بخش این اصلیمراجع:
،تبریزفنی عالی شزآمو مرکز ،صنعتی لکنتر،طهماسبی احمد1387.
T. A. Hughes, Measurement and Control Basics, International
Society of Automation (ISA),2015.
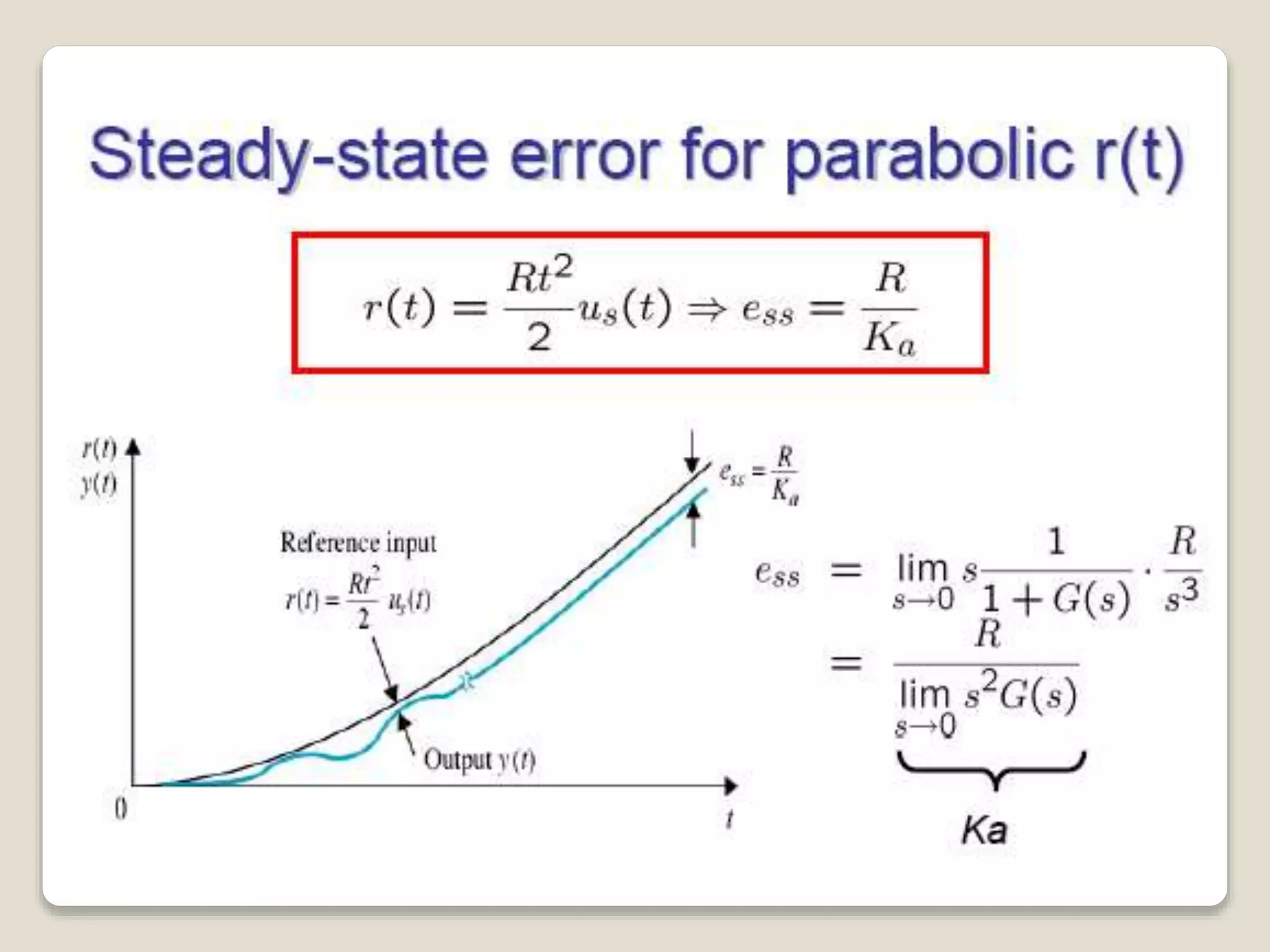
J. Choi, Steady State Error, Lecture Notes of Control Systems,
Lecture 13, Dep. Of Mech. Eng., Michigan State Univ.
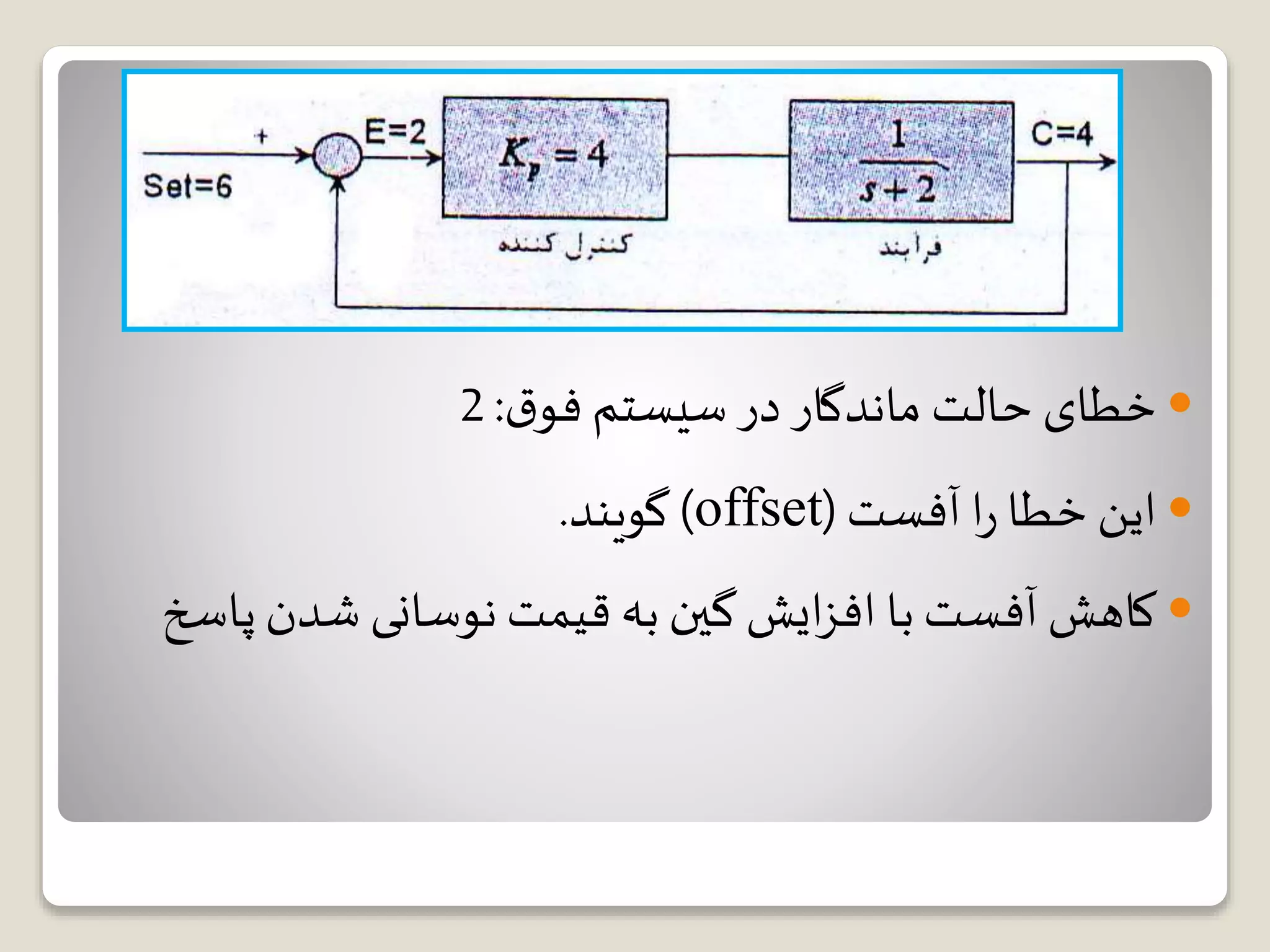
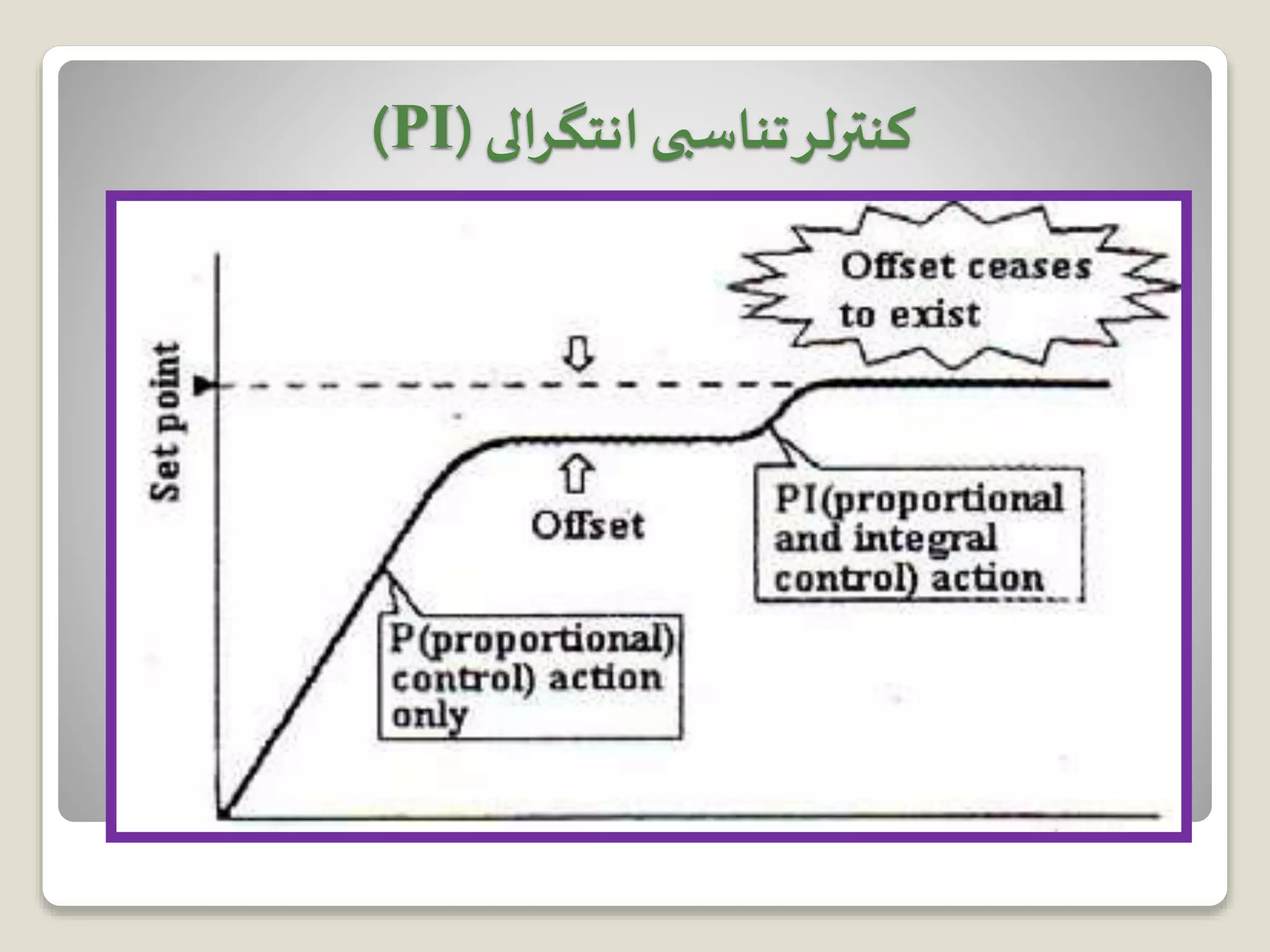
وجود دلیل بهPوجوددلیل به و دردا خوبی سرعتIحالت خطای
درندا ماندگار.
