Downloaded 25 times
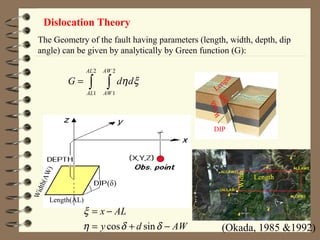









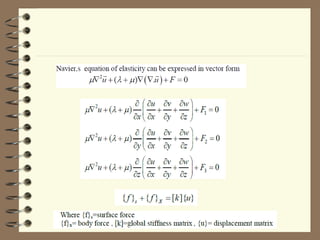





1. The document discusses different methods of modeling fault geometry and slip, including analytical Green's function methods, dislocation theory, and forward and inverse modeling approaches. 2. It also describes the Coulomb software which models fault slip using inputs of fault length, width, dip angle, strike slip, and dip slip. 3. Finite element and boundary element methods are presented for relating observed displacement data to fault source parameters through systems of equations involving the fault geometry Green's function.