![Definisi Vektor
A real n-vector is an ordered sequence of n real numbers (sometimes
referred to as an ordered n-tuple of real numbers).
The set of all n-vectors is denoted Rn.
Contoh:
R2 adalah himpunan dari 2-vectors (ordered 2-tuples = ordered pairs) dari bilangan
real; misalnya [2, 3]T dan [1.444, –6.67]T.
R3 adalah himpunan dari 3-vectors (ordered 3-tuples = ordered triples) dari bilangan
real; misalnya [1, 2, 11]T dan [0, 68, –3]T.
† Cara menuliskan vektor:
• Tulisan tangan: huruf latin kecil dengan anak panah di atasnya
• Cetak/komputer: huruf latin kecil yang dicetak tebal v
‡ Secara konvensional, vektor ditulis sebagai vektor kolom,
sehingga vektor dengan anggota/entri/komponen 2 dan 3 ditulis dengan atau
3
2
v
v
simbol transpose
.T
32v 1-3](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-3-2048.jpg)
![Vektor yang semua entri (anggota)-nya bernilai 0 (nol) disebut vektor nol.
Contoh: Dalam R2 vektor nol-nya adalah: [0, 0]T dan [0, 0, 0]T dalam R3.
Dua buah vektor dalam Rn dikatakan sama jika dan hanya jika semua entri yang
bersesuaian nilainya sama; sehingga: [x1, x2, …, xn]T = [y1, y2, …, yn]T jika dan
hanya jika x1 = y1, x2 = y2, …, xn = yn.
Contoh 1.1
Cari a, b, dan c apabila [a, 3b, –2c]T = [3, 6, 10]T!
Karena kedua vektor sama, maka: a = 3; 3b = 6 b = 2; –2c = 10 c = –5.
Bilangan tunggal (seperti 2 atau –4 atau 7) sering disebut skalar untuk membedakan
dengan vektor.
1-4](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-4-2048.jpg)
![Suatu vektor dalam R2 sering direpresentasikan sebagai pergerakan dari satu titik
ke titik lainnya dalam sistem koordinat dua dimensi.
Contoh: Dari titik awal (3, 2) ke titik akhir (1, 5), terjadi pengurangan dua unit pada
sumbu-x dan penambahan tiga unit pada sumbu-y; sehingga vektor yang me-
representasikan pergerakan ini adalah [–2, 3]T.
Perhatikan!
Komponen dari suatu vektor ditulis dalam kurung siku [];
sedangkan posisi/koordinat dari suatu titik ditulis dalam
tanda kurung ().
Nama titik dalam suatu sistem koordinat ditulis dengan
huruf kapital yang dicetak miring, misalnya A(3, 2).
Gambar 1.1. Pergerakan yang direpresentasikan oleh vektor [–2, 3]T
1-5](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-5-2048.jpg)
![Suatu vektor dalam R3 sering direpresentasikan sebagai pergerakan dari satu titik
ke titik lainnya dalam sistem koordinat tiga dimensi.
Contoh: Dari titik awal (2, 3, –1) ke titik akhir (4, 1, 5), terjadi penambahan dua unit
pada sumbu-x, pengurangan dua unit pada sumbu-y, dan penambahan enam unit
pada sumbu-z; sehingga vektor yang merepresentasikan ini adalah [2, –2, 6]T.
Memvisualisasikan vektor dalam R4 (atau yang
lebih tinggi) adalah tidak mungkin karena
titik terletak pada sistem koordinat empat
dimensi (atau yang lebih tinggi).
Namun hal ini bisa dilakukan, sehingga [2, 7, –3,
10]T merepresentasikan pergerakan dari titik
(5, –6, 2, –1) ke (7, 1, –1, 9) dalam sistem
koordinat empat dimensi.
Gambar 1.2. Pergerakan yang direpresentasikan oleh vektor [2, –2, 6]T
T
bisa dibayangkan; tidak bisa digambarkan
1-6](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-6-2048.jpg)
![Definisi
Panjang (atau juga disebut sebagai norm atau besar) dari suatu
vektor a = [a1, a2, …, an]T dalam Rn adalah ‖a‖ = .
