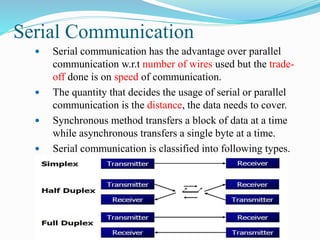
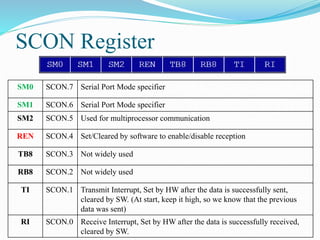
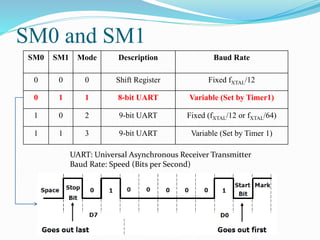
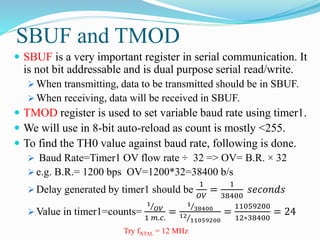
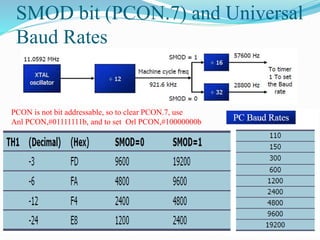
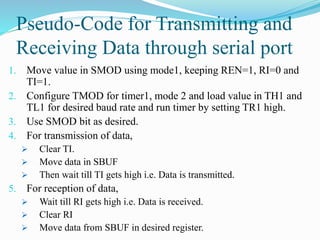
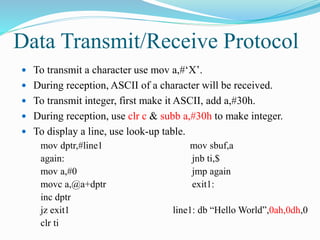
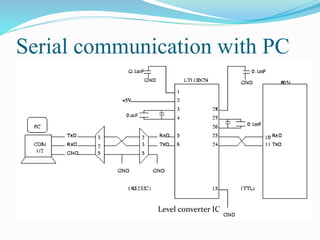
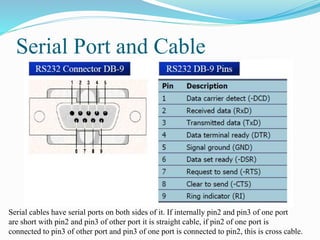
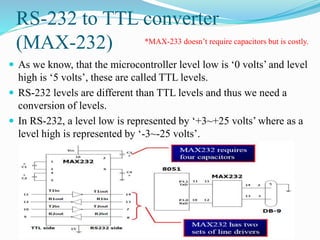
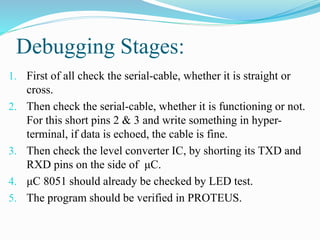
This document discusses serial communication between an 8051 microcontroller and a PC. It describes the registers involved in serial communication like SCON and TMOD. It explains how to set the baud rate using Timer1. A level converter chip like MAX232 is needed to convert voltage levels between serial ports and microcontrollers. The document provides code examples to transmit and receive data through the serial port. It discusses connecting the microcontroller to a PC using a serial cable and level shifter for debugging serial communication.