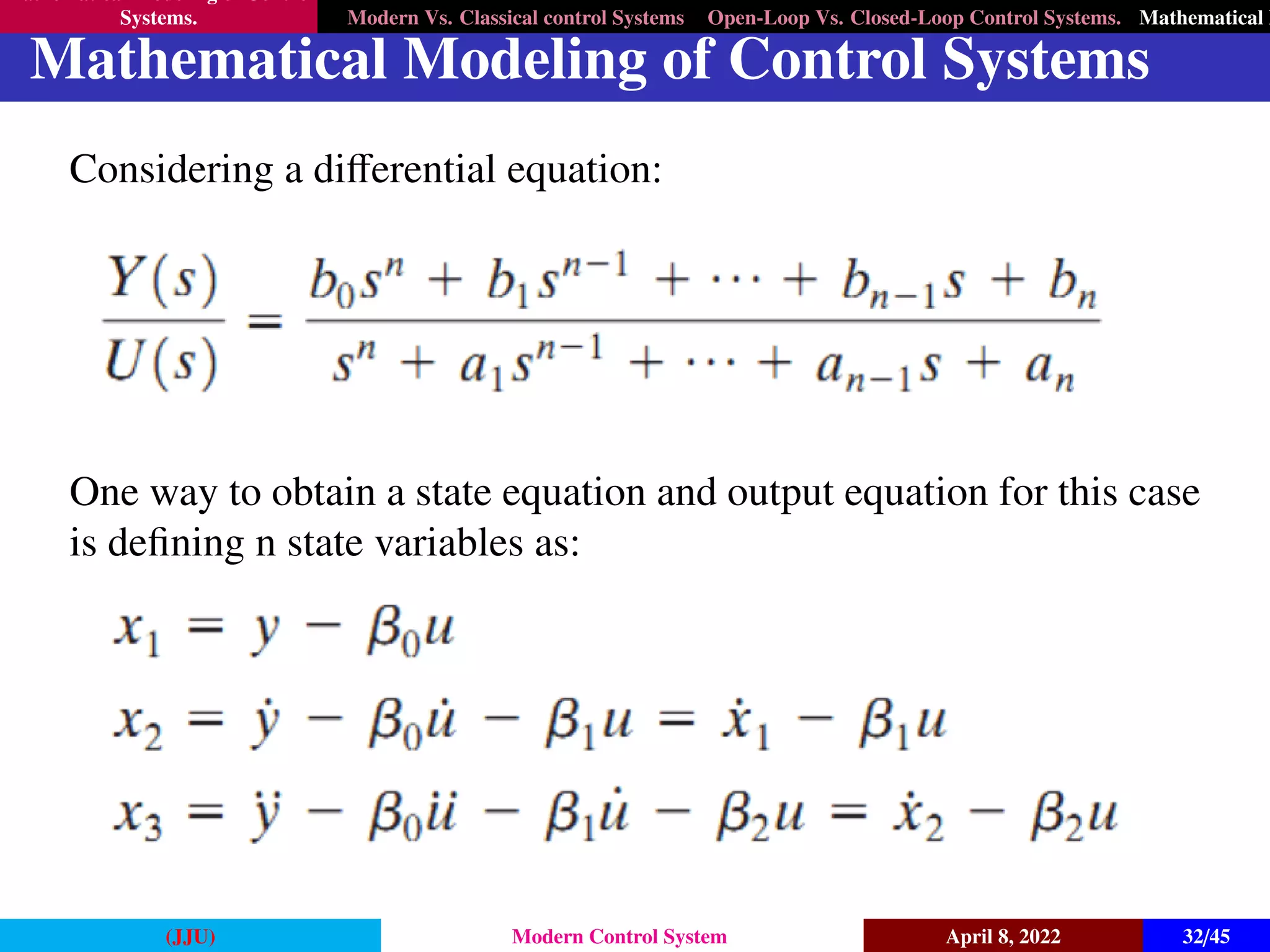
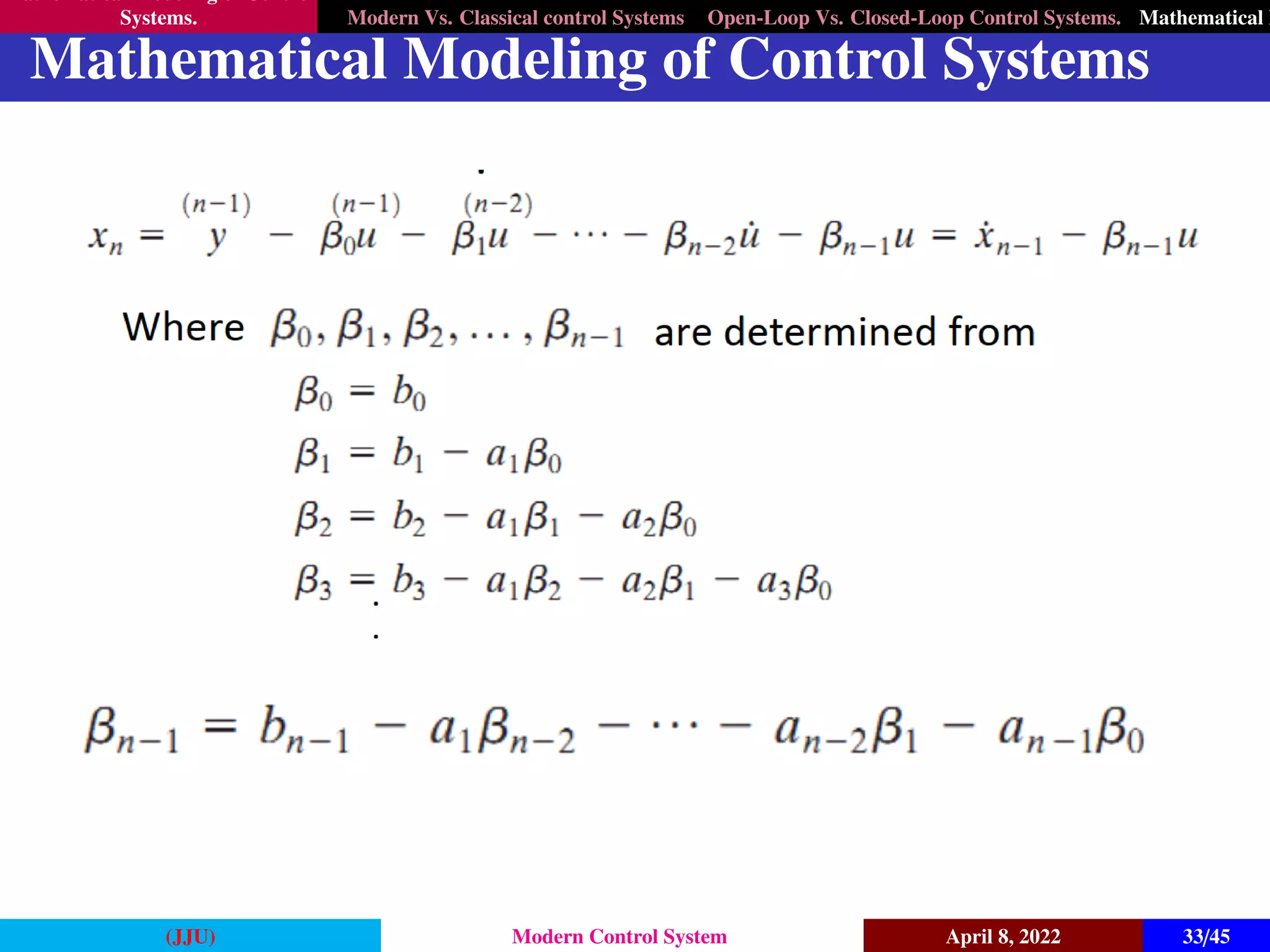
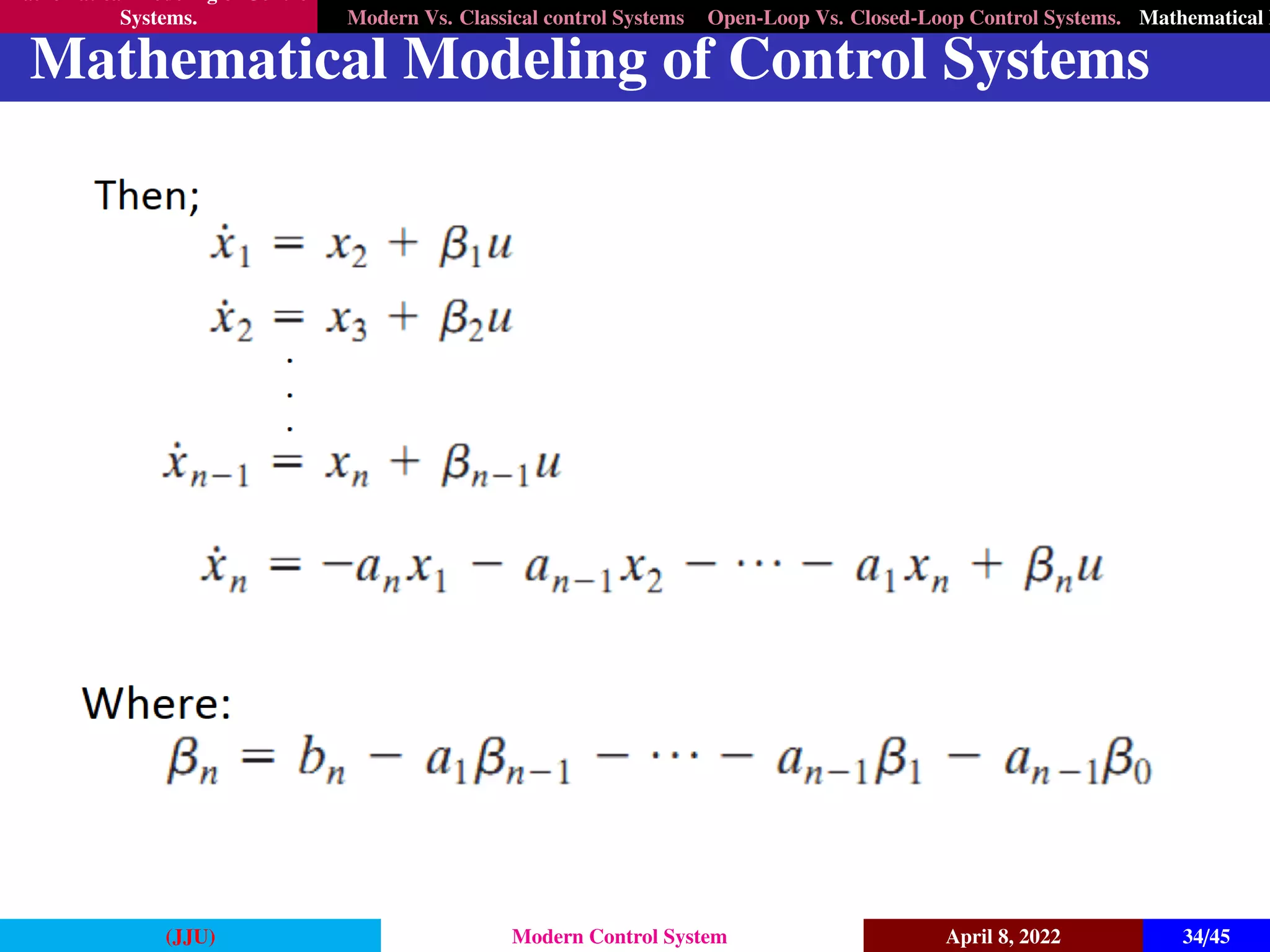
