Downloaded 139 times
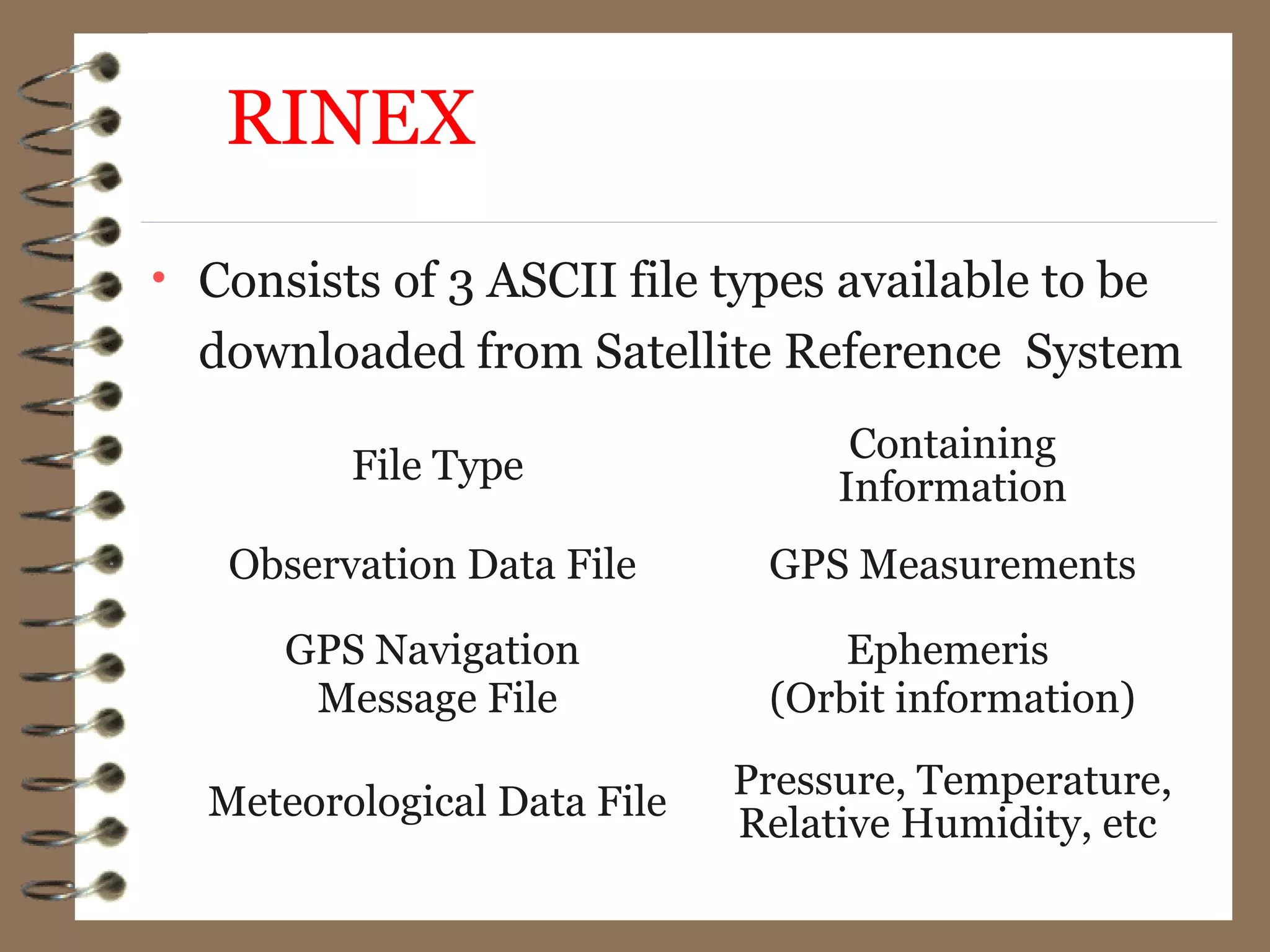
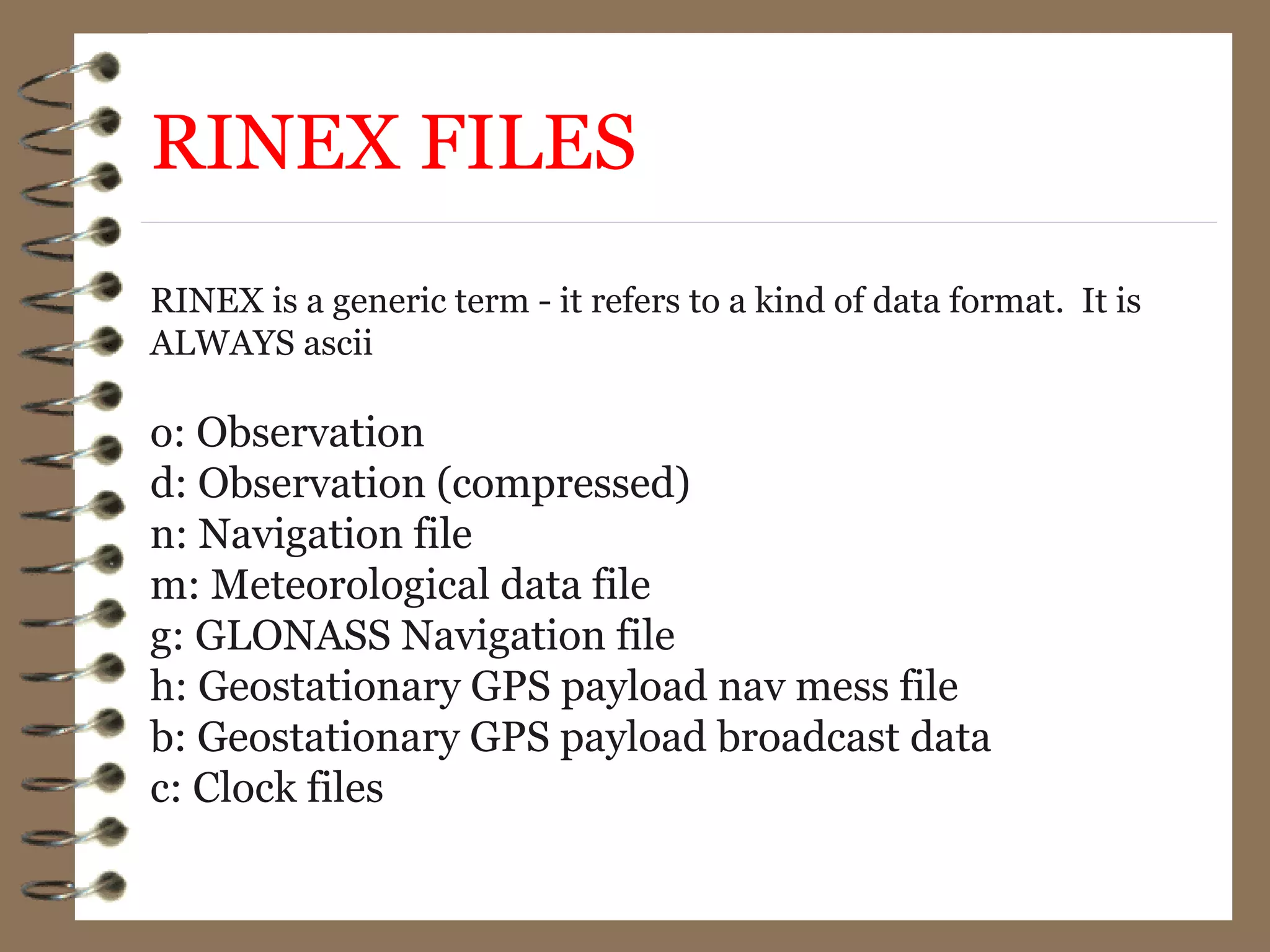
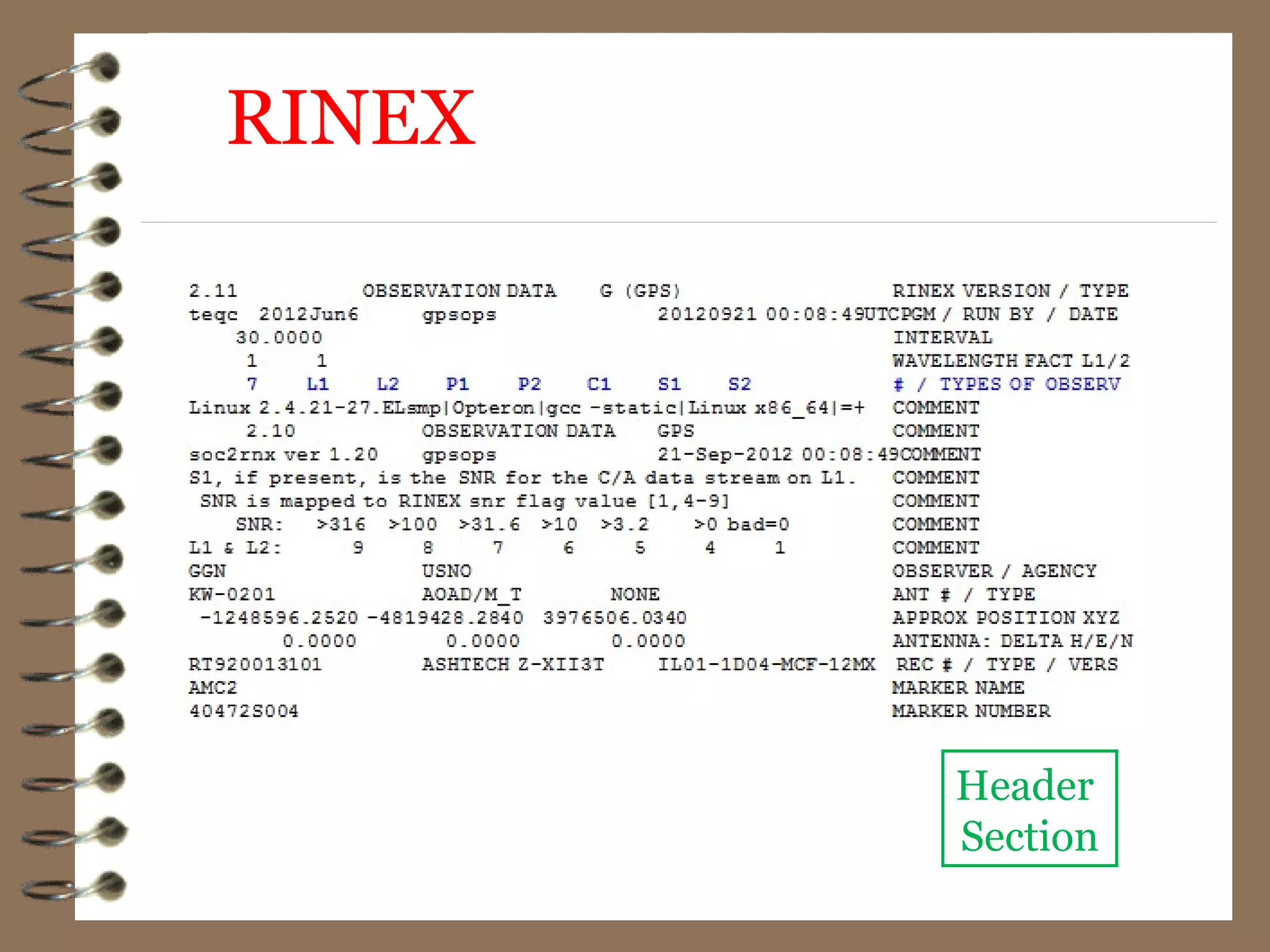
