Download to read offline






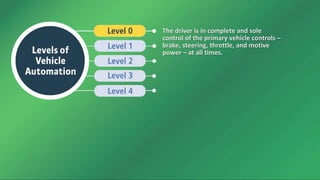
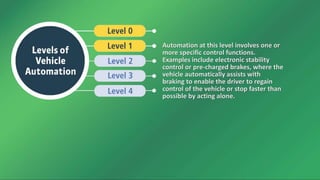
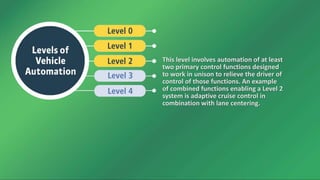
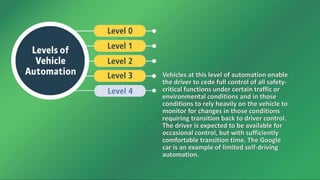
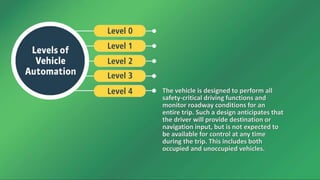











The document summarizes a meeting of the CAV Task Force. It includes an introduction, mission statement, and overview of autonomous vehicle levels from 0-5. The morning session covers introductions and a presentation on Miami-Dade County's "Ollie" pilot project with IBM. The afternoon will discuss deployment considerations, technology briefings, potential future projects, and priorities like safety and mobility. The task force aims to facilitate CAV projects and build community awareness of connected and autonomous vehicles.