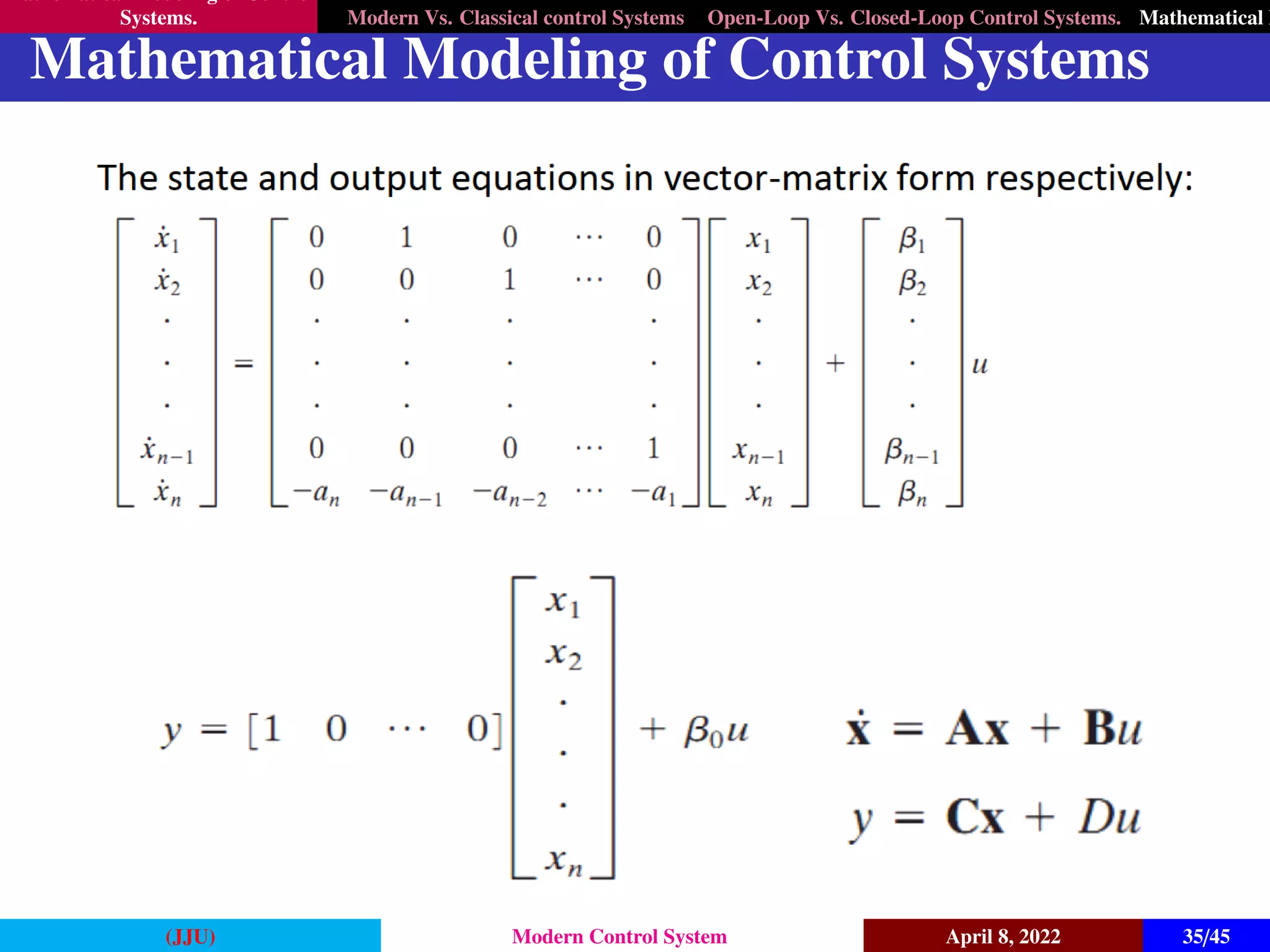
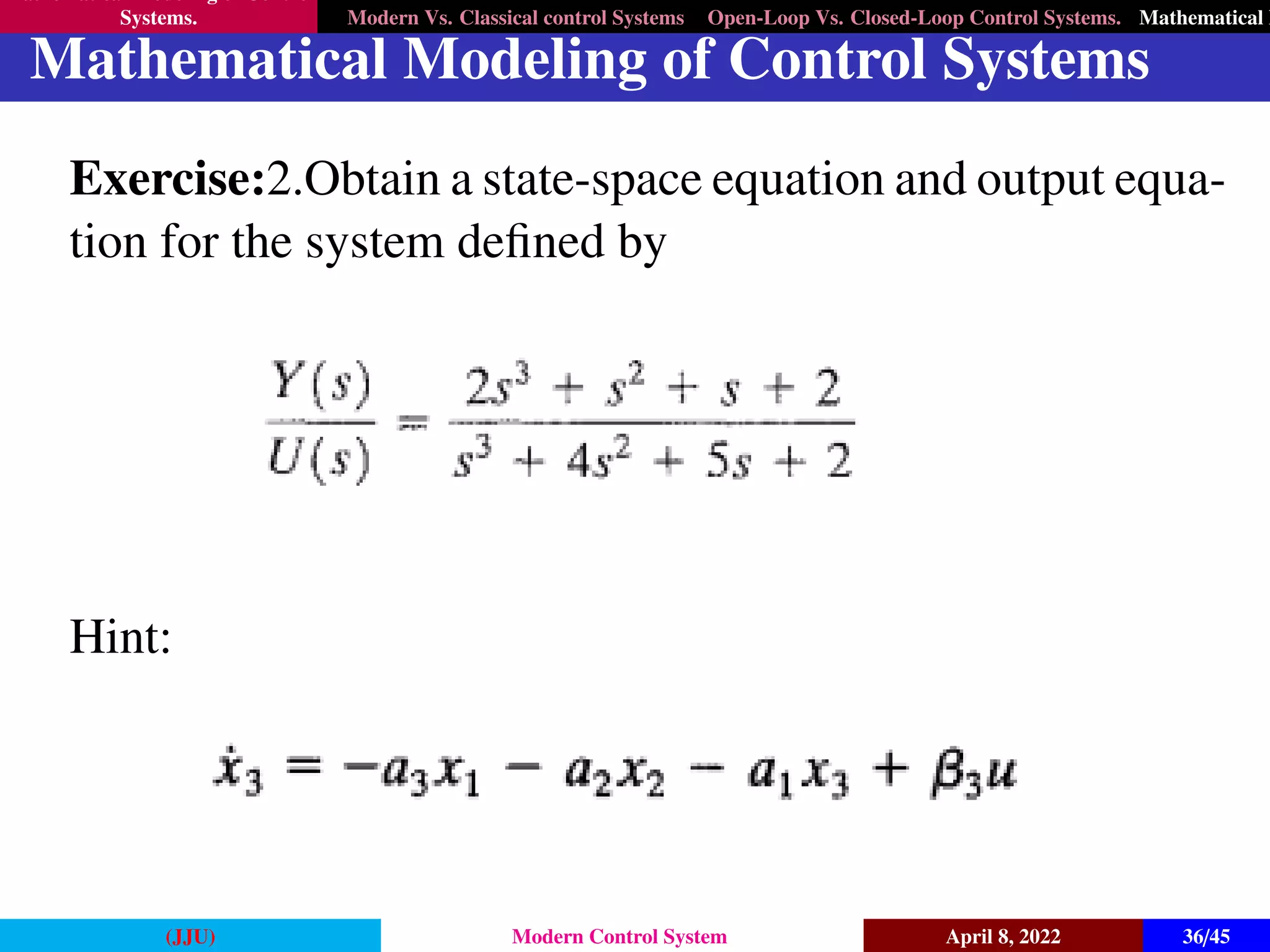
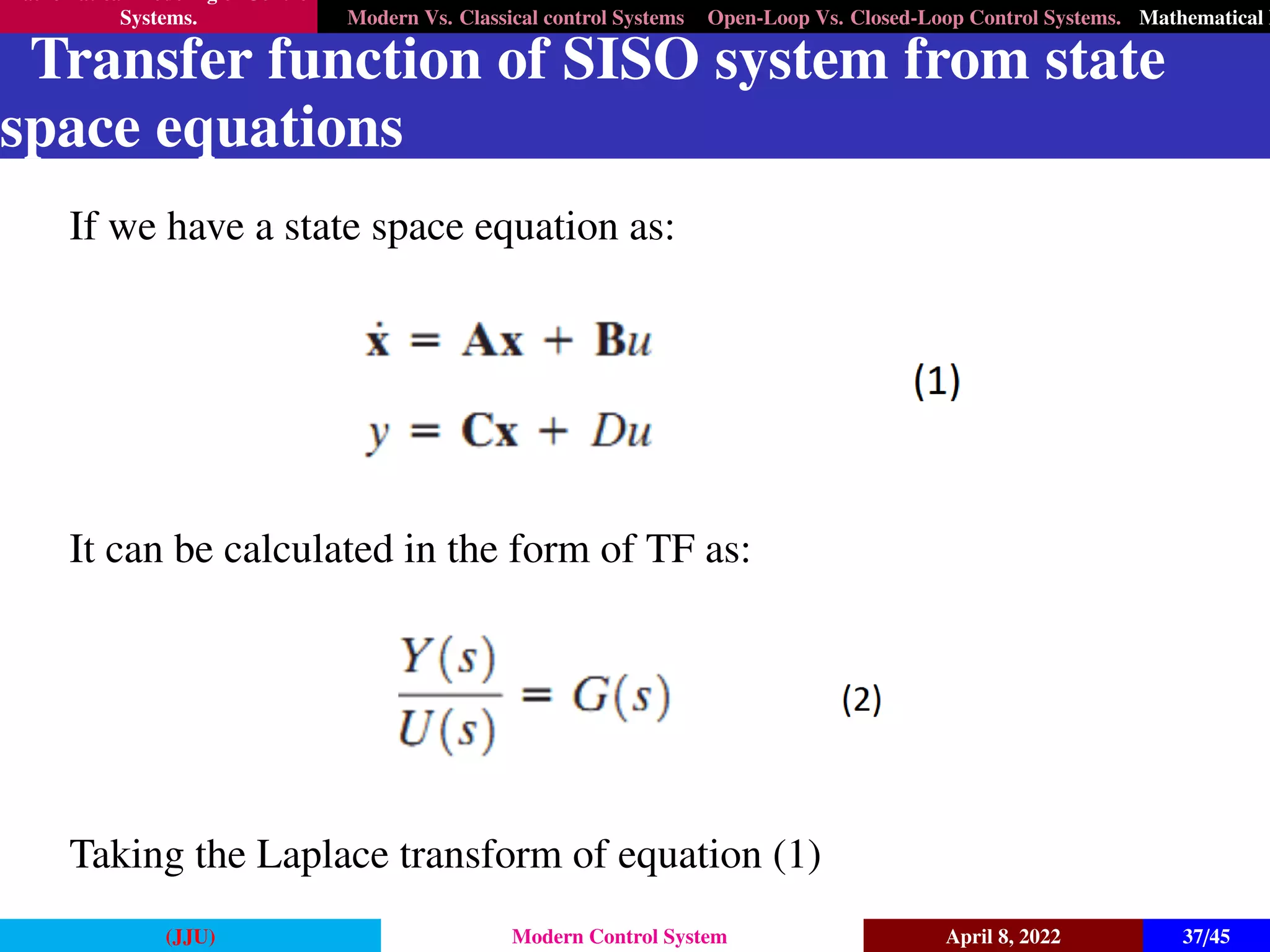