22
2
2
1 naaa
Contoh 1.2
Cari panjang dari vektor a = [4, –3, 0, 2]T!
‖a‖ =
Setiap vektor yang mempunyai panjang 1 (satu) disebut unit vector.
Contoh: [3/5, –4/5]T adalah unit vector dalam R2.
Standard unit vector adalah unit vector yang satu komponennya bernilai 1 (satu)
dan lainnya bernilai 0. Contoh: Dalam R3 terdapat tiga standar unit vectors, yaitu:
i = [1, 0, 0]T, j = [0, 1, 0]T, dan k = [0, 0, 1]T.
.29409162034 2222
1-7](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-7-2048.jpg)
![Proses “membagi” vektor dengan panjangnya untuk mendapatkan unit vector disebut
proses normalisasi vektor.
Contoh 1.3
Cari unit vector dari vektor x = [2, 3, –1, 1]T!
TTT
15
1
,
15
1
,
15
3
,
15
2
15
1,1,3,2
1132
1,1,3,2
x
x
u
2222
Teorema 1.1
Jika x adalah vektor taknol dalam Rn, maka adalah unit vector.
x
x
u
1-8](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-8-2048.jpg)
![Teorema 1.2
Jika x Rn dan c adalah skalar (bilangan real),
maka ‖cx‖ = |c| ‖x‖; atau dengan kata lain:
Panjang vektor cx adalah nilai absolut dari c
dikalikan dengan panjang vektor x.
Contoh: Jika x = [4, –5]T, maka 2x = [8, –10]T; 3x = [12, –15]T ; dan 0.5x = [2, –5/2]T.
Dalam Rn, perkalian vektor dengan skalar c akan
memperpanjang vektor tersebut apabila |c| > 0
dan akan memperpendek vektor apabila |c| < 0.
Definisi
Jika x = [x1, x2, …, xn]T adalah vektor dalam Rn, dan c adalah skalar
(bilangan real), maka cx (perkalian skalar antara vektor x dengan c),
adalah suatu vektor [cx1, cx2, …, cxn]T.
Gambar 1.3. Perkalian skalar dengan vektor [4, –5]T
1-9](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-9-2048.jpg)
![Contoh:
• Vektor [1, –3, 2]T dan [3, –9, 6]T adalah paralel/sejajar dalam arah yang sama
(same direction) karena [3, –9, 6]T = 3[1, –3, 2]T atau [1, –3, 2]T = ⅓ [3, –9, 6]T.
• Vektor [–2, 4, 0, 10]T dan [4, –8, 0, –20]T adalah paralel/sejajar dalam arah yang
berlawanan karena [4, –8, 0, –20]T = –2[–2, 4, 0, 10]T.
Definisi
Dua vektor taknol x dan y dalam Rn berada dalam arah yang sama jika
dan hanya jika terdapat suatu bilangan real positif sehingga y = cx.
Dua vektor taknol x dan y dalam Rn berada dalam arah yang berlawanan
jika dan hanya jika terdapat suatu bilangan real negatif sehingga y = –cx.
Dua vektor taknol dikatakan paralel/sejajar jika dan hanya jika keduanya
berada dalam arah yang sama atau dalam arah yang berlawanan.
1-10](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-10-2048.jpg)
![Definisi
Jika x = [x1, x2, …, xn]T dan y = [y1, y2, …, yn]T adalah vektor dalam
Rn, maka x + y atau penjumlahan vektor x dan y adalah [x1 + y1, x2 +
y2, …, xn + yn]T dalam Rn.
Gambar 1.4. Contoh penjumlahan vektor dalam R2 Gambar 1.5. Contoh pengurangan vektor dalam R2
Apabila –y dianggap sebagai perkalian skalar –1y, maka pengurangan vektor y
terhadap vektor x dapat didefinisikan sebagai penjumlahan dua buah vektor
tersebut sebagai berikut: x – y = x + (–y).
Perhatikan!
