Download to read offline
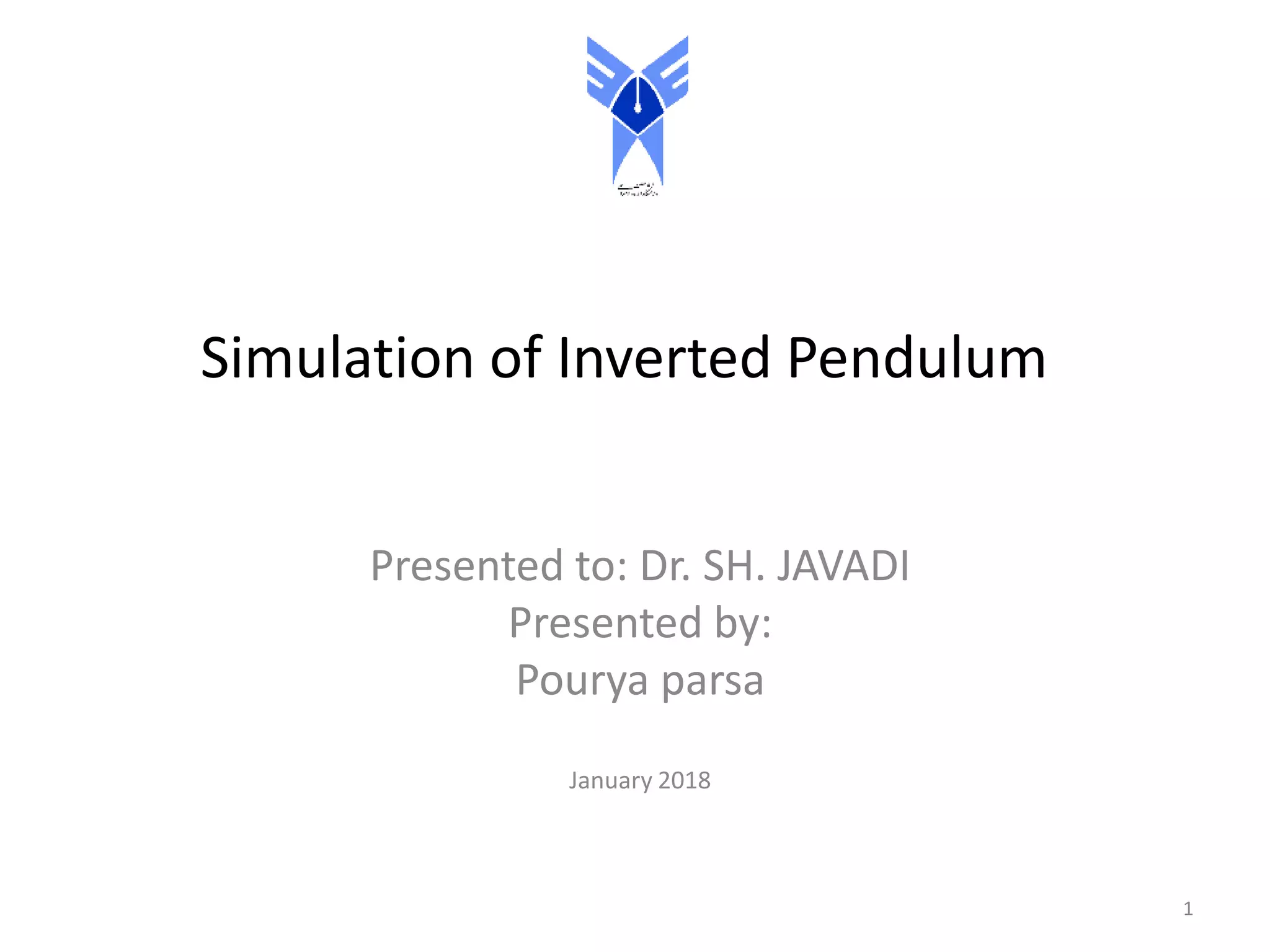
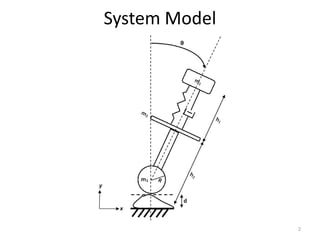
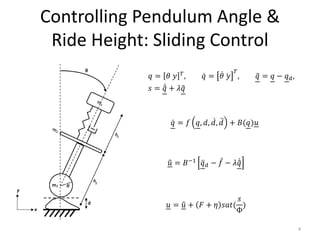
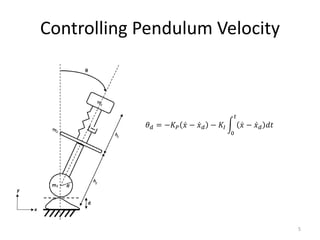
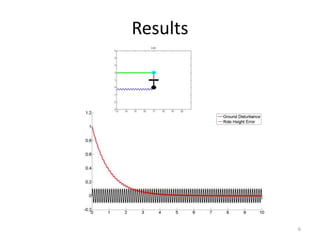
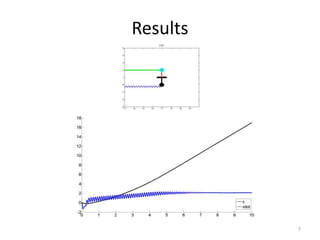

This document presents a simulation of controlling an inverted pendulum. It includes equations of motion to model the system state based on the pendulum angle and position over time. A sliding control method is used to control the pendulum angle and ride height, choosing control inputs to minimize errors between the actual and desired states. Simulation results are shown controlling the pendulum velocity and angle to stabilize the system. An animation demonstrates the full simulated control of the inverted pendulum.



































