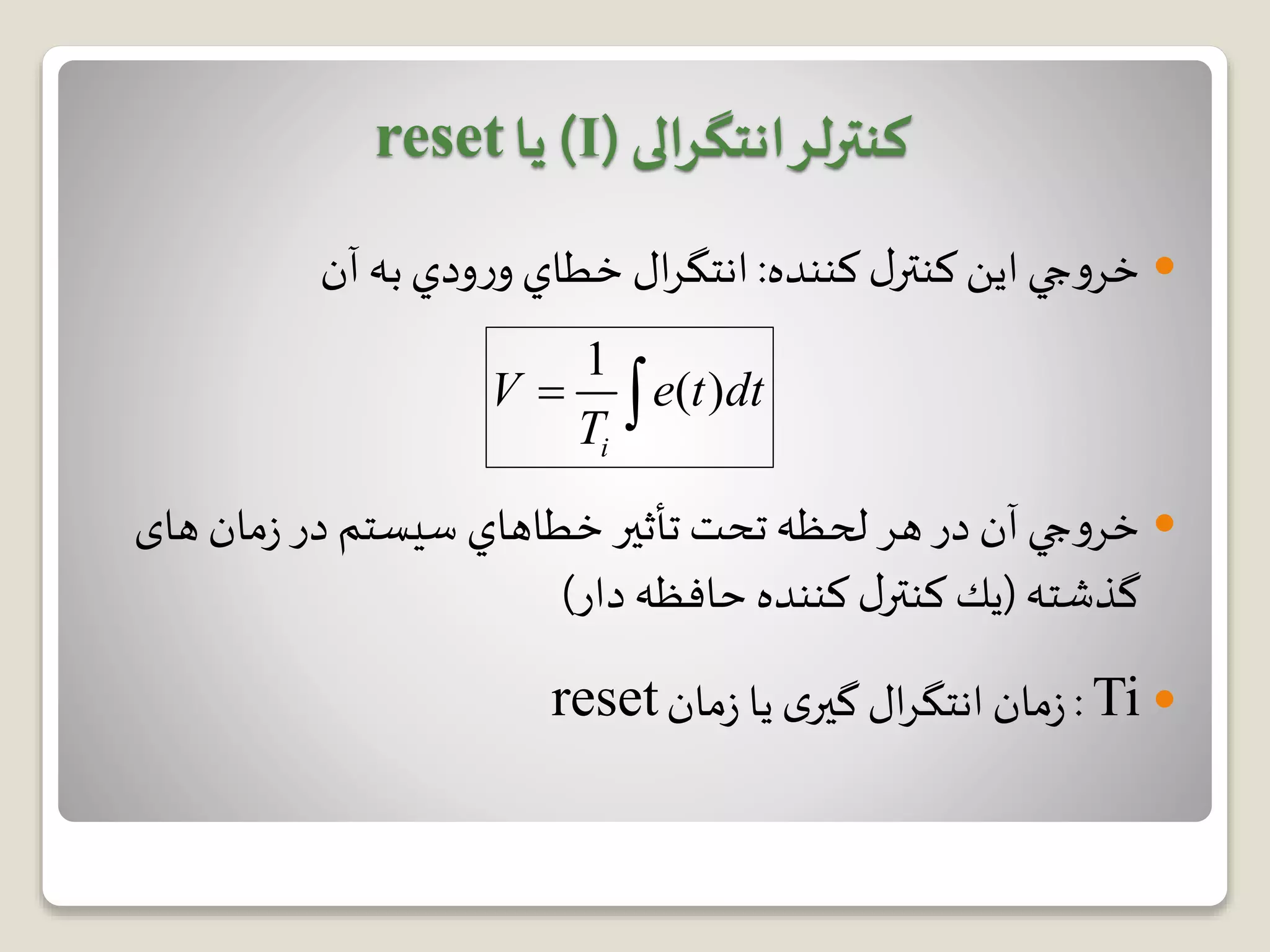
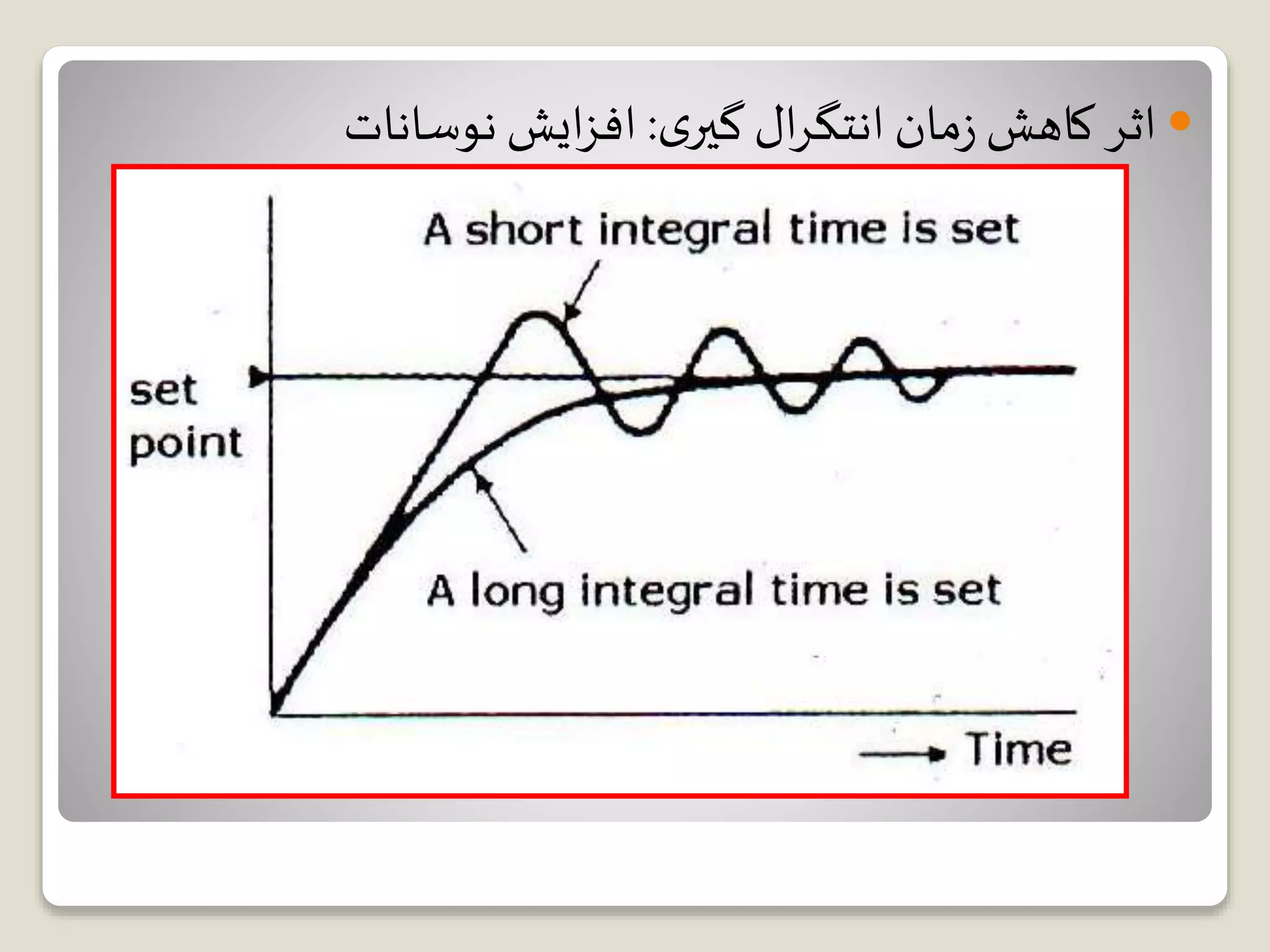
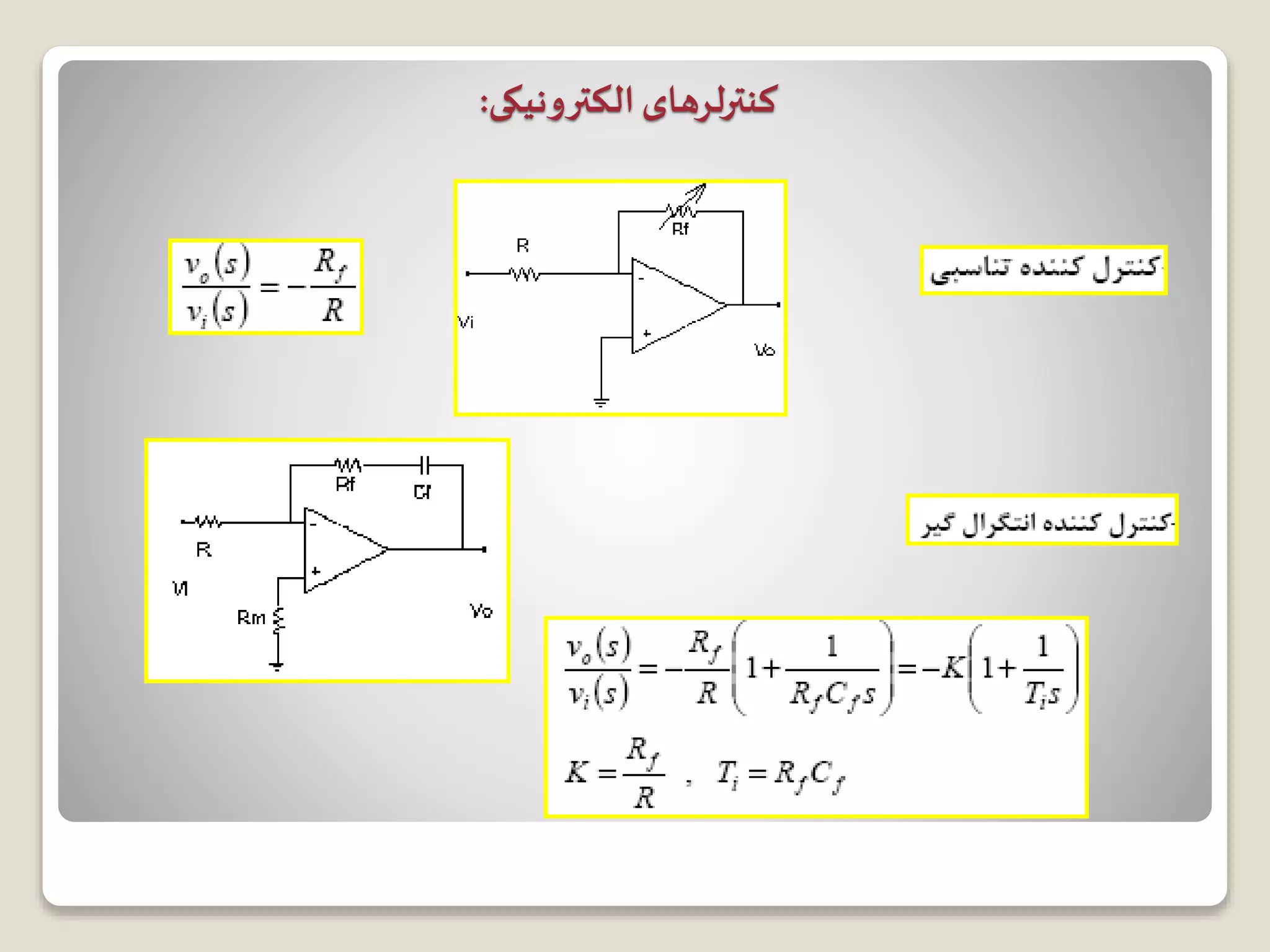
کنترلرانتگرالی تناسبی(PI)
1
( ) ( ( ) ( ) )p
i
V t K e t e t dt
T
( ) 1
(1 )