Dua buah vektor tidak dapat
ditambahkan (atau dikurangkan)
kecuali keduanya mempunyai jumlah
komponen atau anggota yang sama!
1-11](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-11-2048.jpg)
![Teorema 1.4
Jika x = [x1, x2, …, xn]T adalah vektor dalam Rn dan c adalah skalar (bilangan real);
sehingga apabila cx = 0, maka x = 0 atau c = 0.
Teorema 1.3
Jika x = [x1, x2, …, xn]T, y = [y1, y2, …, yn]T, dan z = [z1, z2, …, zn]T adalah vektor dalam
Rn; c dan d adalah skalar (bilangan real), 0 adalah vektor 0 dalam Rn; maka:
1) x + y = y + x Hukum komutatif penjumlahan
2) x + (y + z) = (x + y) + z Hukum asosiatif penjumlahan
3) 0 + x = x + 0 = x Vektor 0 sebagai elemen identitas dari penjumlahan
4) x + (–x) = (–x) + x = 0 Vektor (–x) elemen invers dari penjumlahan
5) c(x + y) = cx + cy Hukum distributif perkalian skalar untuk penjumlahan
6) (c + d)x = cx + dx Hukum distributif perkalian skalar untuk penjumlahan
7) (cd)x = c(dx) Asosiativitas perkalian skalar
8) 1x = x 1 merupakan elemen identitas untuk perkalian skalar
1-12](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-12-2048.jpg)
![Contoh 1.4
Seorang laki-laki berenang di sungai dengan kecepatan 5 km/jam ke arah timur. Jika
arus air sungai mempunyai kecepatan 3 km/jam ke arah barat laut, berapa
resultan (total) kecepatan-nya (arah dan besar)?
v1 = 5 ke arah timur
v1 = [5, 0]T
v2 = 3 ke arah barat laut
v2 = [3 cos 135°, 3 sin 135°]T
v2 = [–(3√2)/2, (3√2)/2]T
R = v1 + v2 = [5 – ((3√2)/2), (3√2)/2]T
