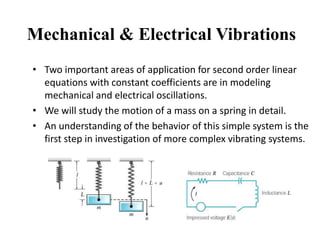
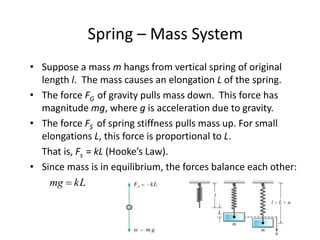
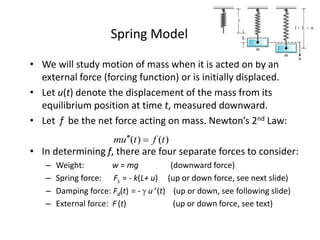
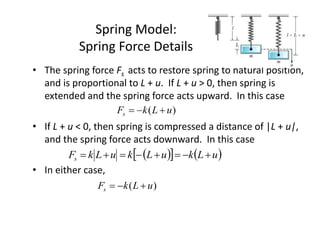
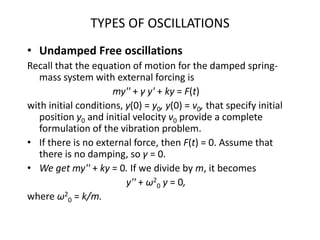
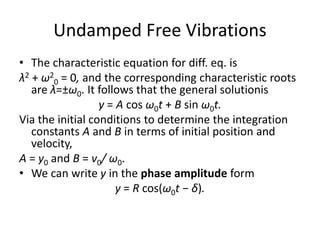
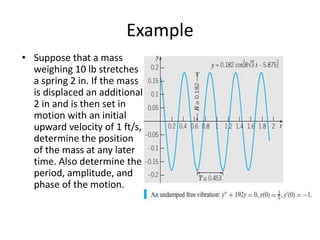
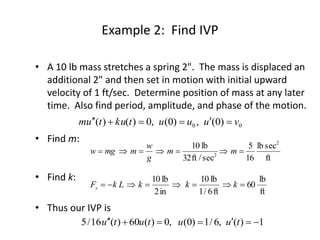
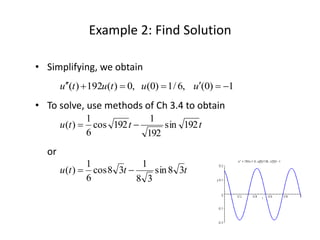
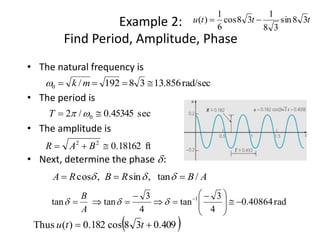
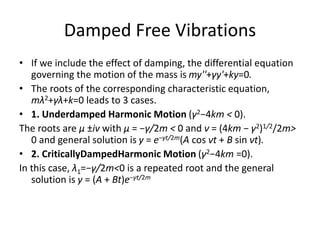
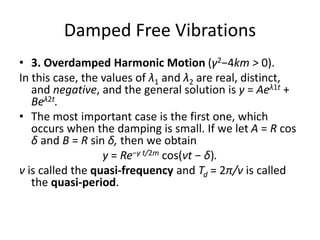
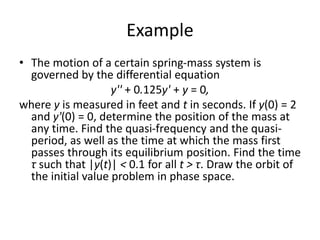
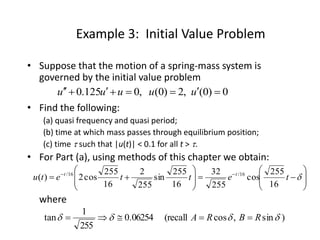
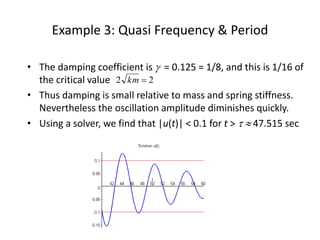
The document introduces second order differential equations and their solutions. It defines an initial value problem for a second order equation as consisting of the equation and two initial conditions. Linear equations are introduced, which can be written in standard form or with constant or variable coefficients. The dynamical system formulation converts a second order equation to a system of first order equations. Undamped and damped free vibrations are discussed. Examples are provided, including finding the solution to an initial value problem, and determining the quasi-frequency, quasi-period, and equilibrium crossing time.




































































![Week 8 [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/week8compatibilitymode-130213163443-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




