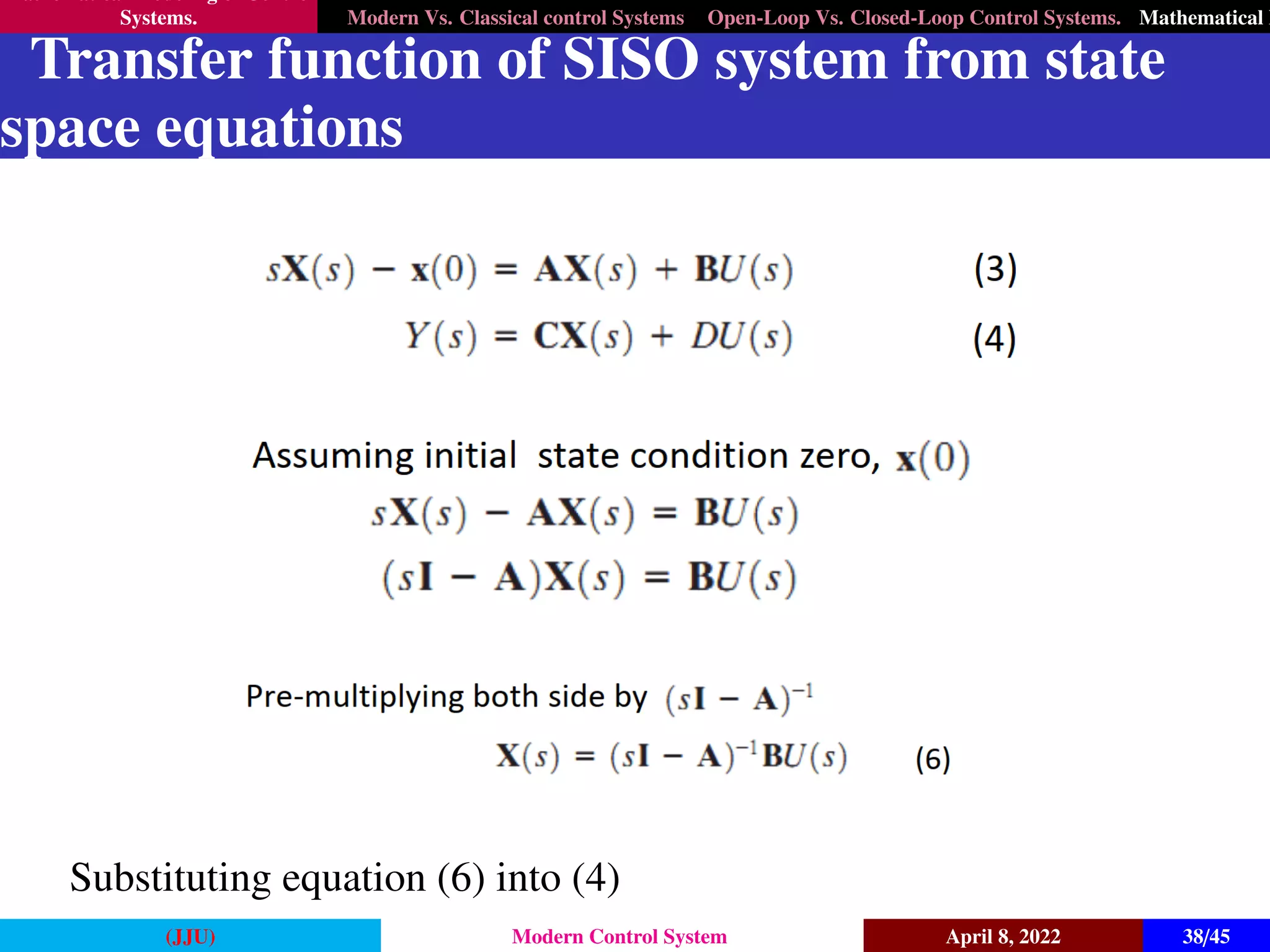
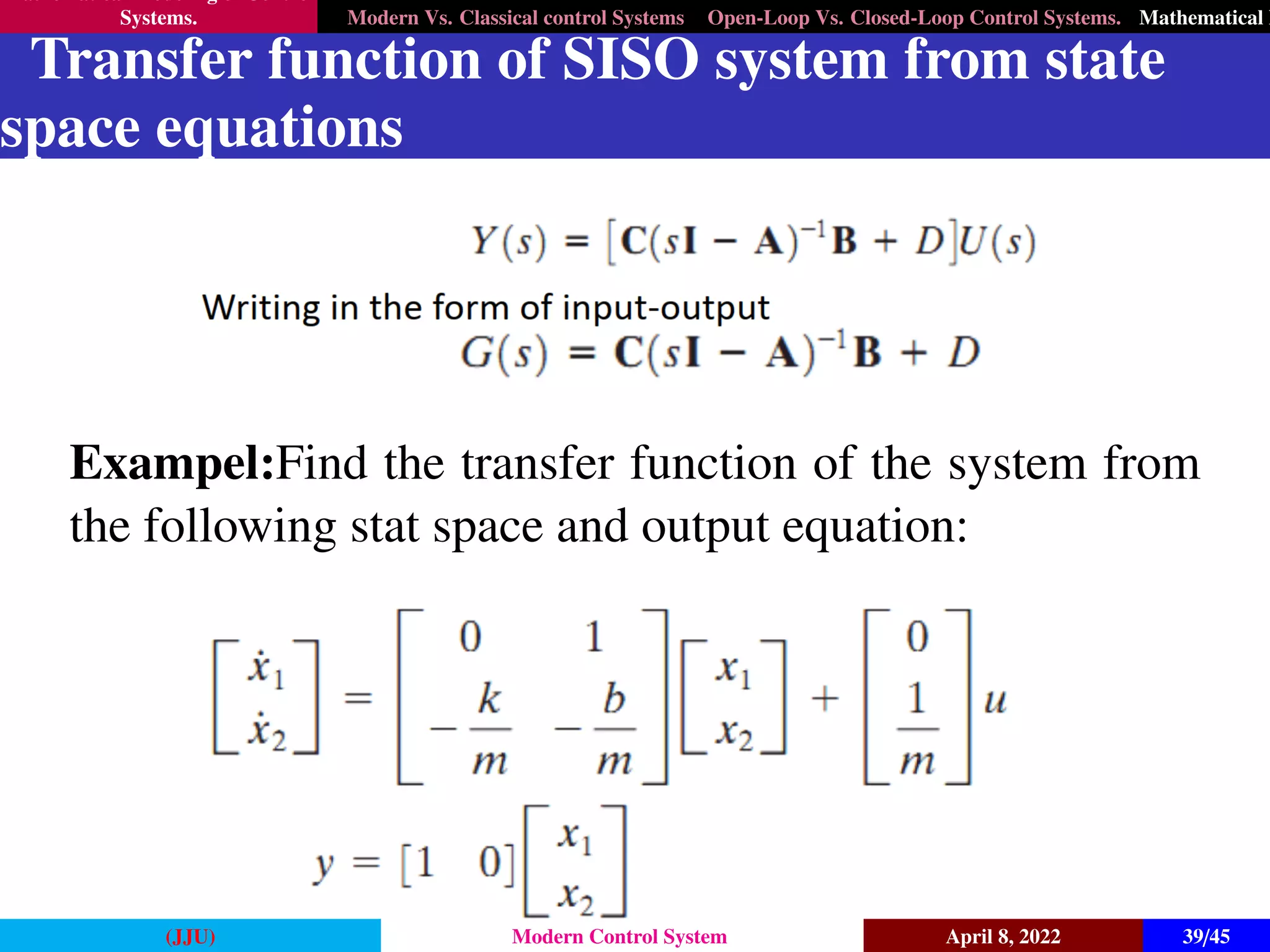
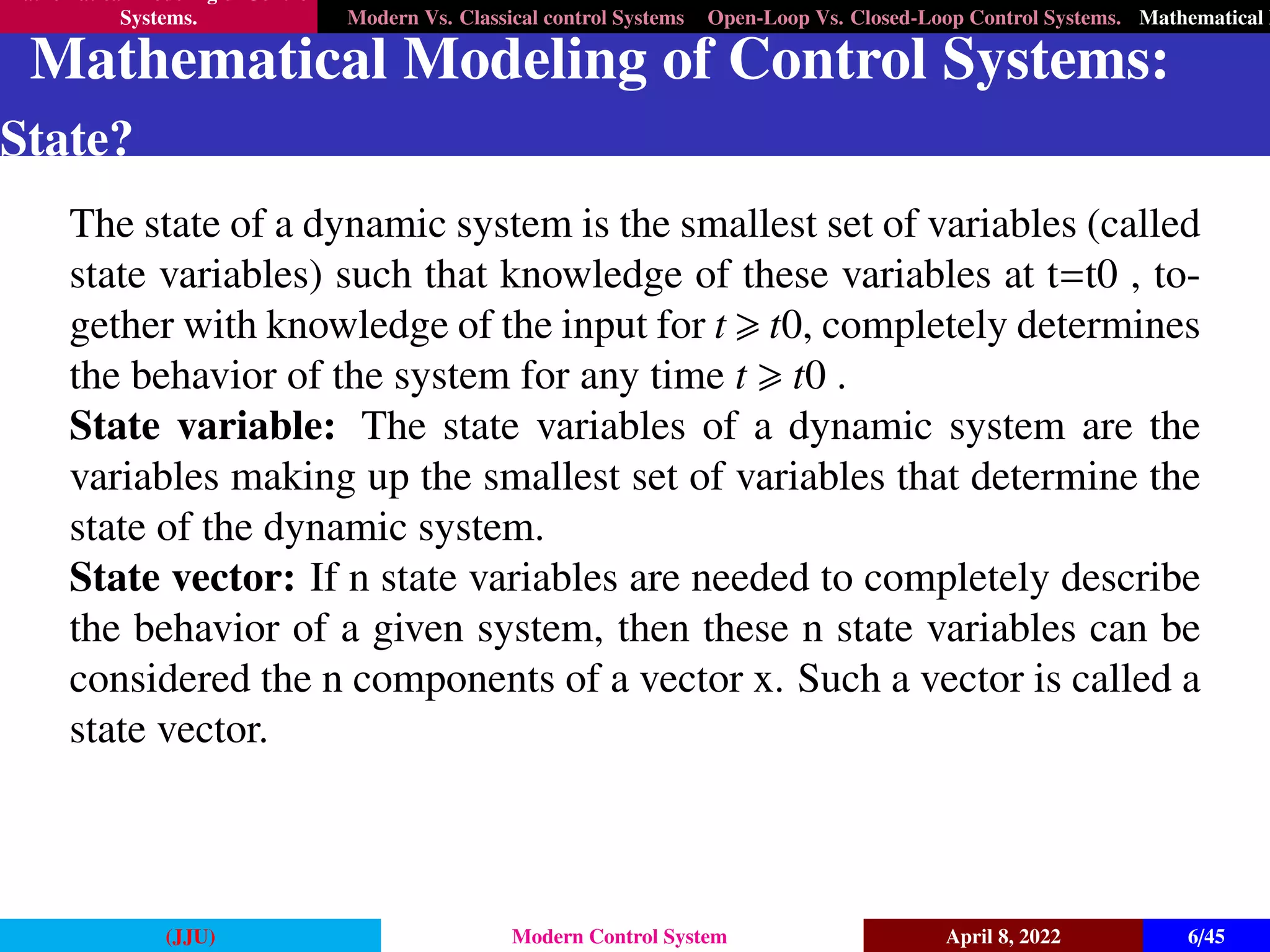
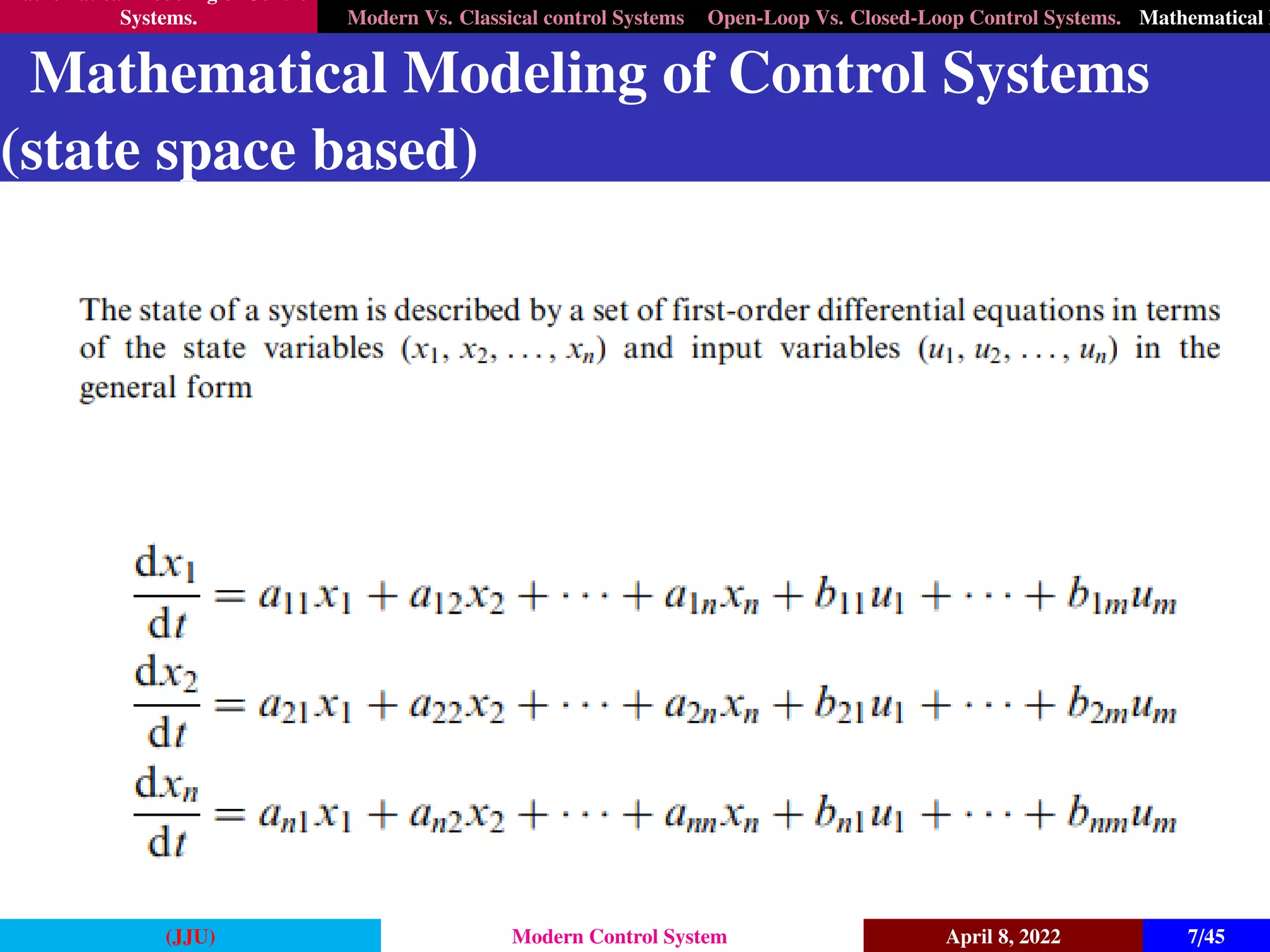