( )
p
i
V s
K
E s T s
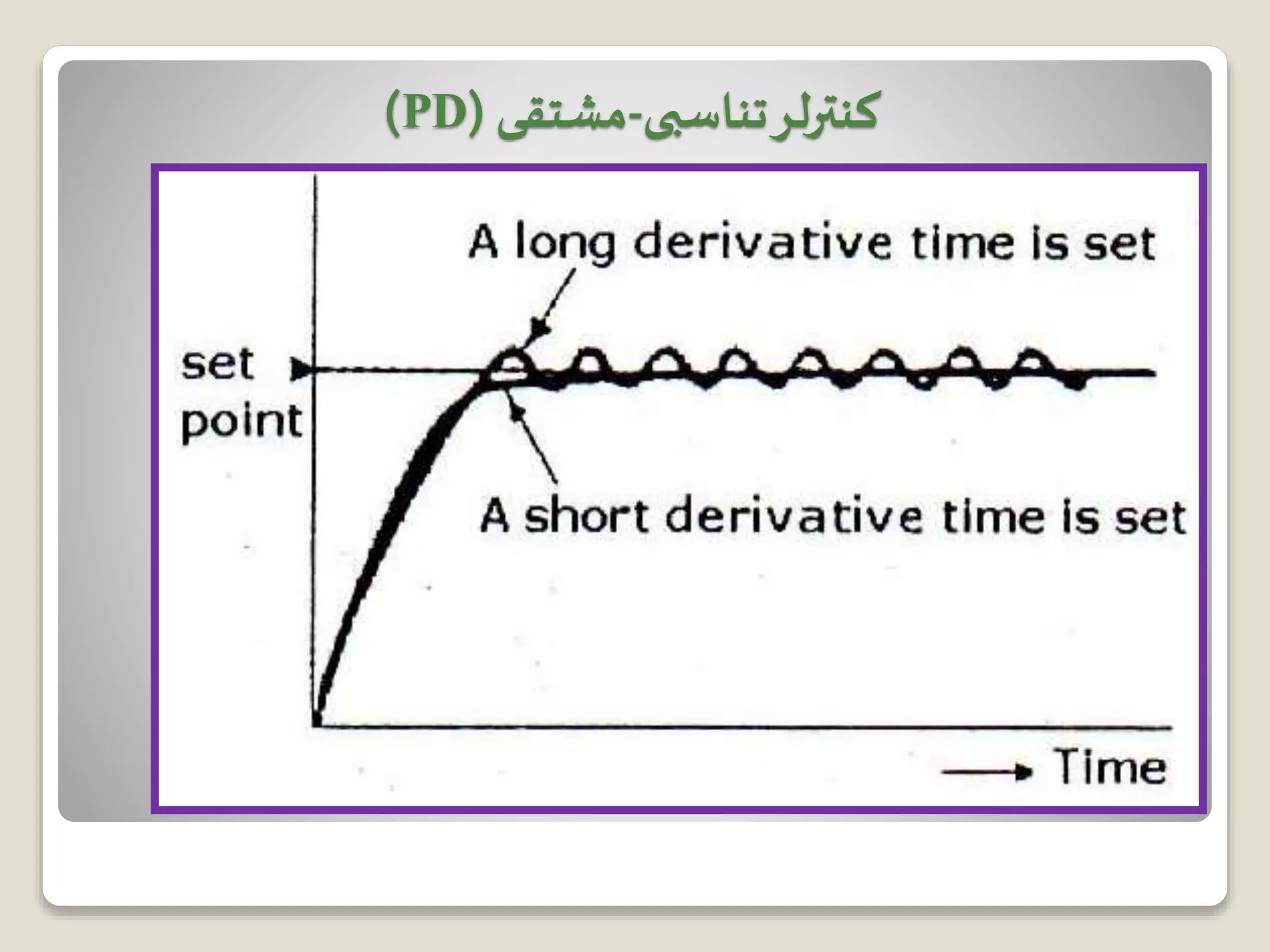
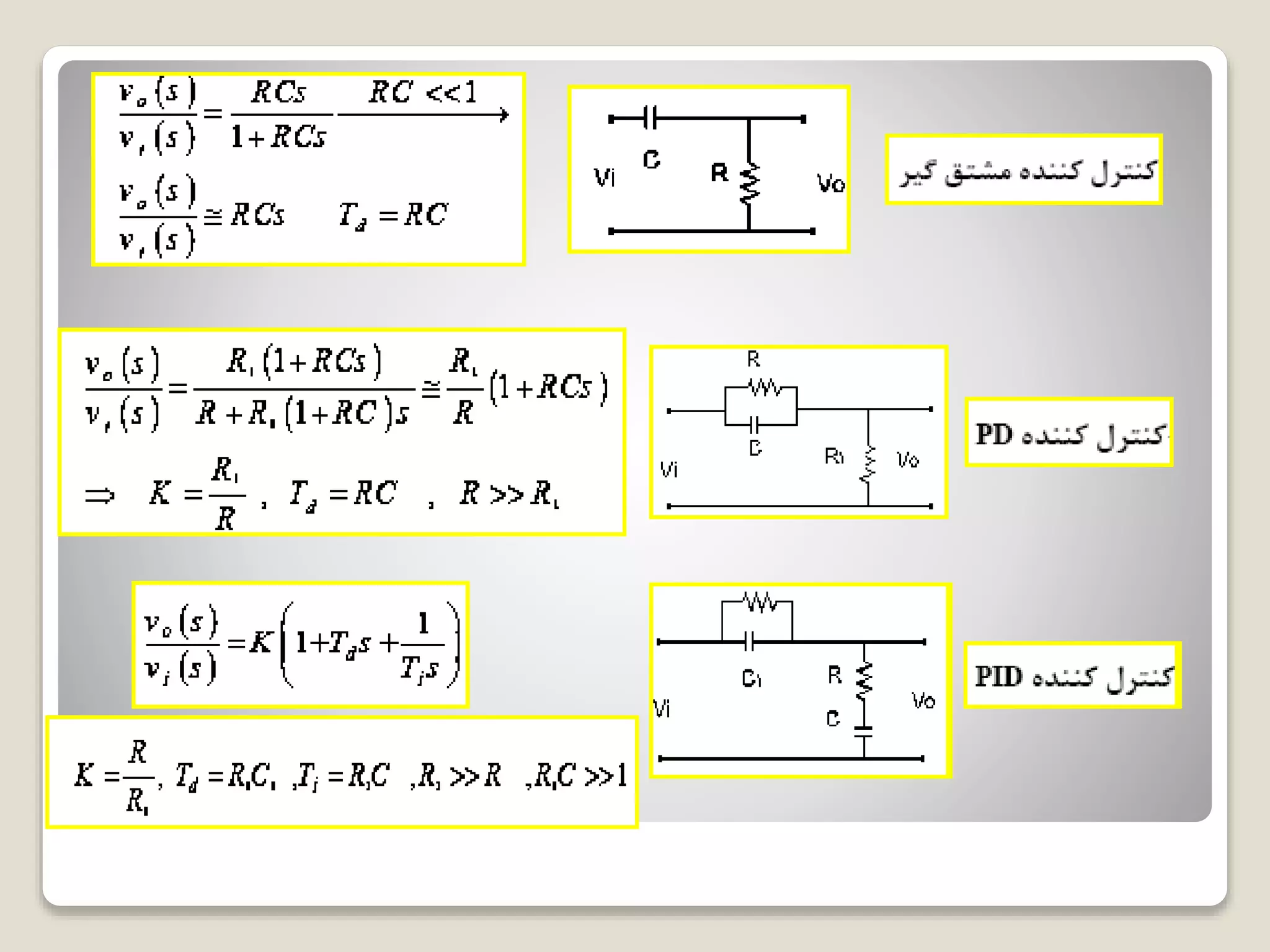
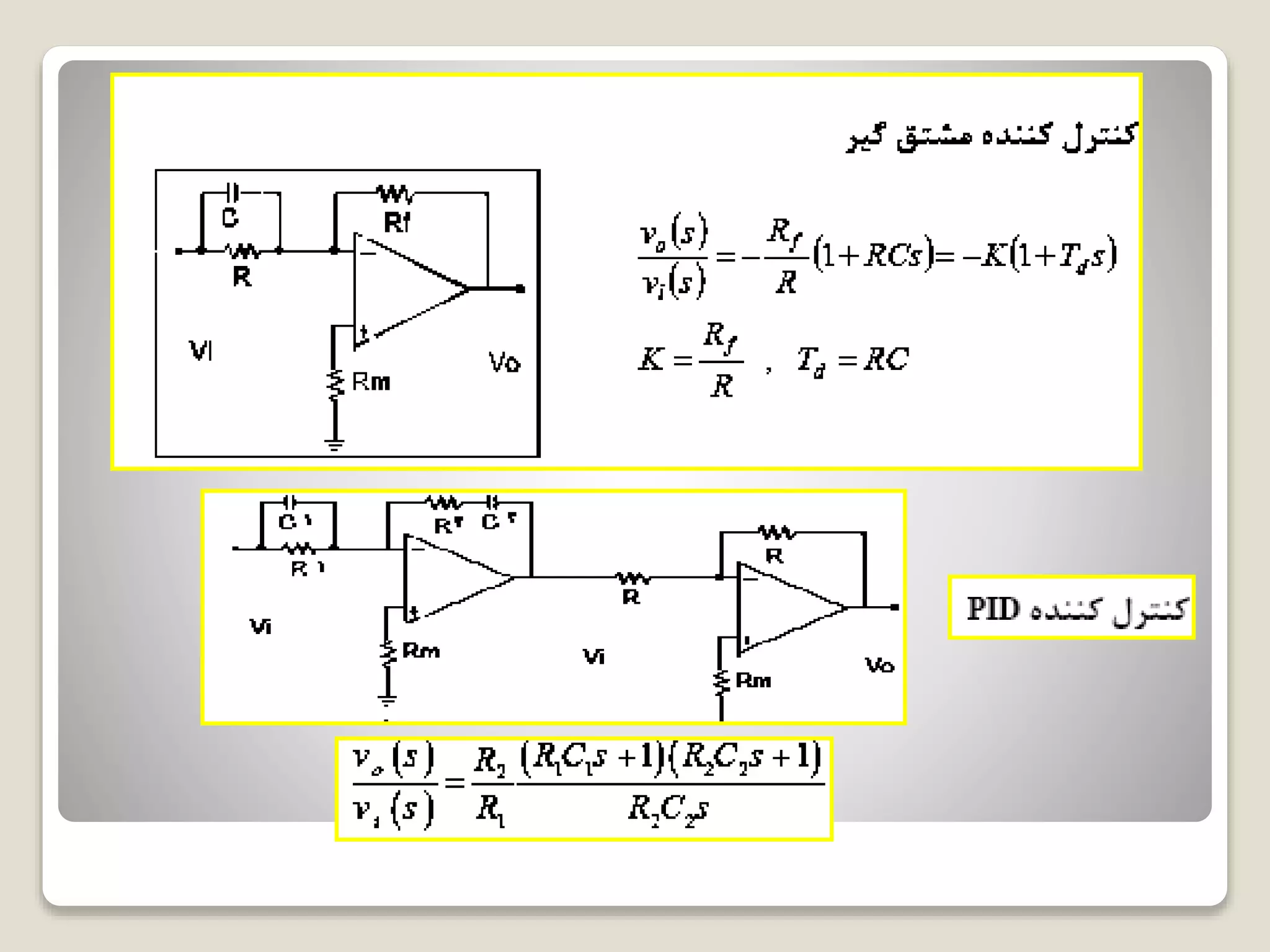
تناسبیکنترلر-مشتقی(PD)
تناسبی طریق ازماندگار خطای ی کاهش تاثیر
