Download as PDF, PPTX

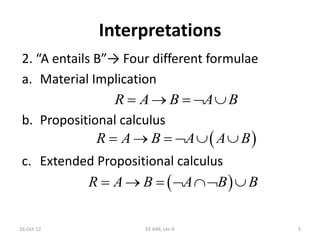
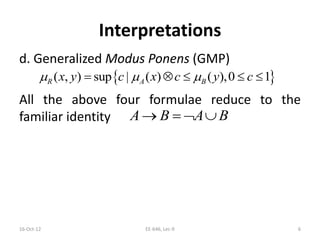
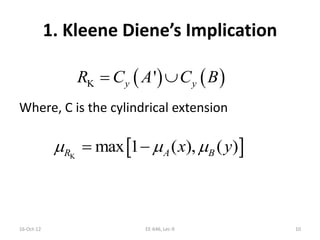
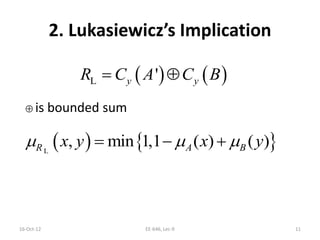
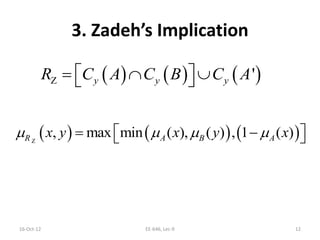
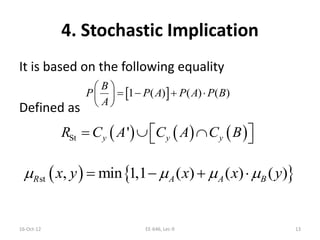
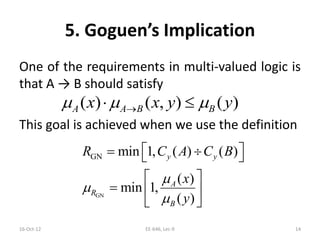
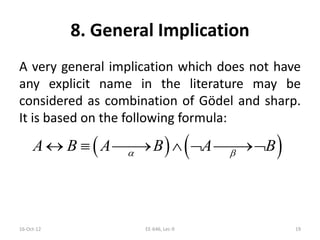
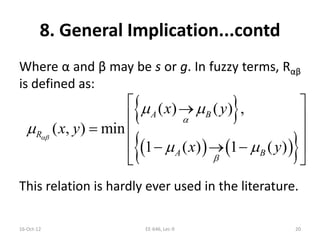
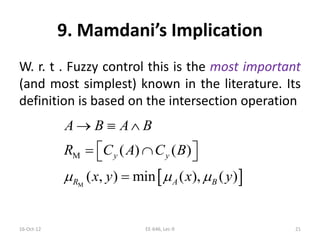

The document discusses fuzzy implications, also known as fuzzy rules or fuzzy conditionals, which are essential for fuzzy control systems and describe the relationship between two linguistic values. It outlines various interpretations of fuzzy implications, different types of fuzzy relations, and essential operators used in their formulation. Key implications such as Kleene-Dienes, Lukasiewicz, Zadeh's, and Mamdani's are introduced, along with their mathematical definitions and significance in fuzzy logic.