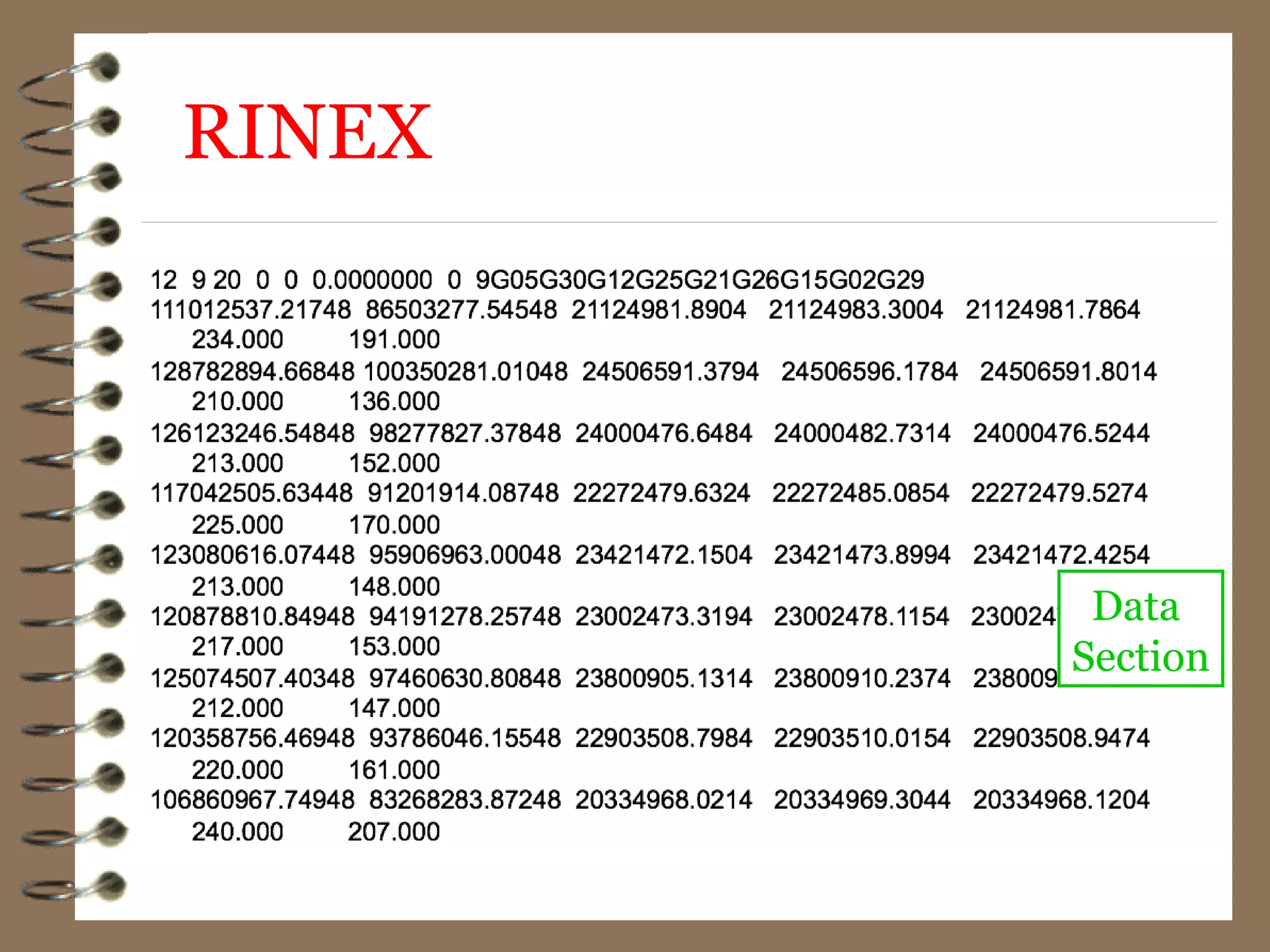
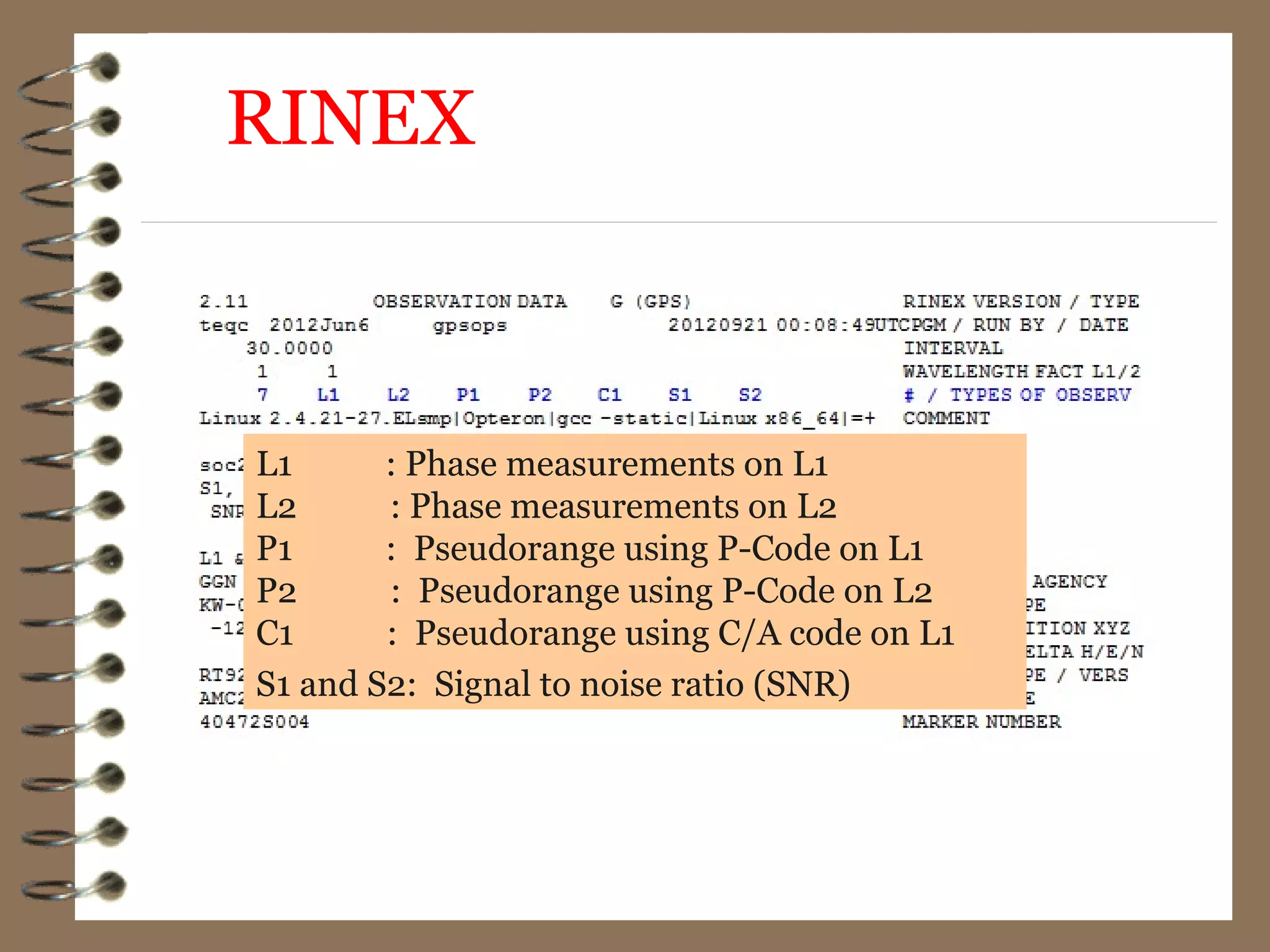
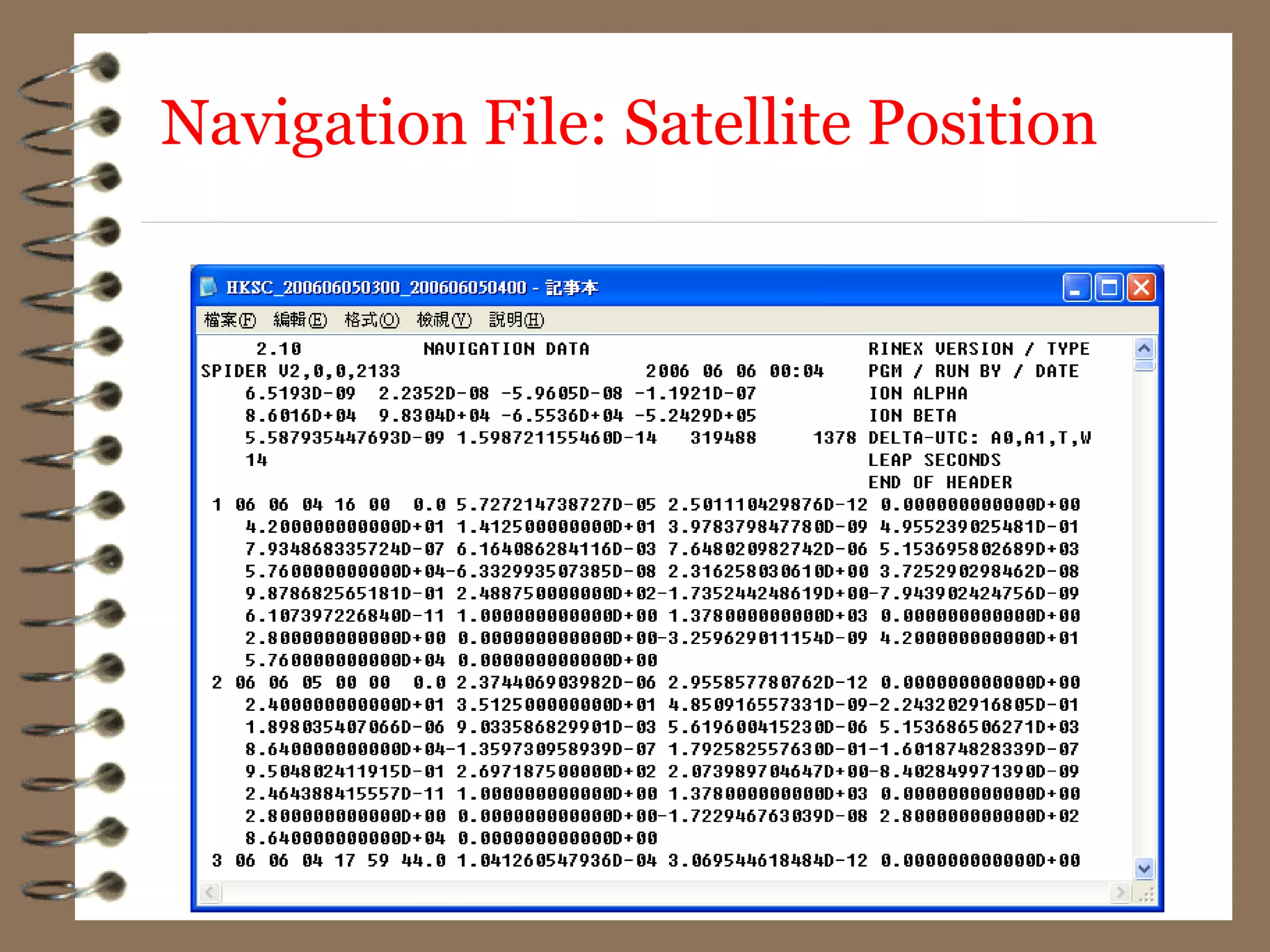