کندی با مقایسه در اغتشاشات سریع تصحیح تواناییI
متفاوت های نتیجهبامشتق مانزتغییریگیر
( )
( ) ( ( ) )p d
de t
V t K e t T
dt
( )
(1 )
( )
p d
V s
K T s
E s
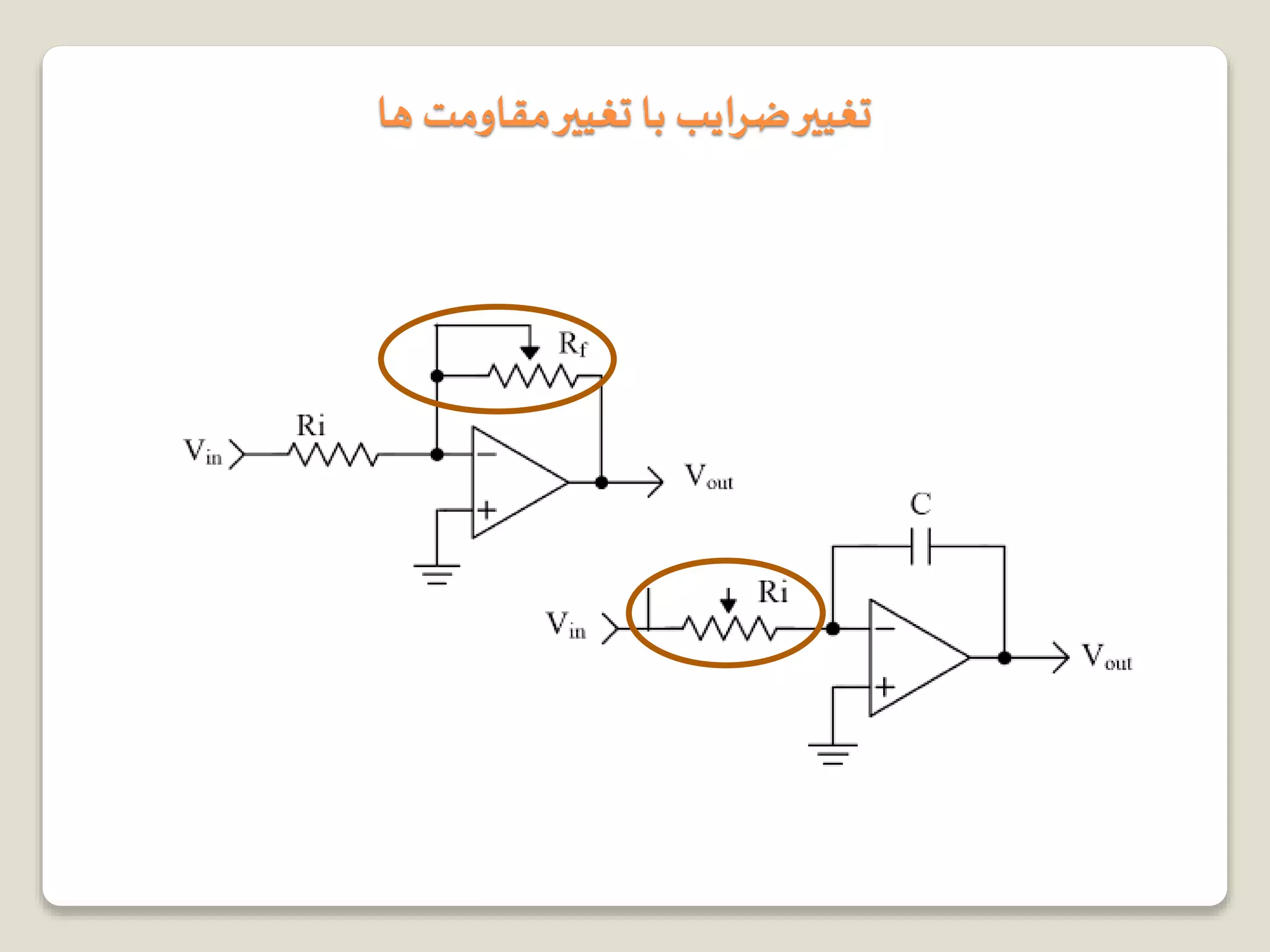