R ≈ [2.88, 2.12]T
‖R‖ ≈ 3.58 km/jam
TT
T
1-13](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-13-2048.jpg)
![Contoh 1.5
Suatu benda dengan massa 5 kg ditarik oleh dua buah gaya: F1 = 10 N pada arah
[–2, 1, 2]T dan F2 = 20 N pada arah [6, 3, –2]T . Berapa percepatan yang dialami
oleh benda tersebut?
Pertama kita harus me-normalisasi kedua vektor arah tersebut agar tidak mem-
pengaruhi besarnya vektor gaya:
F1 = F2 =
F = F1 + F2 =
a = F/m = ‖a‖ = 3.18 m/s2
T
T
T
21,2,
3
10
21,2,
21,2,10
T
T
T
2,3,6
7
20
2,3,6
2,3,620
T
21
20
,
21
250
,
21
220
TT
21
4
,
21
50
,
21
44
21
20
,
21
250
,
21
220
5
1
1-14](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-14-2048.jpg)
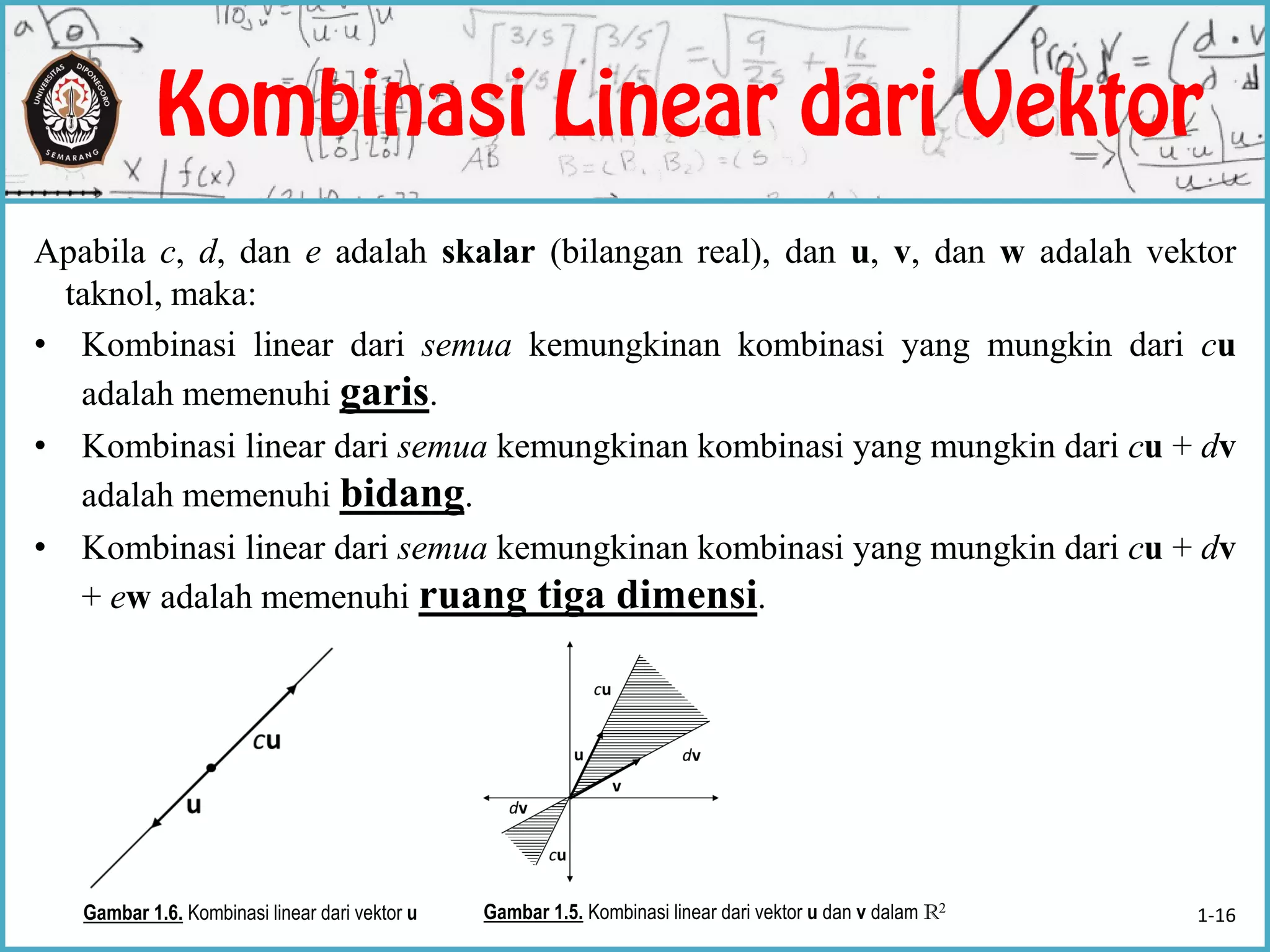
![Setiap vektor dalam Rn dapat dinyatakan sebagai kombinasi linear dari standard unit
vectors: e1 = [1, 0, 0, …, 0]T, e2 = [0, 1, 0, …, 0]T, …, en = [0, 0, 0, …, 1]T.
Contoh: vektor [3, –2, 5]T dalam R3 dapat dinyatakan sebagai kombinasi linear dari i,
j, dan k: 3[1, 0, 0]T –2[0, 1, 0]T + 5[0, 0, 1]T = 3i – 2j + 5k.
Untuk satu buah vektor u, maka satu-satunya kombinasi linearnya adalah cu.
Untuk dua buah vektor u dan v, maka kombinasi linearnya adalah cu + dv.
Untuk tiga buah vektor u, v, dan w, maka kombinasi linearnya adalah cu + dv + ew.
Definisi
Jika v1, v2, …, vk adalah vektor dalam Rn, maka v adalah kombinasi
linear dari v1, v2, …, vk jika dan hanya jika terdapat bilangan skalar
c1, c2, …, ck yang memungkinkan v = c1v1 + c2v2 + … + ckvk.
