

![Example (1) : Vacuum Cleaner world state space
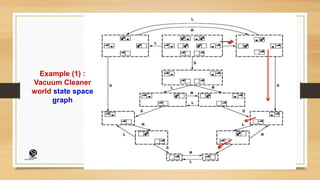
Observable, start in #5.
Solution? [Right , Suck]
Observable, start in #2.
Solution? [Suck , Left , Suck]
Observable, start in #6.
Solution? [Suck , Left]
Observable, start in #1.
Solution? [Suck , Right , Suck]
Unobservable, start in {1,2,3,4,5,6,7,8}
Solution? [Right , Suck , Left , Suck]
(CentreforKnowledgeTransfer)
institute](https://image.slidesharecdn.com/2-210731075225/85/Artificial-Intelligence-Searching-Techniques-19-320.jpg)

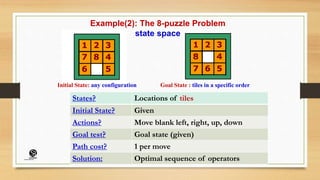
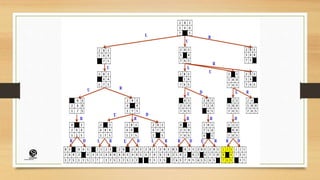
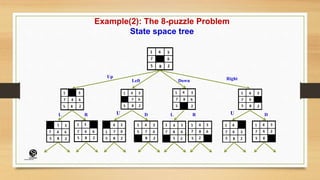
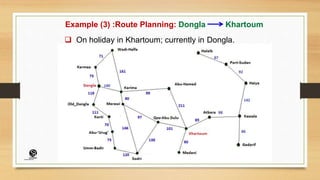
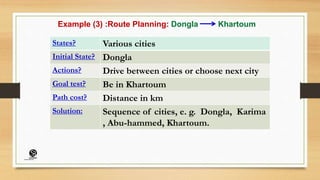
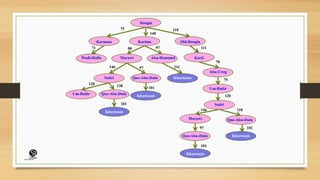
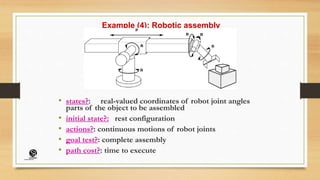
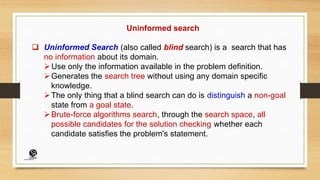



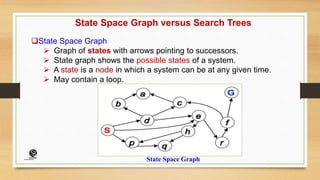
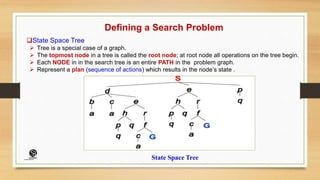
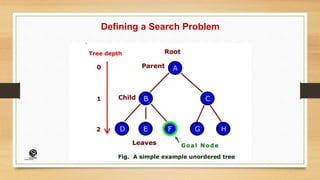
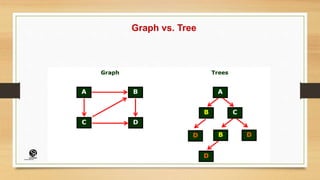
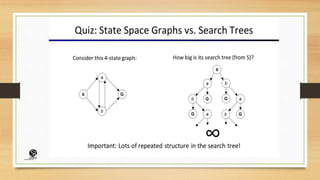
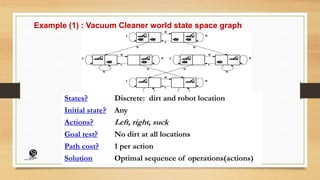
The document discusses various search techniques in artificial intelligence, including problem formulation, state space graphs, and search strategies such as uninformed (depth-first and breadth-first search) and informed searches (heuristic methods). It elaborates on the importance of defining search problems, representing problem states, and provides examples such as puzzle-solving and route planning. Executing algorithms in Prolog to implement these strategies is also emphasized, showcasing practical applications of searching in AI.