1. The document discusses Laplace transforms and their applications in solving differential equations that arise in mathematical models of chemical processes.
2. Laplace transforms allow the transformation of differential equations into algebraic equations, making them easier to solve. They can be used to solve linear ordinary differential equations (ODEs) that describe transient responses in unit operations.
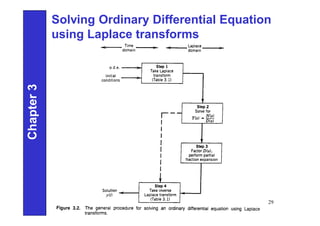
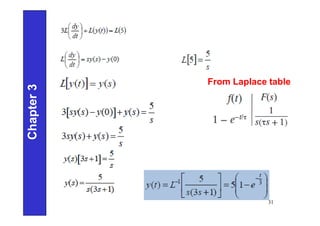
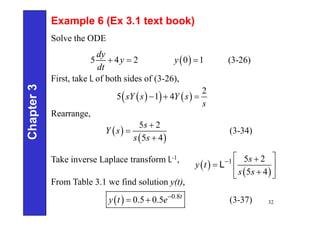
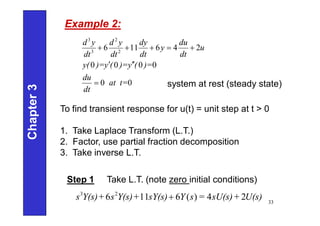
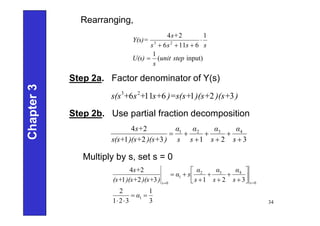
3. The key steps in using Laplace transforms to solve ODEs are: taking the Laplace transform of the differential equation to obtain an algebraic equation relating the transform of the dependent variable to the independent variable and boundary conditions; solving for the transform of the dependent variable; and taking the inverse Laplace transform to find the original dependent variable as a function of time.
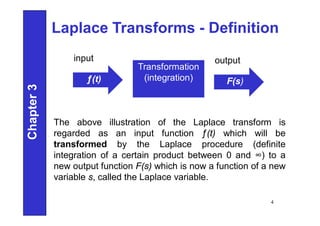
![Laplace Transforms – Definition
(cont..)
Where
F(s) - the symbol for the Laplace transform
s - complex independent variable
ƒ(t) - some function of time to be transformed
L - an operator defined by the integral
Chapter
3
5
The Laplace transform of a function ƒ(t) is defined as
[ ( )] = −
. ( )
∞
0
= ( ) with s > 0](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-6-320.jpg)
![Laplace Transforms
Chapter
3
6
Constant function
For ƒ(t) = a (a constant)
[ ] = −
∞
0
= − [ − ]|0
∞
= 0 − − =](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-7-320.jpg)
![Laplace Transforms (cont..)
Chapter
3
7
Application: Consider a step function given by
ƒ(t) = K . u(t)
where K is a constant, u(t) is a step function given by
Therefore
u(t) = 1 t > 0
u(t) = 0 t ≤ 0
[ . ( )] = . ( ) −
∞
0
= −
∞
0
Since u(t) = 1 over the range of integration
Resulting [ . ( )] = − −
=0
=∞
= − (0 − 1) =
Laplace transform of a step function of magnitude K is
.
1](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-8-320.jpg)
![Useful properties of Laplace
Transforms
Chapter
3
8
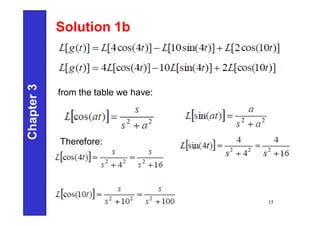
• Linear operation:
[ ( )] = ( )
[ ( ) + ( )] = ( ) + ( )
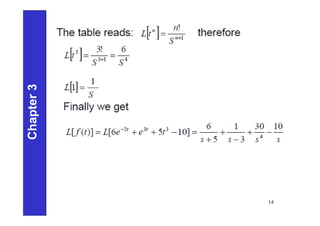
• Laplace transform for power function:
• Laplace transform for exponential function:
[ ] =
!
+1
[ ] =
1
−
[ − ] =
1
+](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-9-320.jpg)
![Chapter
3
9
Useful properties of Laplace
Transforms (cont..)
• Laplace transform of derivatives
• Laplace transform for integration
• Laplace transform of a time delay function
( )
= ( ) − [ −1 (0) + −2 ′(0) + ⋯ + −2(0) + −1
(0)]
Where initial derivatives up to (n-1) are required
( ) =
1
[ ( )] =
1
( )
[ ( − )] = −
( )](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-10-320.jpg)
![Chapter
3
16
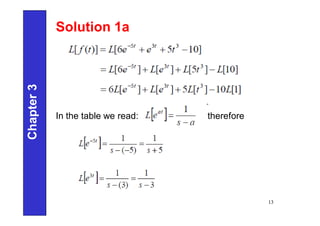
Solution 1c
[ℎ( )]](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-17-320.jpg)
![Chapter
3
17
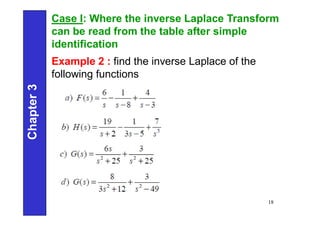
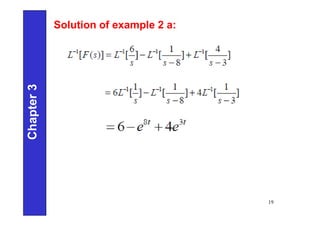
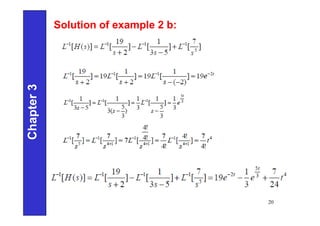
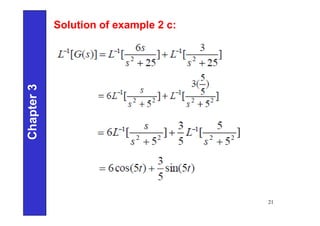
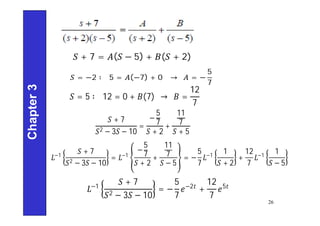
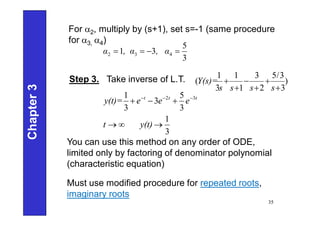
Inverse Laplace Transforms
• The inverse Laplace Transform transforms a function
from the Laplace domain into the time-domain.
−1[ ( )] = ( )
• For simple functions the inverse Laplace transform will
be directly read off a table by simple identification.
• Some functions will require to be rearranged into simple
functions in order to get their inverse from the table
• The inverse Laplace function is denoted as](https://image.slidesharecdn.com/unit3-laplacetransforms-220818102704-d8b799eb/85/Unit-3-Laplace-Transforms-pdf-18-320.jpg)