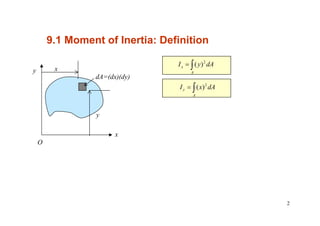
This document discusses moments of inertia, which are a measure of an object's resistance to rotational acceleration about an axis. It defines the moment of inertia of an area and introduces key concepts like the parallel axis theorem, radius of gyration, and calculating moments of inertia through integration or for composite areas. Examples are provided to demonstrate calculating moments of inertia for various shapes, including rectangles, triangles, L-shapes, and composite profiles, about different axes. The document also covers determining moments of inertia at the centroidal axes versus other axes using the parallel axis theorem.
![3
x
y
x´= Centroidal axis
y´ = Centroidal axis
CG
dy
y´
dx x´
dA
∫ +=
A
yx dAdyI 2
)'(
∫ ++=
A
yy dAddyy ])())('(2)'[( 22
∫∫∫ ++=
A
y
A
y
A
dAddAdydAy 22
)())('(2)'(
∫∫ ++=
A
y
A
yx dAddAydI
2
'2
0, y´ = 0
AdII yxx
2
0 ++=
AdII xyy
2
0 ++=
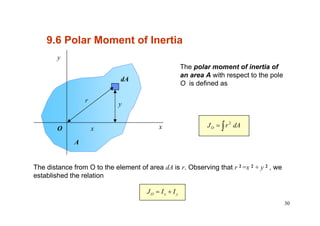
9.2 Parallel-Axis Theorem of an Area
2
AdJJ CO +=
O](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-3-320.jpg)





![9
dIx = y2 dA dA = l dy
Using similar triangles, we have
dy
h
yh
bdA
h
yh
bl
h
yh
b
l −
=
−
=
−
=
Integrating dIx from y = 0 to y = h, we obtain
∫∫
∫
−=
−
=
=
hh
x
dyyhy
h
b
dy
h
yh
by
dAyI
0
32
0
2
2
)(
12
]
43
[
3
0
43
bhyy
h
h
b h
=−=
• Moment of Inertia of a Triangular Area.
2
AdII xx +=
36
)
3
)(
2
(
12
3
2
3
2
bhhbhbh
AdII xx
=−=
−=
y
x
h
b/2
h-y
b/2
dy
yl](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-9-320.jpg)








![18
SOLUTION
75 mm
75 mm
100 mm
x
25 mm
= (dy)Cir
Ciryxctx AdI
bh
I )()
3
(
2
Re
3
+−=
Circt ])75)(25()25(
4
1
[])150)(100(
3
1
[ 224
Re
3
×+−= ππ
= 101x106 mm4](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-18-320.jpg)

![20
400
Dimension in mm
100
400
100
600
100
x
y
C
SOLUTION
A
dyA
B
dyD
D
CyxByxAyxx AdIAdIAdII )()()(
222
+++++=
])200)(300100()300)(100(
12
1
[
]0)100)(600(
12
1
[])200)(300100()300)(100(
12
1
[
23
323
×++
++×+=
= 2.9x109 mm4
0](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-20-320.jpg)
![21
400
Dimension in mm
100
400
100
600
100
x
y
C
CxyBxyAxyy AdIAdIAdII )()()(
222
+++++=
C
BA
])250)(300100()100)(300(
12
1
[
]0)600)(100(
12
1
[])250)(300100()100)(300(
12
1
[
23
323
×++
++×+=
= 5.6x109 mm4
A
dxA
dxD
D
0](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-21-320.jpg)

![23
6 mm
O
x
y
24 mm
24 mm
6 mm
12 mm12 mm
24 mm 24 mm
8 mm
SOLUTION
A
dyA
B
Ix = 390x103 mm4
mm
A
I
k x
x 9.21
)]648()488()624[(
10390 3
=
×+×+×
×
==
CyxByxAyxx AdIAdIAdII )()()(
222
+++++=
Iy = 64.3x103 mm4
CBA ])48)(6(
12
1
[])8)(48(
12
1
[])24)(6(
12
1
[ 333
++=
0 00
CxyBxyAxyy AdIAdIAdII )()()(
222
+++++=
mm
A
I
k
y
y 87.8
)]648()488()624[(
103.64 3
=
×+×+×
×
==
0
C
B
A
])27)(648()6)(48(
12
1
[
]0)48)(8(
12
1
[
])27)(624()6)(24(
12
1
[
23
3
23
×++
++
×+=
C
dyC](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-23-320.jpg)

![25
2 m
O
1 m
1 m
1 m
1 m
0.5 m0.5 m 2 m 2 m
0.5 m0.5 m
x
y
A
B
dyB
C
dyC
Ix = 46 m4
m
A
I
k x
x 599.1
)]14()24()65[(
46
=
×−×−×
==
14
2
24
2
65
2
)()()( ××× +−+−+= CyxByxAyxx AdIAdIAdII
0
C
BA
])5.1)(14()1)(4(
12
1
[
])2)(42()2)(4(
12
1
[]0)6)(5(
12
1
[
23
233
×+−
×+−+=
Iy = 46.5 m4
CBA ])4)(1(
12
1
[])4)(2(
12
1
[])5)(6(
12
1
[ 333
−−=
0 00
CxyBxyAxyy AdIAdIAdII )()()(
222
+−+−+=
m
A
I
k
y
y 607.1
)]14()24()65[(
5.46
=
×−×−×
==](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-25-320.jpg)

![27
1 cm 1 cm
5 cm
1 cm
5 cm
x
y
CG
Y
∑∑ = AyAY
cm
Y
5.2
)15(3
)51)(5.0()]15)(5.3[(2
=
×
×+×
=
4
2
2
25.51
)5.2)(15(145
cm
AdII yxx
=
−=
−=
• Moments of inertia about centroid
4
23
23
25.51
])2)(15()1)(5(
12
1
[(
])1)(15()5)(1(
12
1
[(2
cm
I
OR
x
=
×++
×+=
cm
A
I
kk x
yx 848.1
15
25.51
====
4
323
145
)1)(5(
3
1
])5.3)(15()5)(1(
12
1
[(2
cm
Ix
=
+×+=
• Moments of inertia about x axis
4
323
25.51
)5)(1(
12
1
])2)(15()1)(5(
12
1
[(2
cm
II yy
=
+×+==
0.5
3.5
2](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-27-320.jpg)

![29
229 mm
172 mm
SOLUTION
19 mm
358 mm x
O
C x´
Y
188.5 mm
The wide-flange shape of W360 x 57
found by referring to Fig. 9.13
A = 7230 mm2 4
2.160 mmIx =
AyAY Σ=Σ
Aplate = (229)(19) = 4351 mm2
)7230)(0()4351)(5.188()72304351( +=+Y
mmY 8.70=
• Centroid
• Moment of Inertia
flangewidexplatexx III −+= )()( '''
flangewidexplatex YAIAdI −+++= )()( 2
'
2
'
[ ]
46
26
23
108.256
)8.70)(7230(102.160
)8.705.188)(4351()19)(229(
12
1
mm×=
+×+
−+=
• Radius of Gyration
)72304351(
108.256 6
'2
'
+
×
==
A
I
k x
x
mmkx 149' =
46
' 10257 mmIx ×=
d](https://image.slidesharecdn.com/09review-151108003803-lva1-app6892/85/09-review-29-320.jpg)