1-15](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-15-2048.jpg)
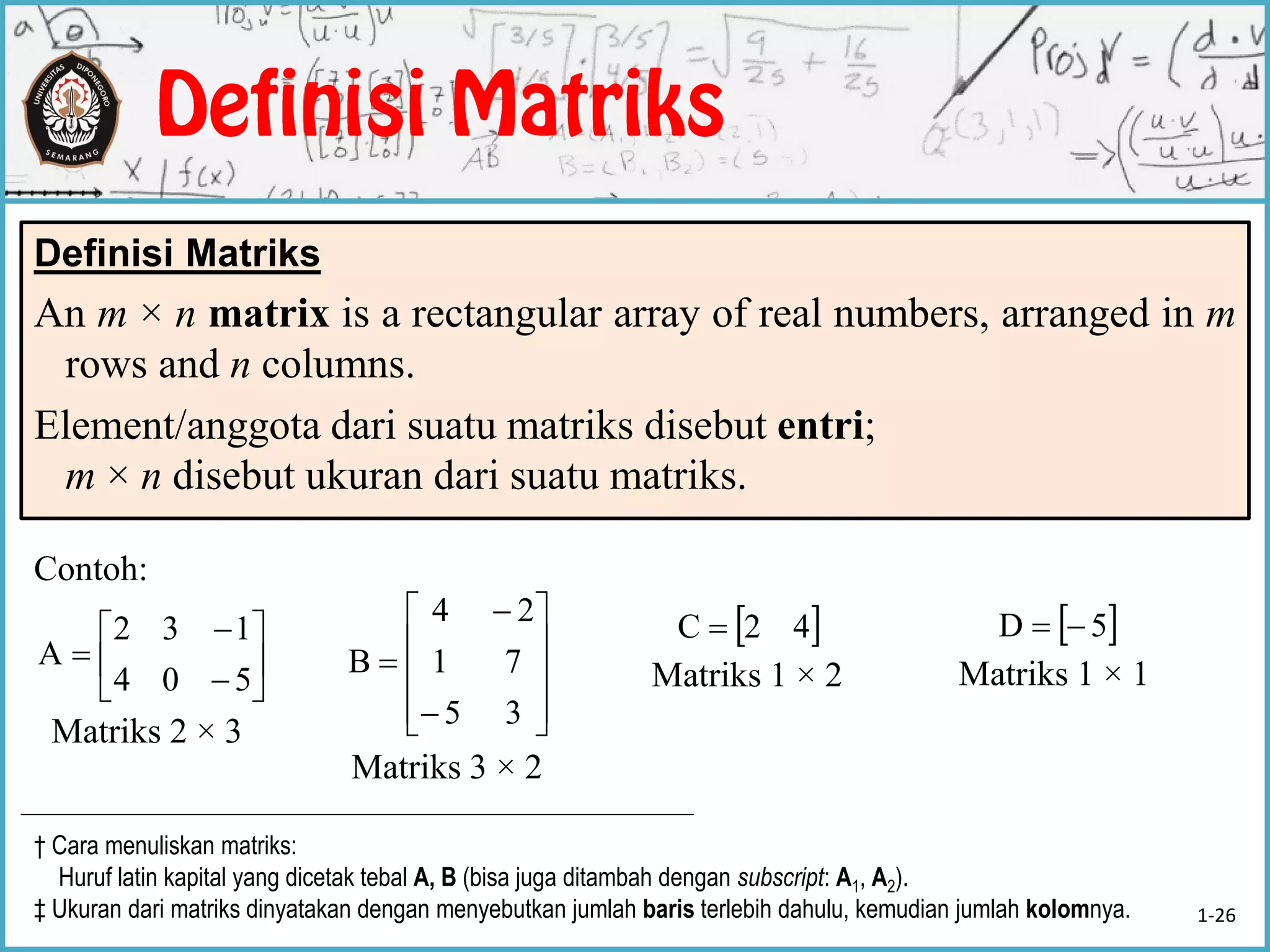
![Definisi
Jika x = [x1, x2, …, xn]T dan y = [y1, y2, …, yn]T adalah vektor dalam
Rn, maka hasil kali titik (dot/inner product) dari x dan y adalah:
x ·y = x1y1 + x2y2 + … + xnyn =
n
k
kk yx
1
.