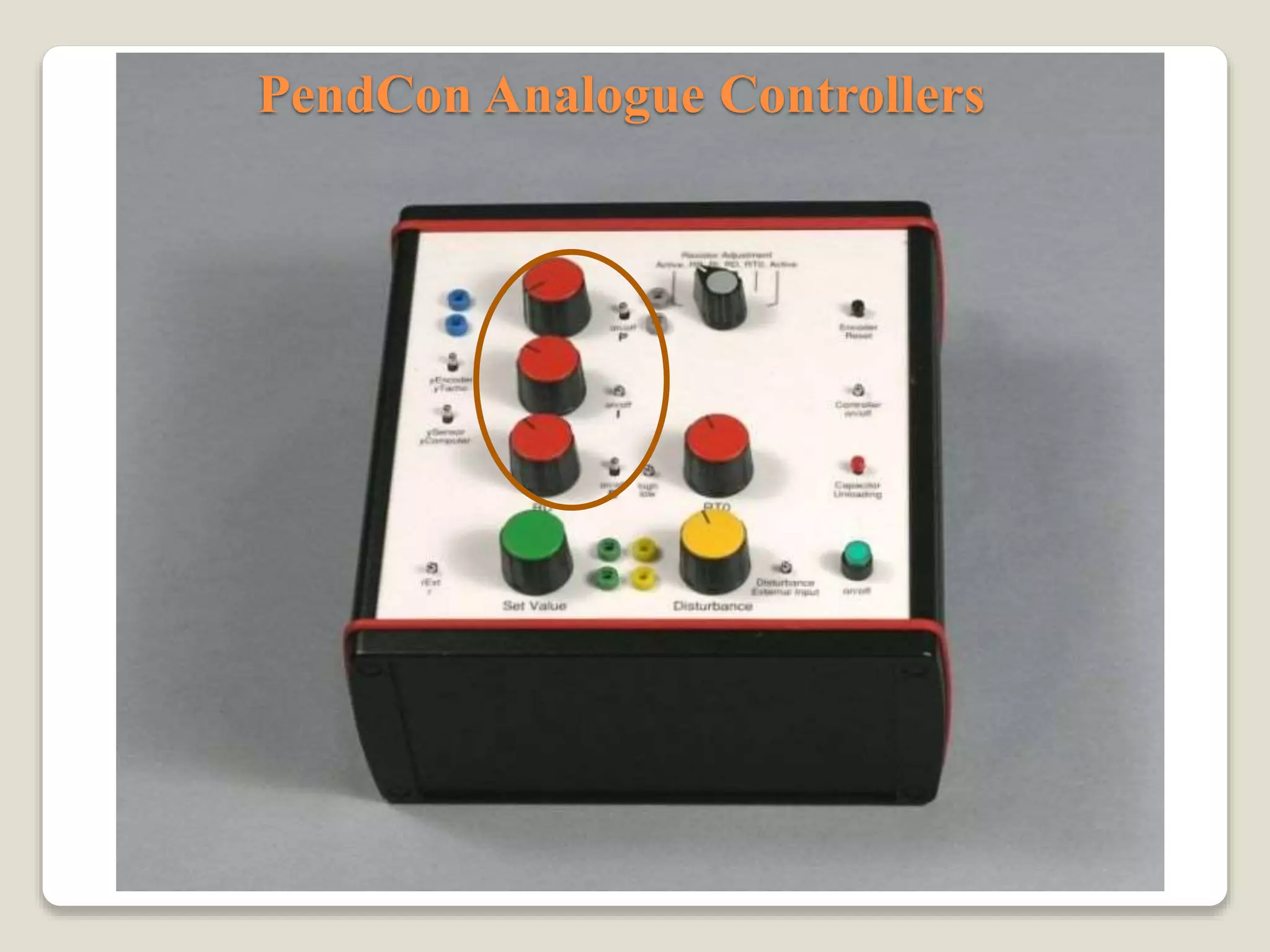
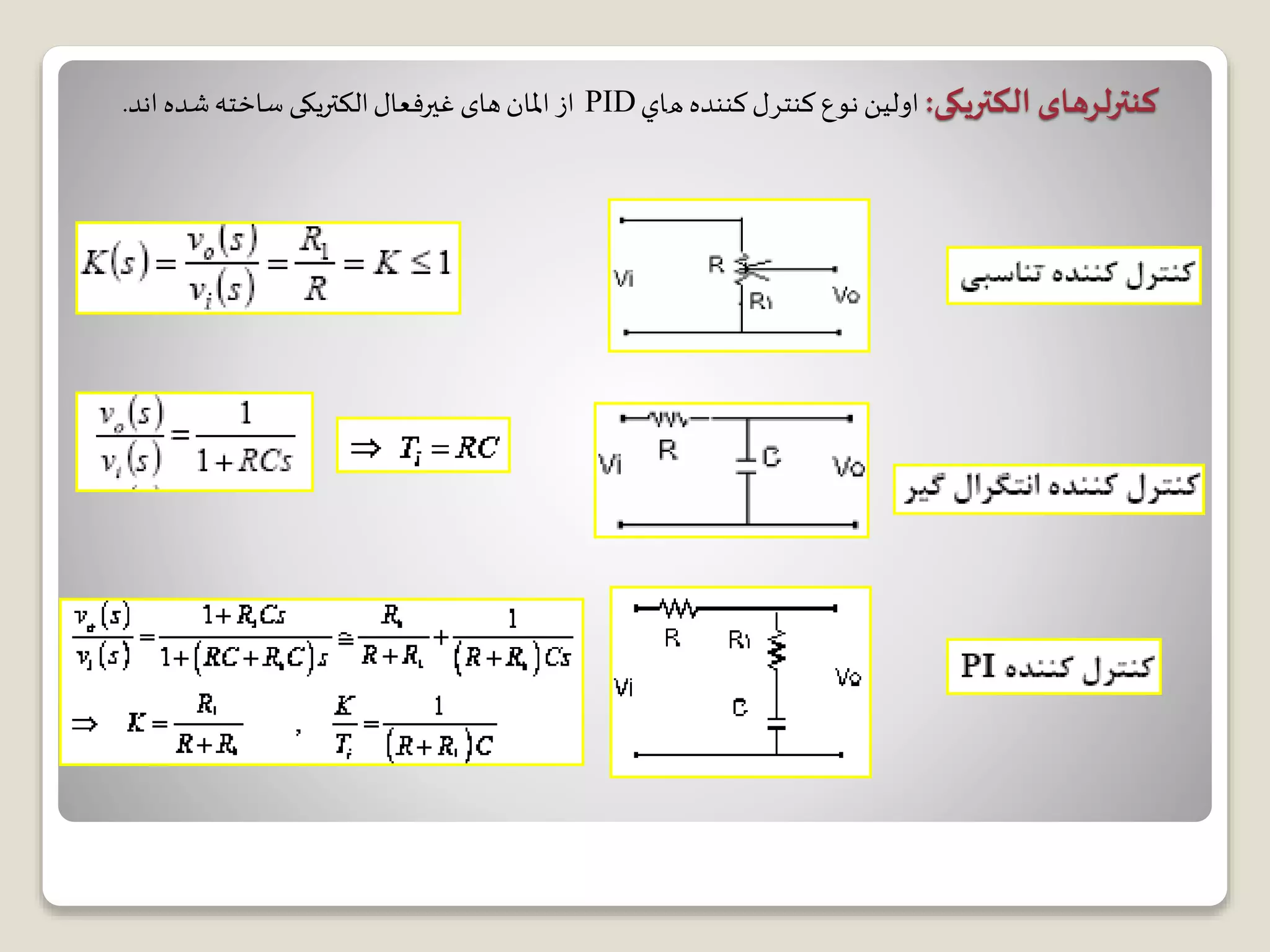
#9 هر چند تغییر پارامترها با تغییر مقاومت ممکن است، اما در انتخاب ضرایب در حالت کلی با محدودیت مواجه هستیم.