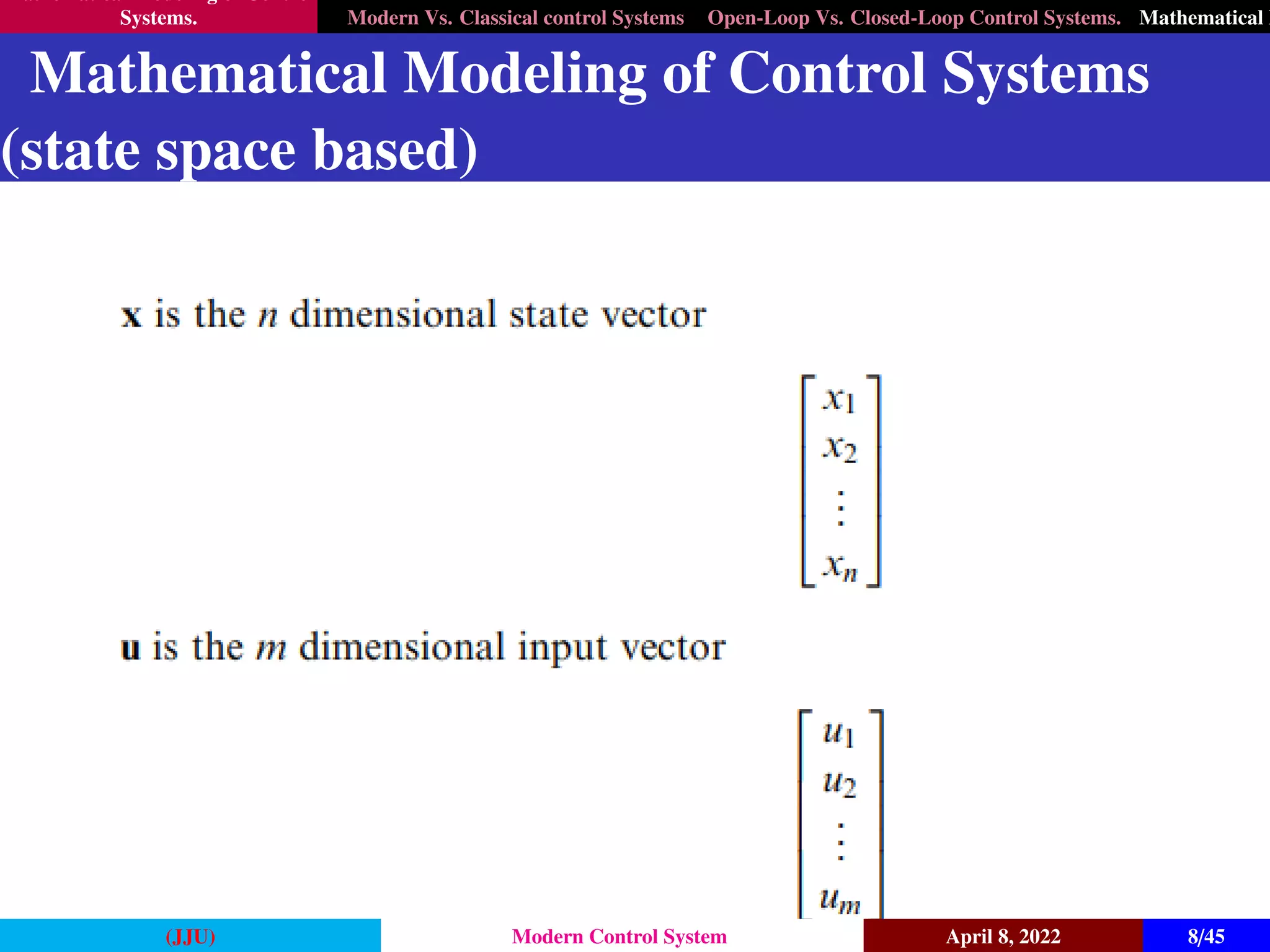
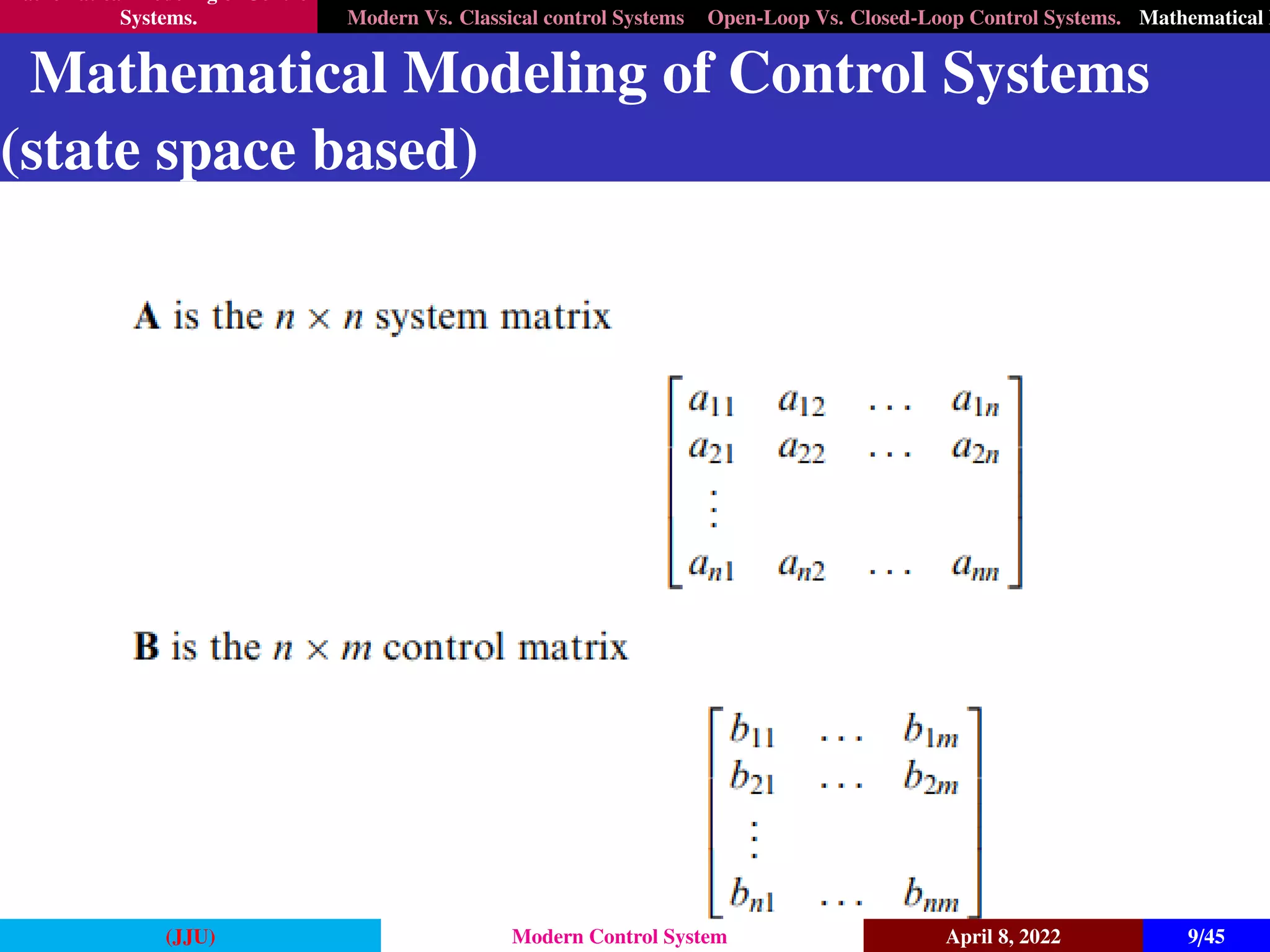
Mathematical Modeling of Control Systems