Contoh 1.6
Temukan hasil dot product dari kedua vektor berikut ini: [2, –4, 3]T dan [1, 5, –2]T.
Hasil dot product = (2)(1) + (–4)(5) + (3)(–2) = –24.
Perhatikan!
• Hasil dari dot product adalah skalar
• Dot product hanya berlaku untuk dua vektor yang
mempunyai jumlah komponen atau anggota yang sama!
1-17](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-17-2048.jpg)
![Teorema 1.5
Jika x = [x1, x2, …, xn]T, y = [y1, y2, …, yn]T, dan z = [z1, z2, …, zn]T adalah vektor dalam
Rn, c adalah skalar (bilangan real); maka:
1) x ·y = y ·x Hukum komutatif dot product
2) x ·x = ‖x‖2 ≥ 0 Hubungan antara dot product dengan panjang vektor
3) x ·x = 0 jika dan hanya jika x = 0
4) c(x ·y) = (cx) ·y = x ·(cy) Hubungan antara perkalian skalar dengan dot product
5) x ·(y + z) = (x ·y) + (x ·z) Hukum distributif dot product untuk penjumlahan
6) (x + y) ·z = (x ·z) + (y ·z) Hukum distributif dot product untuk penjumlahan
Teorema 1.6 (Pertidaksamaan Segitiga/Pertidaksamaan Minkowski)
Jika x = [x1, x2, …, xn]T dan y = [y1, y2, …, yn]T adalah vektor dalam Rn; maka:
‖x + y‖ ≤ ‖x‖ + ‖y‖.
1-18](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-18-2048.jpg)
![Teorema 1.7 (Pertidaksamaan Cauchy-Schwarz)
Jika x = [x1, x2, …, xn]T dan y = [y1, y2, …, yn]T adalah vektor dalam Rn; maka:
|x ·y| ≤ (‖x‖)(‖y‖).
Contoh 1.7
Verifikasi pertidaksamaan Cauchy-Schwarz untuk vektor x = [–1, 4, 2, 0, –3]T dan
y = [2, 1, –4, –1, 0]T.
x ·y = (–1)(2) + (4)(1) + (2)(–4) + (0)(–1) + (–3)(0) = –6
‖x‖ =
‖y‖ =
|x ·y| ≤ (‖x‖)(‖y‖) |–6| ≤ 6 ≤ (≈ 25.7) terbukti
3030241 22222
2201412 22222
2230 1652
1-19](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-19-2048.jpg)
![Contoh 1.8
Hitung sudut di antara dua vektor berikut ini: x = [6, –4]T dan y = [–2, 3]T.
θ ≈ cos–1(–0.9231) ≈ 157.39° atau 2.75 radian.
Definisi
Jika x dan y adalah vektor taknol dalam Rn (untuk n ≥ 2), maka sudut
di antara dua vektor tersebut adalah sudut unik yang besarnya di
antara 0 dan π radian; cosinus-nya adalah: (x ·y) / ((‖x‖)(‖y‖)).
9231.0
13
12
1352
24
3246
3426
yx
yx
cos
2222
1-20](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-20-2048.jpg)
![Teorema 1.8
Jika x = [x1, x2, …, xn]T dan y = [y1, y2, …, yn]T adalah vektor dalam Rn, θ adalah sudut
di antara x dan y; maka:
1) x ·y > 0 jika dan hanya jika 0 ≤ θ < π/2 radian (0° atau sudut lancip)
2) x ·y = 0 jika dan hanya jika θ = π/2 radian (sudut siku-siku 90°)
Kedua vektor tegak lurus (perpendicular/orthogonal)
3) x ·y < 0 jika dan hanya jika x = π/2 < θ < π radian (180° atau sudut tumpul)
Contoh 1.9
Verifikasi Teorema 1.8 untuk dua vektor berikut ini: x = [2, –5]T dan y = [–10, –4]T .
x ·y = (2)(–10) + (–5)(–4) = 0.