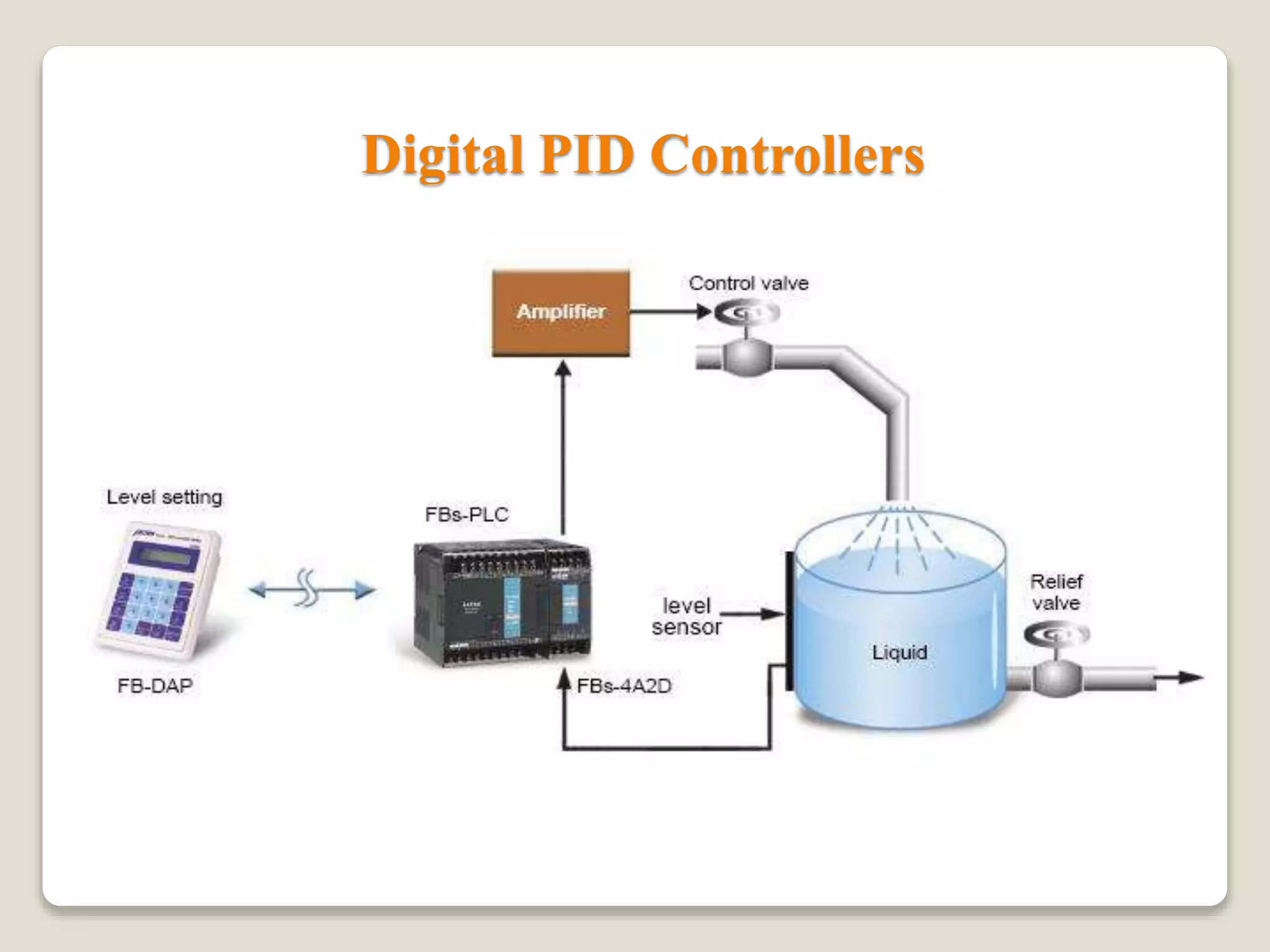
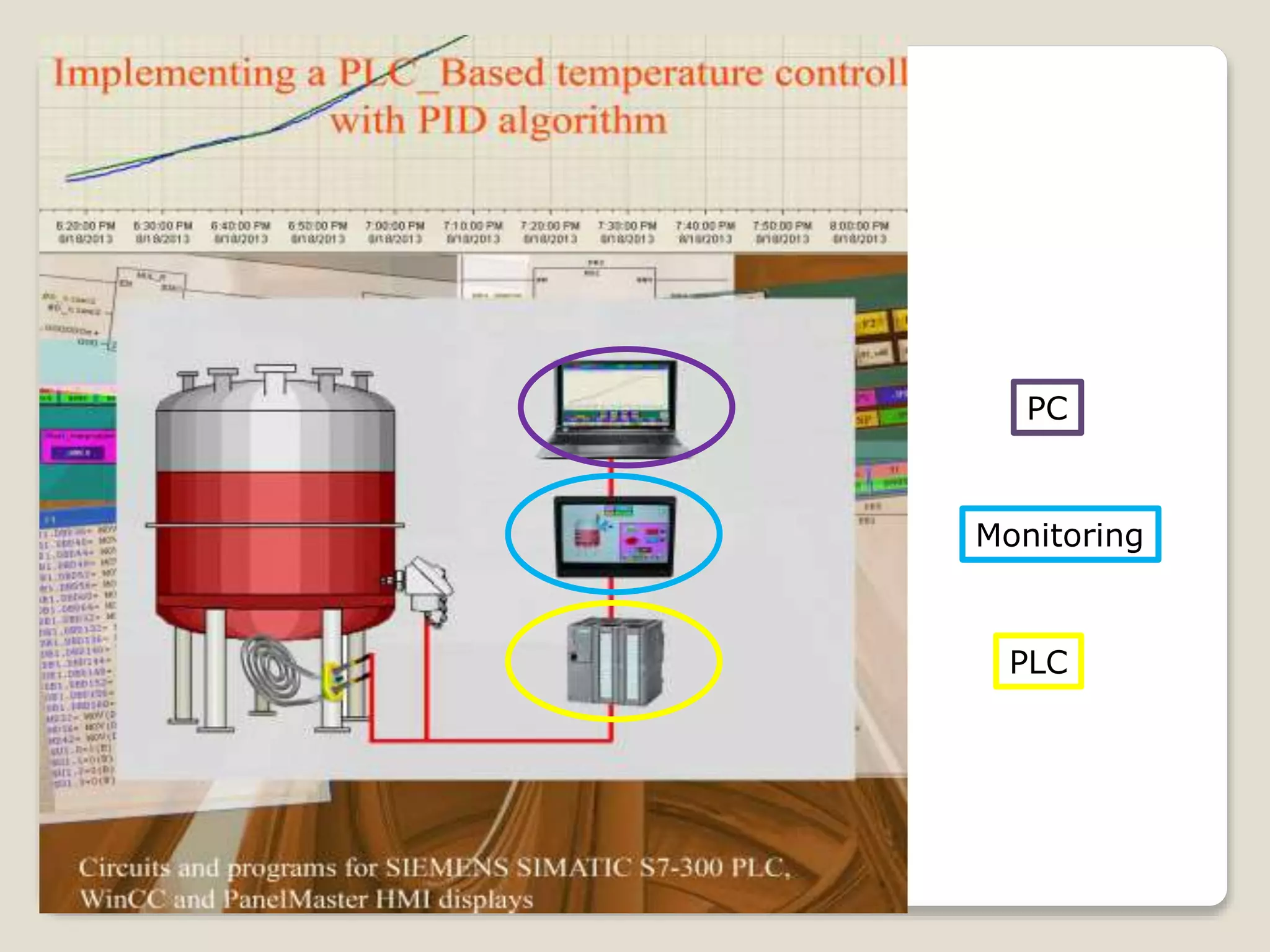
#13 سیگنال الکنریکی به پی ال سی که ماژولار نیز هست و ممکن است از چند پردازشگر برای انجام محاسباتش استفاده کند، وارد می شود همزمان با پردازش و ارسال سیگنال کنترلی می تواند توسط نمایشگر محلی پی ال سی یا نرم افزار نصب شده روی پی سی نمایش داده شود. به علاوه اینترفیس طراحی شده، این قابلیت را فراهم می آورد تا کاربر تغییرات لازم چه در تغییر ست پوینت چه در تغییرات دیگر را از طریق پی سی به پی ال سی اعمال کند.
#23 کاربرد به تنهایی در فرآیندهایی که نیاز به تصحیحی آهسته دارند مثلا کنترل سطح مایع، دما یا PH
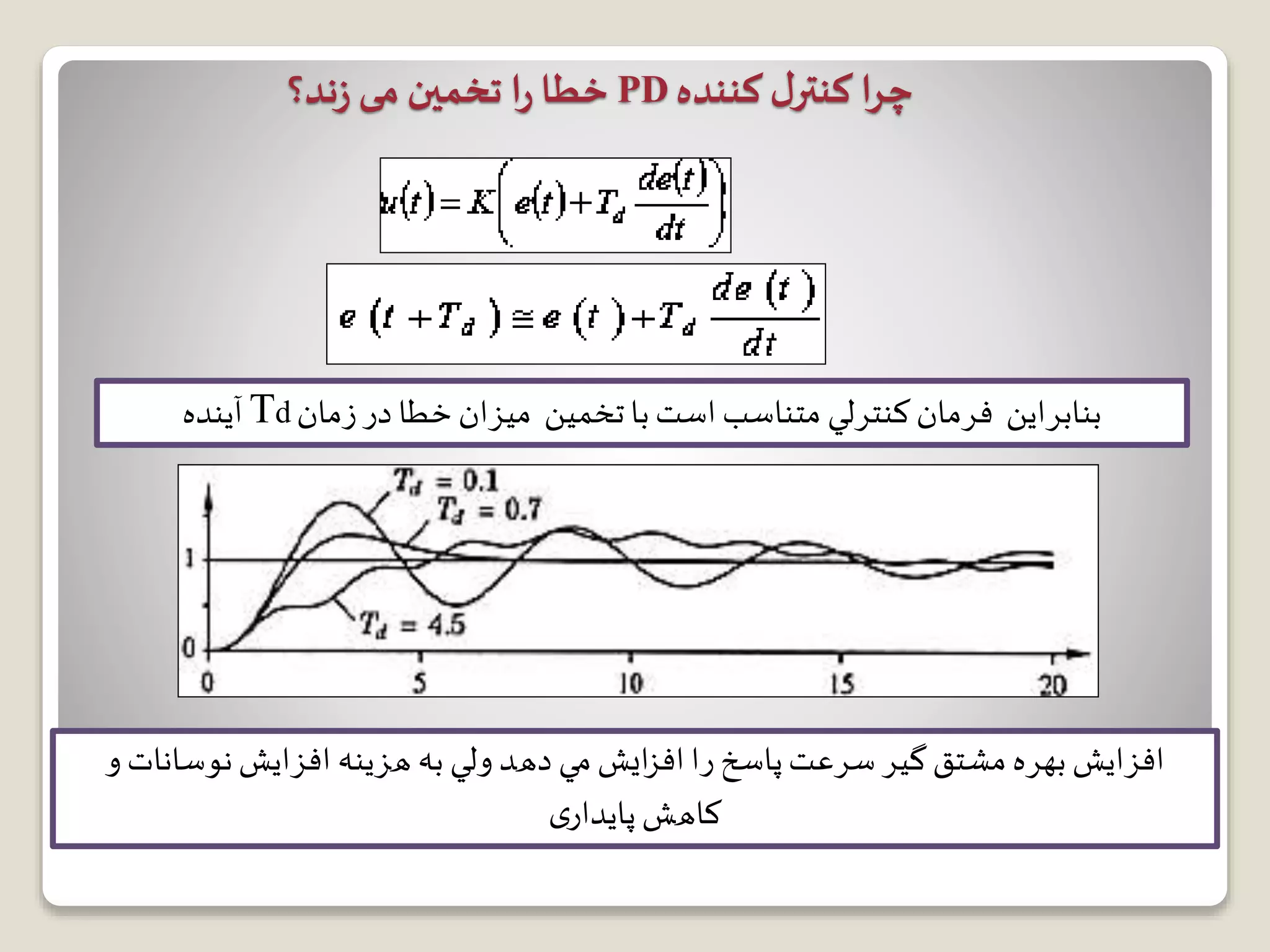
#24 عمل مشتق گيري براي فرآيندهاي
تأخيردار يا با ثابت زماني بزرگ مناسب است ؛ زيرا معمولاً تغييرات خطا مقدمه اي براي افزايش آن است و كنترل
كننده مشتق گير از اين نظر آمادگي لازم براي تصحيح خطاهاي آتي را فراهم مي آورد ، يعني كنترل كننده ديدي آينده نگر و پيش بيني دارد و به همين دليل گاهي آن را كنترل كننده پيش فاز نيز مي گويند .
