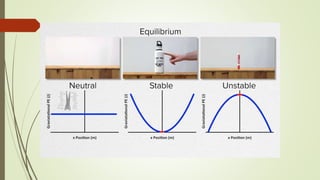
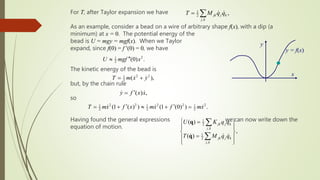
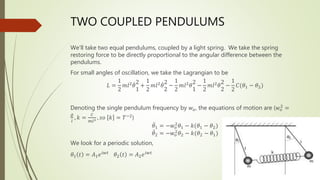
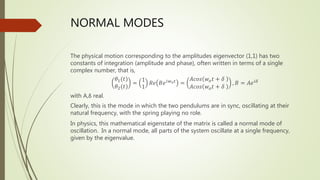
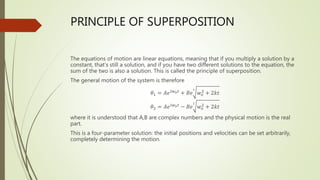
This document summarizes classical dynamics and small amplitude oscillations. It discusses oscillatory motion near equilibrium positions and developing the theory using Lagrange's equations. Normal modes of coupled oscillating systems are explored, where the normal coordinates represent eigenvectors that oscillate at characteristic frequencies. The principles of superposition and matrix representations are used to analyze examples like two coupled pendulums and a system of two masses connected by three springs.
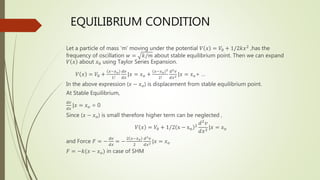



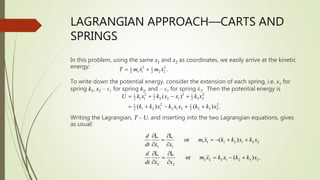
![FIRST NORMAL MODE
First insert , so that the relation
As a check, you can see that the determinant of this matrix is zero. The solutions are
then
These are both the same equation, and simply says that a1 = a2 = Ae-i. Since
we finally have
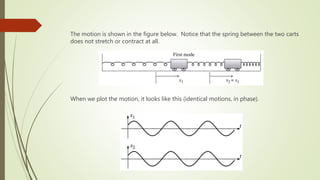
That is, both carts move in unison:
2
1 .
k k
k k
w
-
-
-
K M
1 /
k m
w
1 1 2
2
2 1 2
0
1 1
( ) 0 or .
0
1 1
a a a
k
a a a
w
-
-
-
-
-
K M a
1 1
1 1 ( )
2 2
( )
( ) ,
( )
i t i t
z t a A
t e e
z t a A
w w
-
z
1
1
2
( )
( ) cos( ).
( )
x t A
t t
x t A
w
-
x
1 1
2 1
( ) cos( )
[first normal mode].
( ) cos( )
x t A t
x t A t
w
w
-
-](https://image.slidesharecdn.com/smallamplitudeoscillations-210423141137/85/Small-amplitude-oscillations-22-320.jpg)
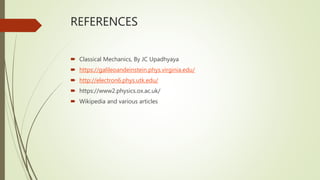
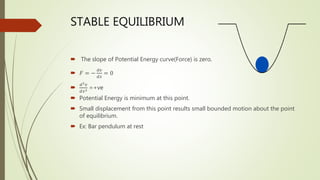
![SECOND NORMAL MODE
Now insert , so that the relation
As a check, you can see that the determinant of this matrix is zero. The solutions are then
These are again both the same equation, and simply says that a1 = -a2 = Ae-i. Since
we finally have
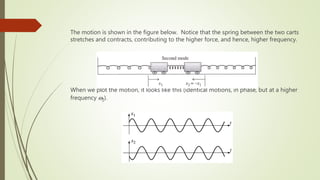
That is, both carts move oppositely:
2
1 .
k k
k k
w
- -
-
- -
K M
2 3 /
k m
w
1 1 2
2
2 1 2
0
1 1
( ) 0 or .
0
1 1
a a a
k
a a a
w
- -
K M a
2 2
1 1 ( )
2 2
( )
( ) ,
( )
i t i t
z t a A
t e e
z t a A
w w
-
-
z
1
2
2
( )
( ) cos( ).
( )
x t A
t t
x t A
w
-
-
x
1 2 nd
2 2
( ) cos( )
[2 normal mode].
( ) cos( )
x t A t
x t A t
w
w
-
- -](https://image.slidesharecdn.com/smallamplitudeoscillations-210423141137/85/Small-amplitude-oscillations-24-320.jpg)
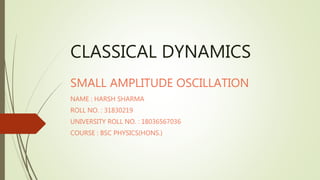
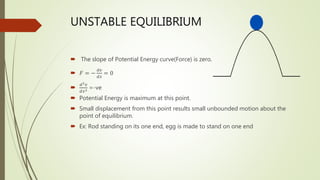
![NORMAL COORDINATES
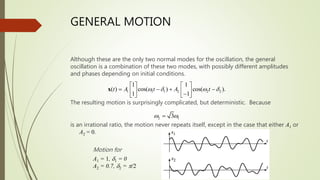
If the motion seems complicated, you should realize that there is an underlying
simplicity that is masked by our choice of coordinates. We can just as easily choose
for our coordinates the so-called normal coordinates
Using these coordinates, as you can easily check, the two normal modes are no longer
mixed, but instead we have:
1
1 1 2
2
1
2 1 2
2
( )
( ).
x x
x x
-
1 1
2
1
2 2
( ) cos( )
. [first normal mode]
( ) 0
( ) 0
. [second normal mode]
( ) cos( )
t A t
t
t
t A t
w
w
-
- ](https://image.slidesharecdn.com/smallamplitudeoscillations-210423141137/85/Small-amplitude-oscillations-27-320.jpg)