Dikarenakan x · y = 0, maka sudut di antara x dan y
adalah sudut siku-siku (kedua vektor saling tegak lurus)
terbukti
1-21](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-21-2048.jpg)
![Teorema 1.9
Jika x dan y adalah vektor taknol dalam Rn; maka x dan y akan paralel/sejajar jika
dan hanya jika x ·y = ± ‖x‖ ‖y‖;
yakni nilai cos θ = ±1, di mana θ adalah sudut di antara x dan y
Contoh 1.10
Buktikan bahwa dua vektor x = [8, –20, 4]T dan y = [6, –15, 3]T adalah paralel!
x ·y = (8)(6) + (–20)(–15) + (4)(3) = 360
‖x‖ = ‖y‖ =
‖x‖ ‖y‖ =
Karena x ·y = ‖x‖ ‖y‖, maka kedua vektor paralel terbukti
Perhatikan bahwa kedua vektor juga paralel sesuai dengan definisi karena:
[8, –20, 4]T = 4/3 [6, –15, 3]T
4804208 222
2703156 222
360129600270480
1-22](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-22-2048.jpg)
![Contoh 1.11
Cari proyeksi vektor b = [3, 1, –7]T pada vektor a = [4, 0, –3]T!
p = projab =
Definisi
Jika a dan b adalah vektor dalam Rn (a ≠ 0), maka proyeksi vektor b
pada vektor a adalah:
p = projab = a
a
ba
a
a
cosb 2
T
TT
25
99
0,,
25
132
30,,4
25
33
30,,4
304
731034
a
a
ba
222
2
1-23](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-23-2048.jpg)
![Teorema 1.10
Jika a adalah vektor taknol dalam Rn dan b adalah vektor dalam Rn; maka b dapat
didekomposisi sebagai jumlah dari dua komponen vektor: projab dan b – projab;
di mana yang pertama (apabila taknol) adalah paralel terhadap a dan yang kedua
adalah tegak lurus terhadap a.
Contoh 1.12
Dengan menggunakan vektor pada Contoh 1.11,
buktikan bahwa b – p adalah tegak lurus ter-
hadap a!
b – p = [3, 1, –7]T – [132/25, 0, –99/25]T = [–57/25, 1, –76/25]T
(b – p) ·a =
Karena hasil dot product (b – p) ·a = 0, maka kedua vektor tegak lurus terbukti
0
25
228
25
228
3
25
76
014
25
57
1-24](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-24-2048.jpg)
![Contoh 1.13
Suatu benda ditarik oleh sebuah gaya sebesar 8 N dengan arah [1, –2, 1]T. Benda
tersebut ternyata bergerak sepanjang 5 m ke arah [2, –1, 0] T. Hitung usaha yang
dilakukan!
Pertama kita harus me-normalisasi kedua vektor arah tersebut agar tidak mem-
pengaruhi besarnya vektor gaya dan jarak.