خ: می گوید تغییرات خطا زیاد شد پس پیش بینی می کند که خطا به همین نحو ادامه می یابد پس تغییرات زیادی لازم است
#25 چرا كه تغييرات شديد ناشي از نويز باعث افزايش خروجي كنترل
كننده ، اشباع آن و همچنين اشباع عنصر نهايي مي شود . در چنين مواردي ، براي حذف نويز از فيلترهاي مخصوص استفاده مي
گردد.
-6 معمولاً از عمل مشتق گيري ، در كنترل فرآيندهايي با چندين ثابت زماني استفاده مي كنيم . تجربه نشان مي دهد كه
در اين حالت ؛ بهتر است زمان مشتق گيري حدود دومين يا سومين ثابت زماني بزرگ فرآيند انتخاب شود .
#28 به تنهایی اثری روی خطای ماندگار ندارد اما اجازه افزایش بهره را به دلیل افزایش پایداری و میرایی می دهد که خطای ماندگار را کاهش می دهد.
زمانی که ضریب مشتق کاهش می یابد، کنترلر تناسبی تاثیر بیشتری روی ورودی داشته و سبب می شود تا نوسانات افزایش یابد و با افزایش ضریب تاثیر کنترل مشتقی بیشتر شده و موجب می شود تا نوسانات میراتر گردند. اما افزایش بیش از حد آن خود باعث نوسانی شدن شود چرا که گین خطا را افزایش داده و به تغییرات خطا حساس می شود.
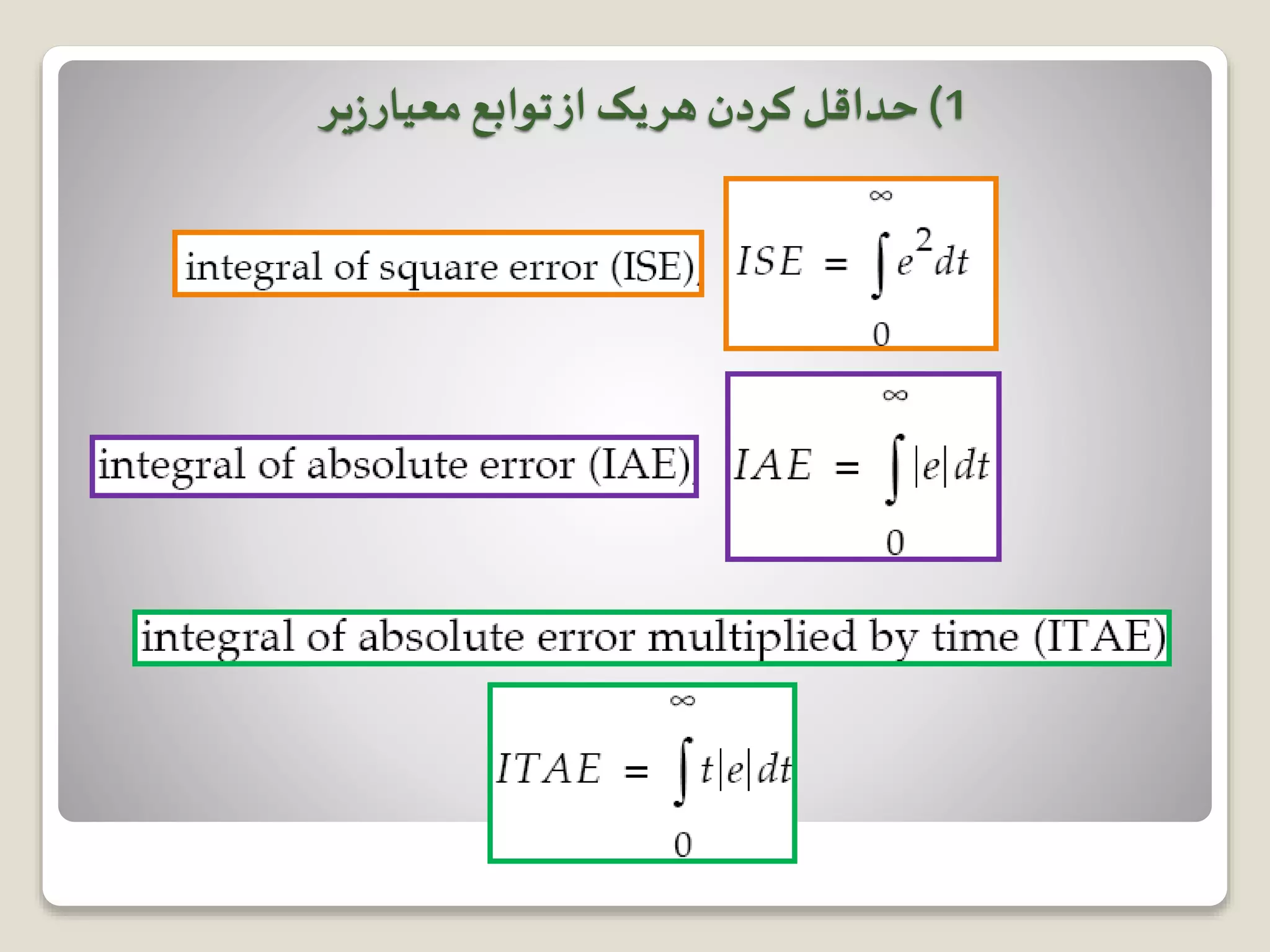
#34 معیارهای فوق بیشتر مناسب تحقق توسط کامیوترها هستند.
