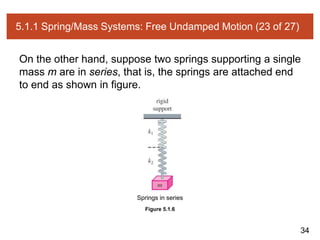
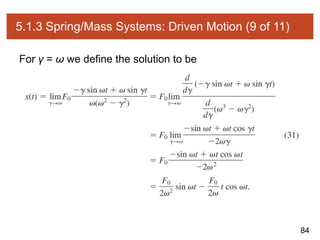
The document discusses modeling techniques for linear dynamical systems using second-order differential equations with constant coefficients, focusing on spring/mass systems undergoing free motion. Key concepts include initial-value problems, state equations, and the behaviors of undamped and damped motion, with detailed explanations of displacement, velocity, and spring forces. It also explores variations such as double spring systems and systems with variable spring constants.