F = d =
Usaha yang dilakukan adalah:
W= F ·d
=
T
T
T
12,,1
6
8
12,,1
12,,18
T
T
T
0,1,2
5
5
0,1,2
0,1,25
J2.29
30
440
011221
30
40
0,1,2
5
5
12,,1
6
8
TT
1-25](https://image.slidesharecdn.com/alg2017vectorsandmatrices-170830140234/75/Linear-Algebra-Vectors-and-Matrices-25-2048.jpg)
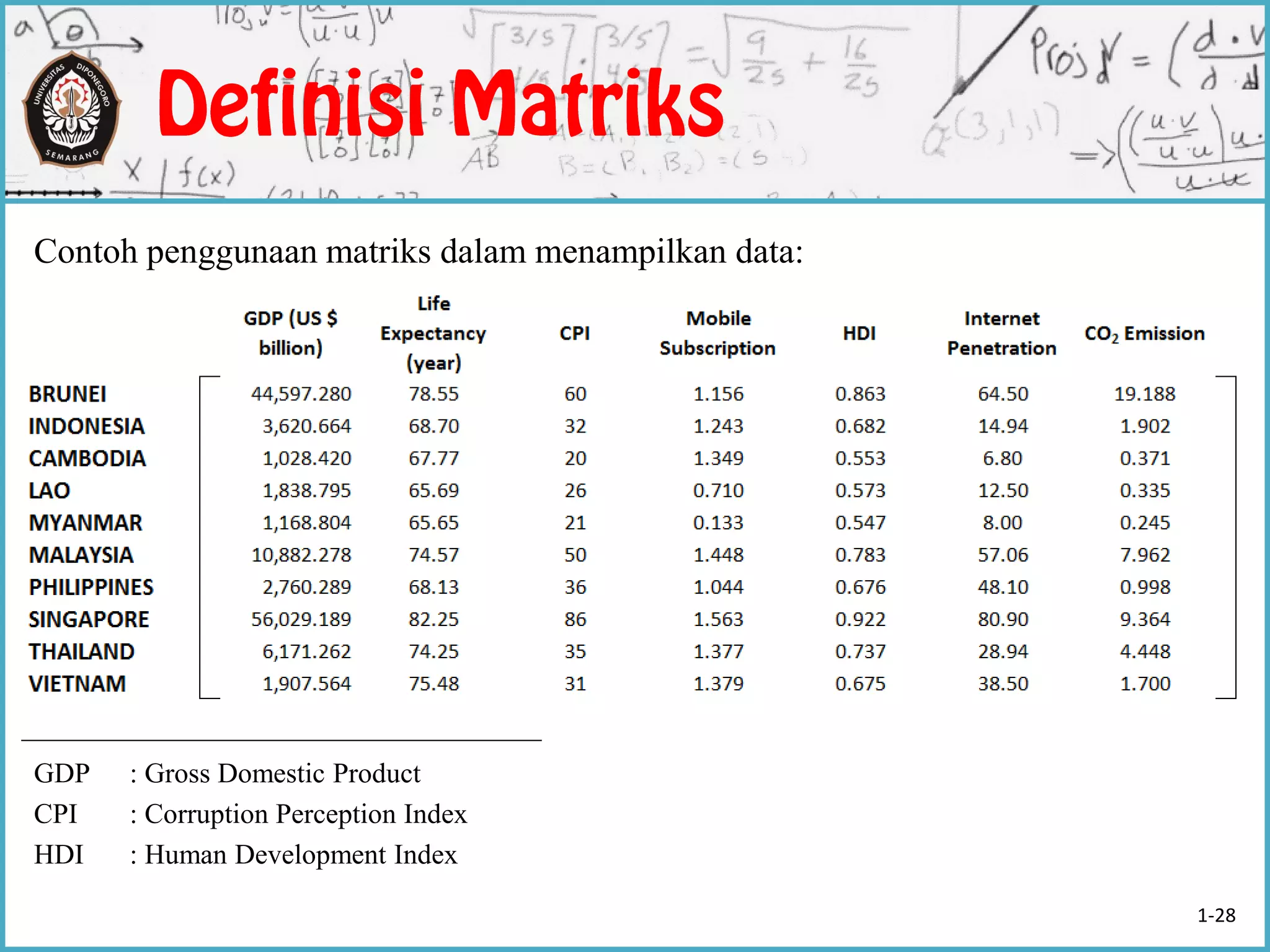

Dokumen tersebut membahas tentang: 1. Definisi vektor dan operasi-operasi dasar seperti penjumlahan dan perkalian skalar terhadap vektor 2. Konsep panjang vektor dan unit vektor 3. Representasi vektor sebagai pergerakan titik dalam sistem koordinat 4. Hukum-hukum dasar aljabar linear terkait vektor seperti hukum distribusi dan asosiativitas 5. Contoh-contoh penerapan konsep vektor dalam
























![Persamaan Diferensial [orde-2]](https://cdn.slidesharecdn.com/ss_thumbnails/persamaandiferensialorde-2-150706213036-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)