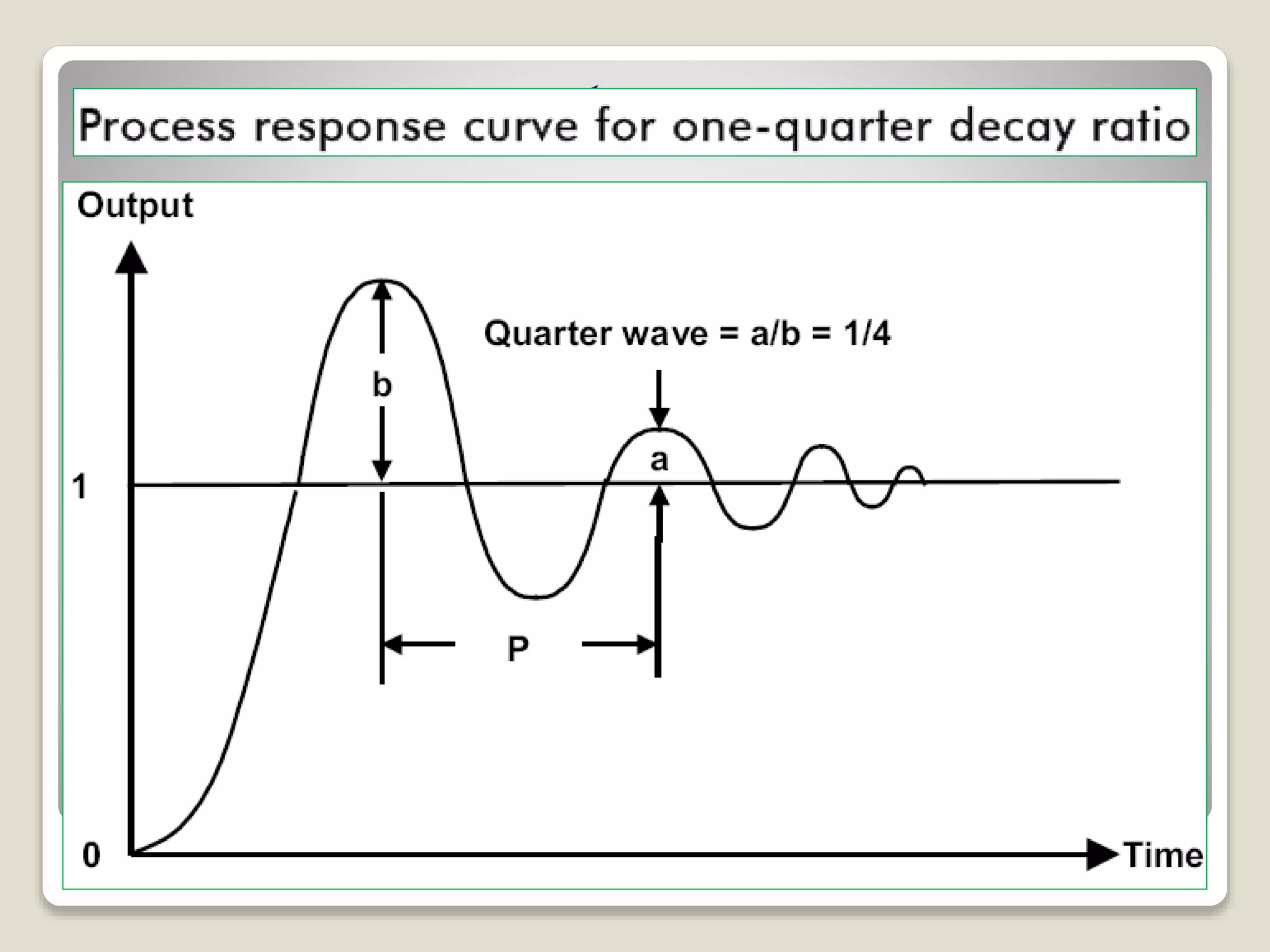
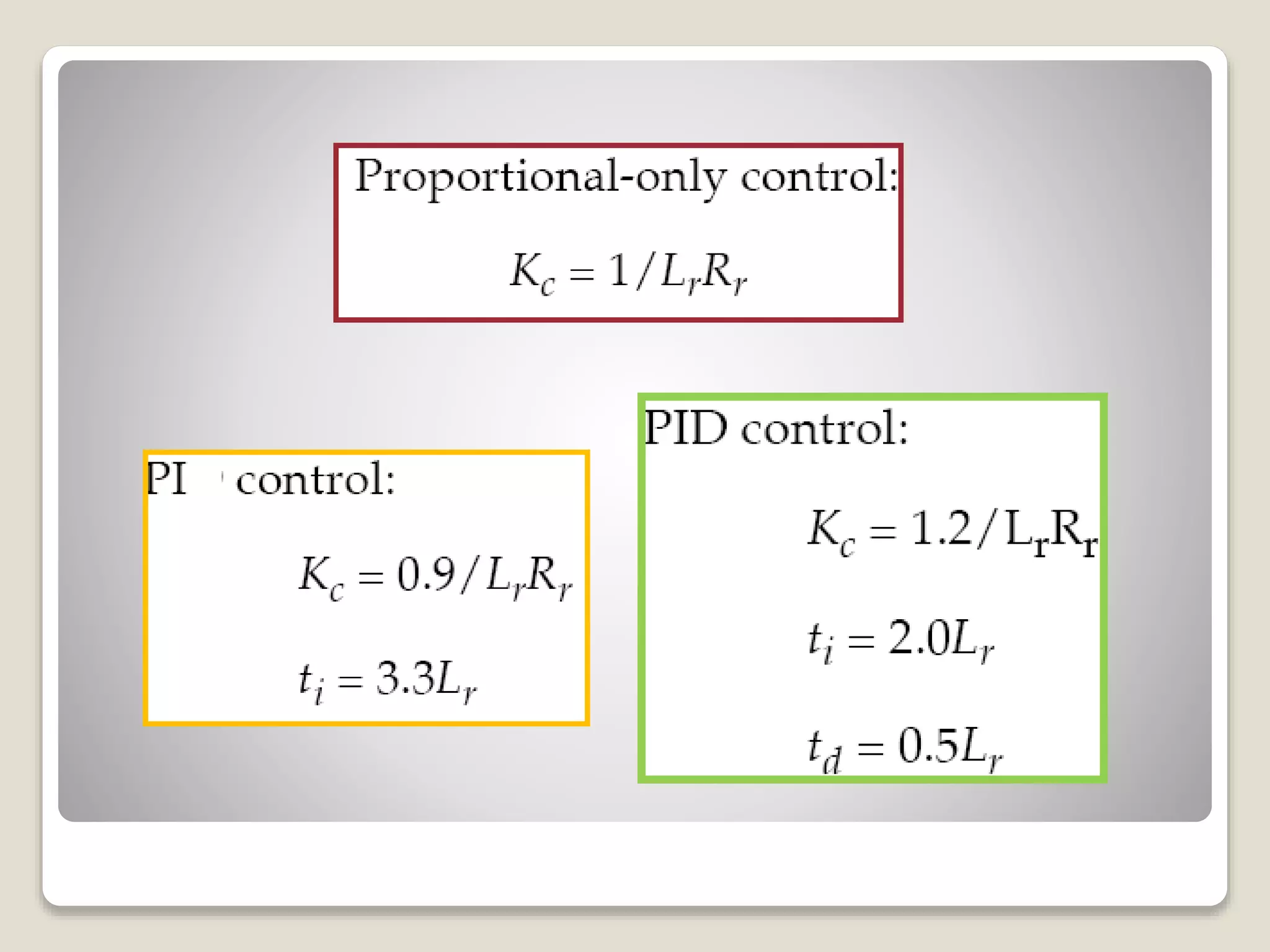
#35 اساس تنظیم پارامترها این است که نسبت پیک اورشوت اول به پیک اورشوت دوم ¼ باشد.
معیار تجربی زیگلر نیکولز با هدف پاسخ سریع سیستم (نوسان اول) و میرایی سریع است (نوسان دوم که ¼ نوسان اول است)
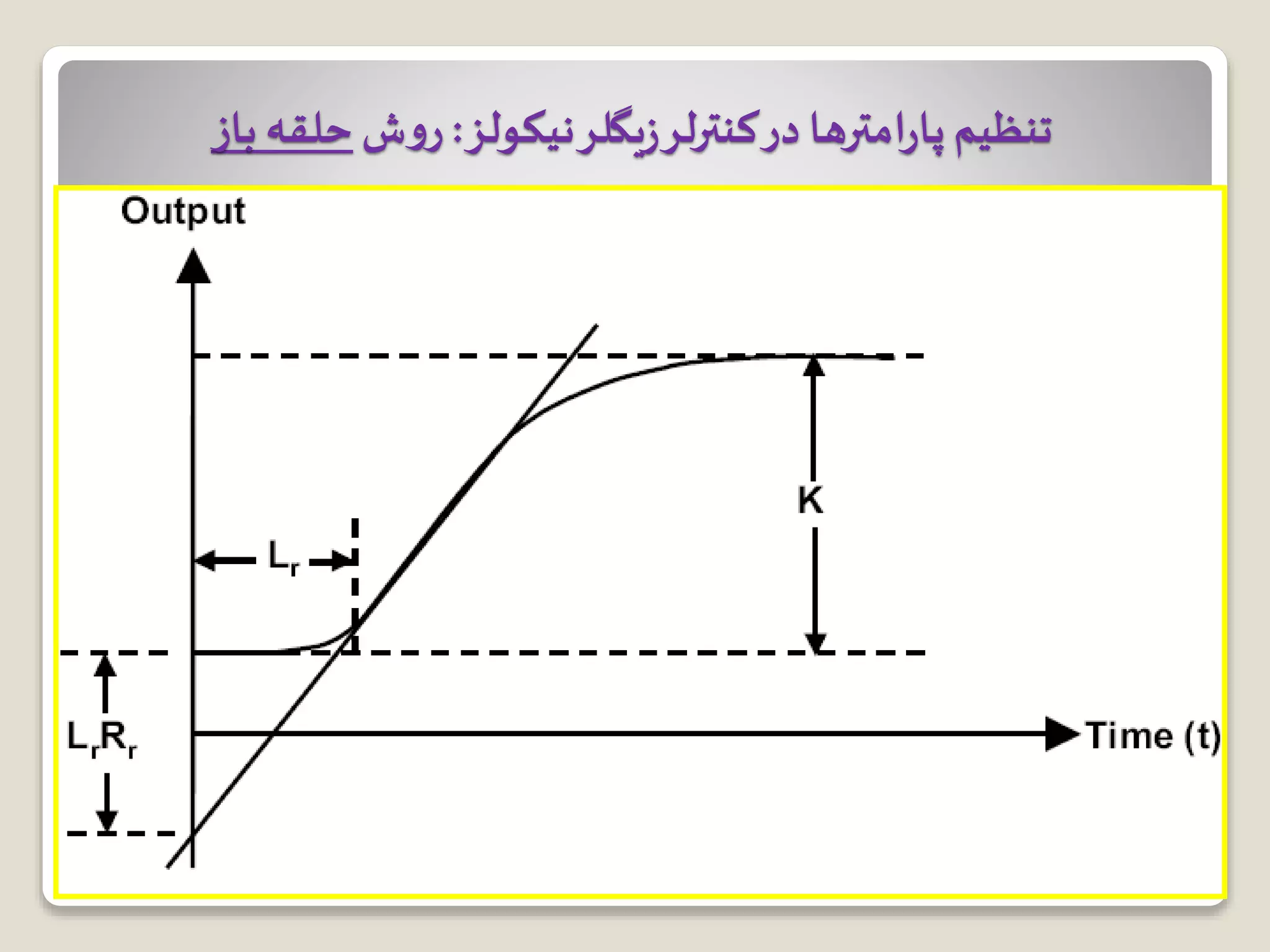
#40 در این روش در واقع تابع تبدیل سیستم مرتبه اول را که شامل تاخیر، گین نهایی، و ثابت زمانی است را شناسایی می کنیم.
Lr =K/T
#44 با افزایش زمان مشتق، پیش بینی خطا از خطای فعلی فاصله زیادی می گیرد. نوسانات اضافه شده ناشی بر خود موج سوار میشوند نه نوسانات میرای سیستم.
در حالت کلی حاشیه پایداری را مشتق گیر افزایش می دهد