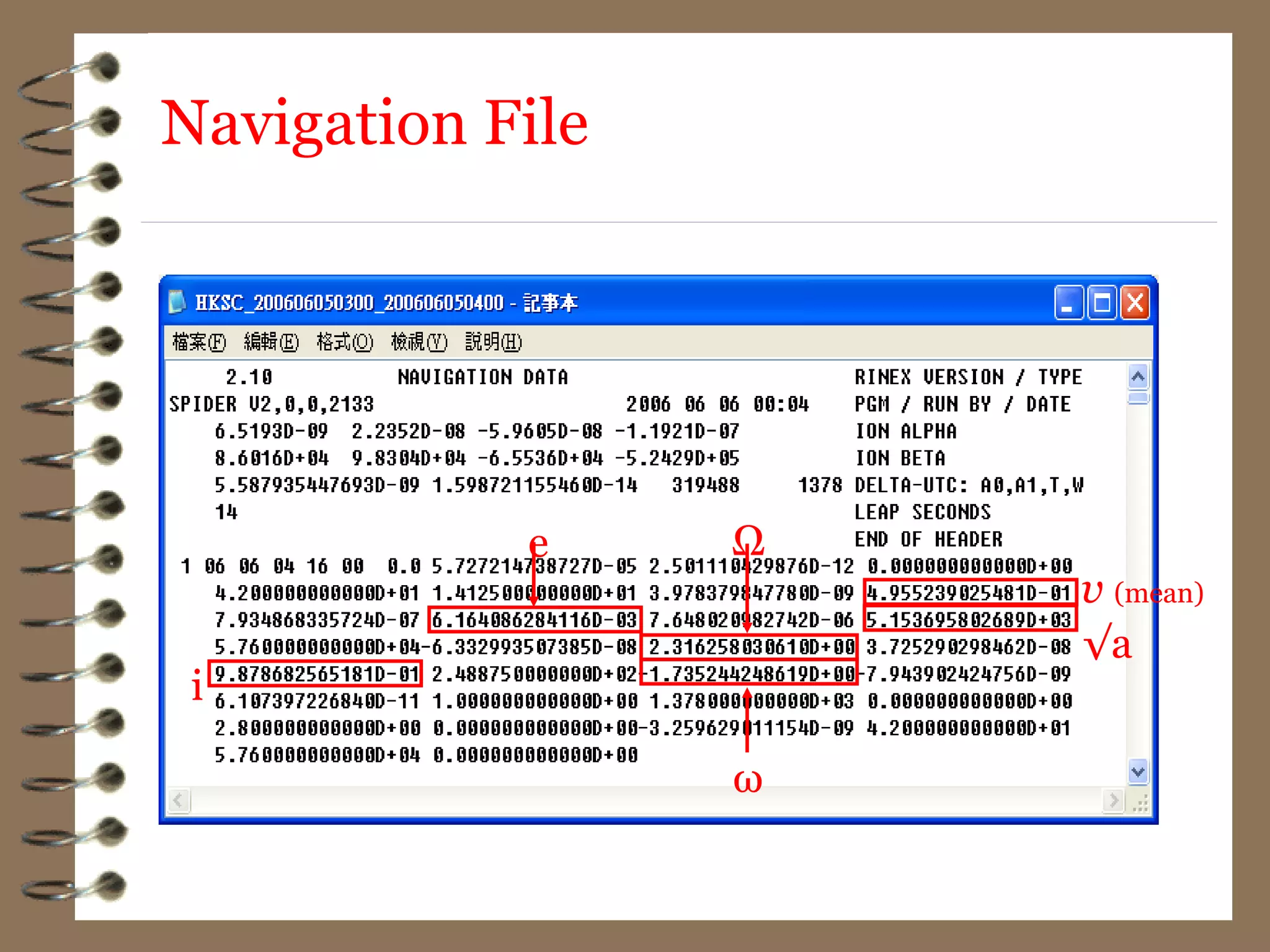

RINEX files contain GPS data collected at receiver stations in an open format to allow for processing using different software. There are three main types of RINEX files - observation data files containing GPS measurements, navigation message files containing ephemeris data, and meteorological files. GAMIT and GLOBK are widely used open source software for processing and combining GNSS data. GAMIT analyzes GPS data to estimate parameters like station positions and satellite orbits through least squares estimation. GLOBK combines solutions from different techniques like GPS, SLR, VLBI using their parameter estimates and covariance matrices.