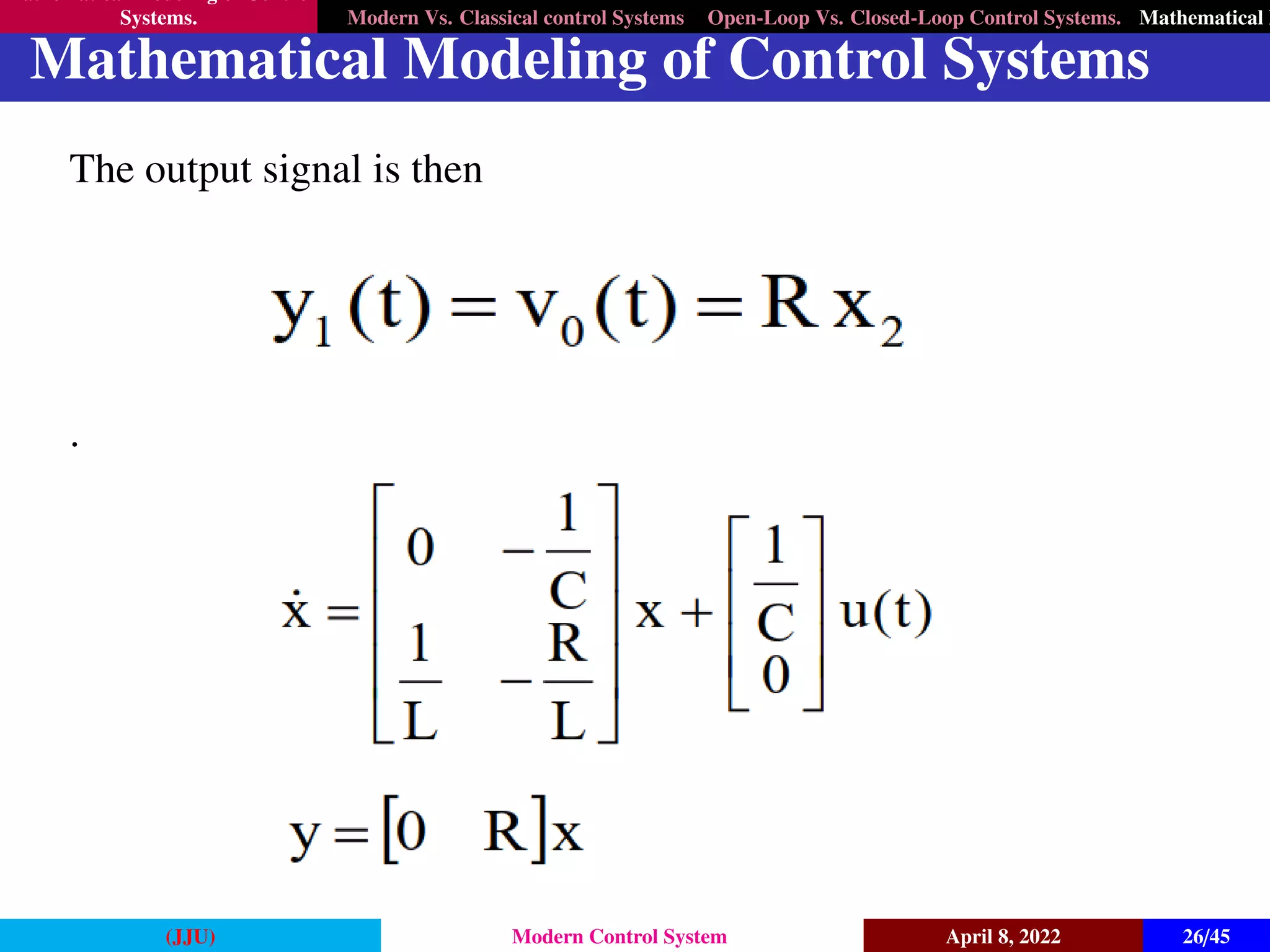
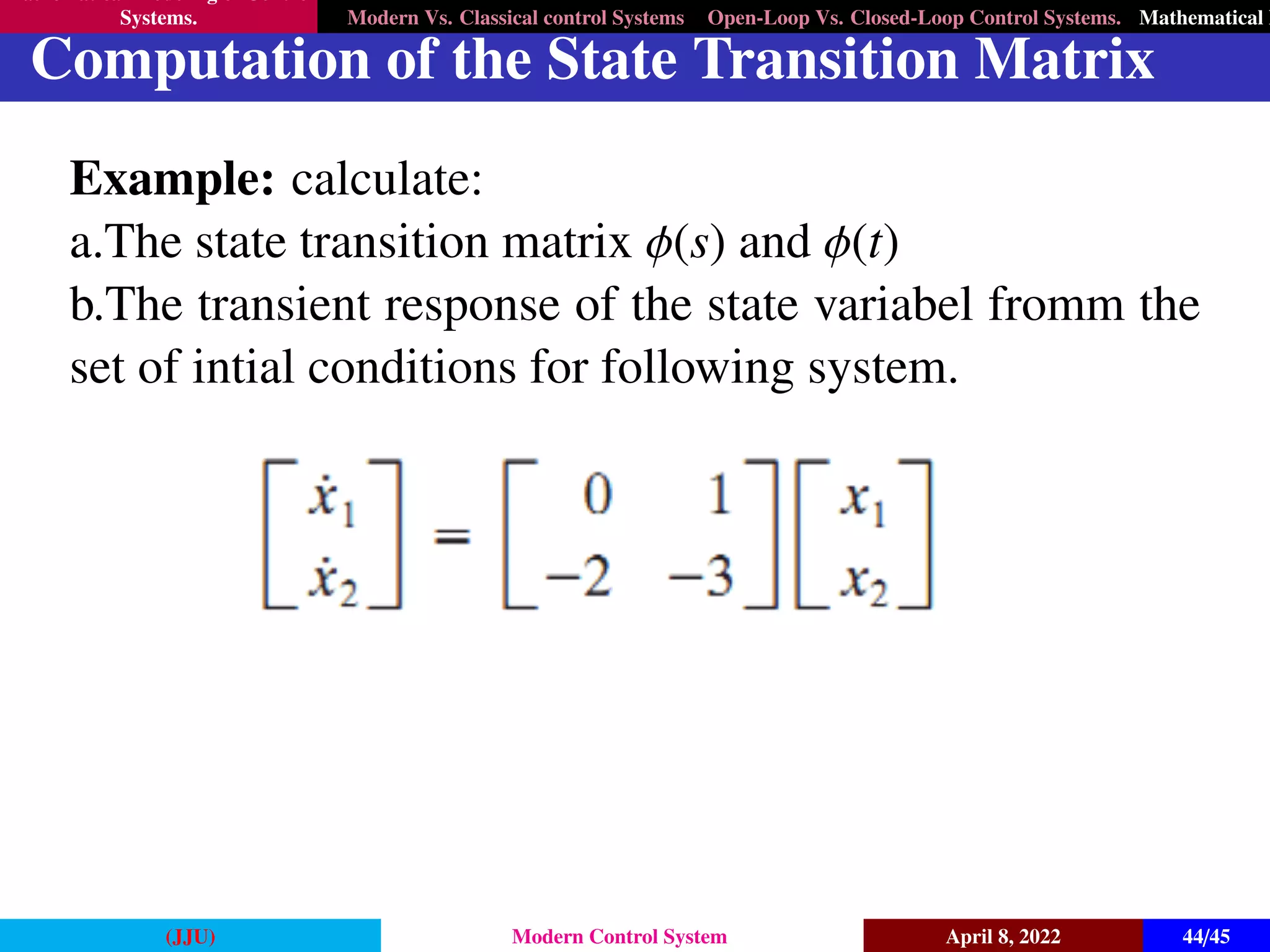
Example 2: RLC circuit formulate the state space representation
,state space equation by vecter form and output equation. The state
of this system can be described in terms of a set of variables [x1
x2], where x1 is the capacitor voltage vc(t) and x2 is equal to the
inductor current iL(t).
(JJU) Modern Control System April 8, 2022 23/45](https://image.slidesharecdn.com/chapterone1-230102171851-c606f0a6/75/Chapter-one-1-pdf-24-2048.jpg)