Download as PDF, PPTX

![9 of 57
speed [m/s]
Human
knowledge-based
Rule-based
Fuzzy
IF AND
THEN
distance
speed
acceleration
small
speed is declining
maintain
IF distance perfect AND
speed is declining
THEN increase acceleration](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-9-2048.jpg)


![16 of 57
Autonomous driving car
distance
speed
acceleration
13 m
-2.5 m/s
?
Knowledge
Rule base
Distance to next car [ m ]
v.small small perfect big v.big
Speed
Change
[ 𝒎 𝟐
]
declining -ve small zero +ve small +ve big +ve big
constant -ve big -ve small zero +ve small +ve big
growing -ve big -ve big -ve small zero +ve small
speed [m/s]](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-16-2048.jpg)
![17 of 57
speed [m/s]
Knowledge
Rule base
Distance to next car [ m ]
v.small small perfect big v.big
Speed
Change
[ 𝒎 𝟐
]
declining -ve small zero +ve small +ve big +ve big
constant -ve big -ve small zero +ve small +ve big
growing -ve big -ve big -ve small zero +ve small
0.4 0.25
0.4
0.6
0.6
0.75
0.75
0.25
0.25
0.4
0.25
0.6
Rule 1: IF distance is small AND speed is declining
THEN acceleration zero
Rule 2: IF distance is small AND speed is constant
THEN acceleration negative small
Rule 3: IF distance is perfect AND speed is declining
THEN acceleration positive small
Rule 4: IF distance is perfect AND speed is constant
THEN acceleration zero
max
Take
min](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-17-2048.jpg)


![20 of 57
Washing Machine
40
30
?0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50 60 70 80 90 100
𝞵(weight)
Weight (g)
v.Light light Heavy V.heavy
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50 60 70 80 90 100
μ(Dirtiness)
Dirtiness (%)
Almost Clean Dirty Soiled Filthy
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50 60 70 80 90 100
μ(detergent)
Detergent (%)
v.Light little Much V.Much Maximum
Knowledge
Rule base
Weight [ Kg ]
V.Light Light Heavy V.Heavy
Dirtiness
Almost
Clean
V.Little Little Much Much
Dirty Little Little Much V.Much
Soiled Much Much V.Much Maximum
Filthy V.Much Much V.Much Maximum
weight
dirtiness
amount of
detergent output](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-20-2048.jpg)






![41 of 57
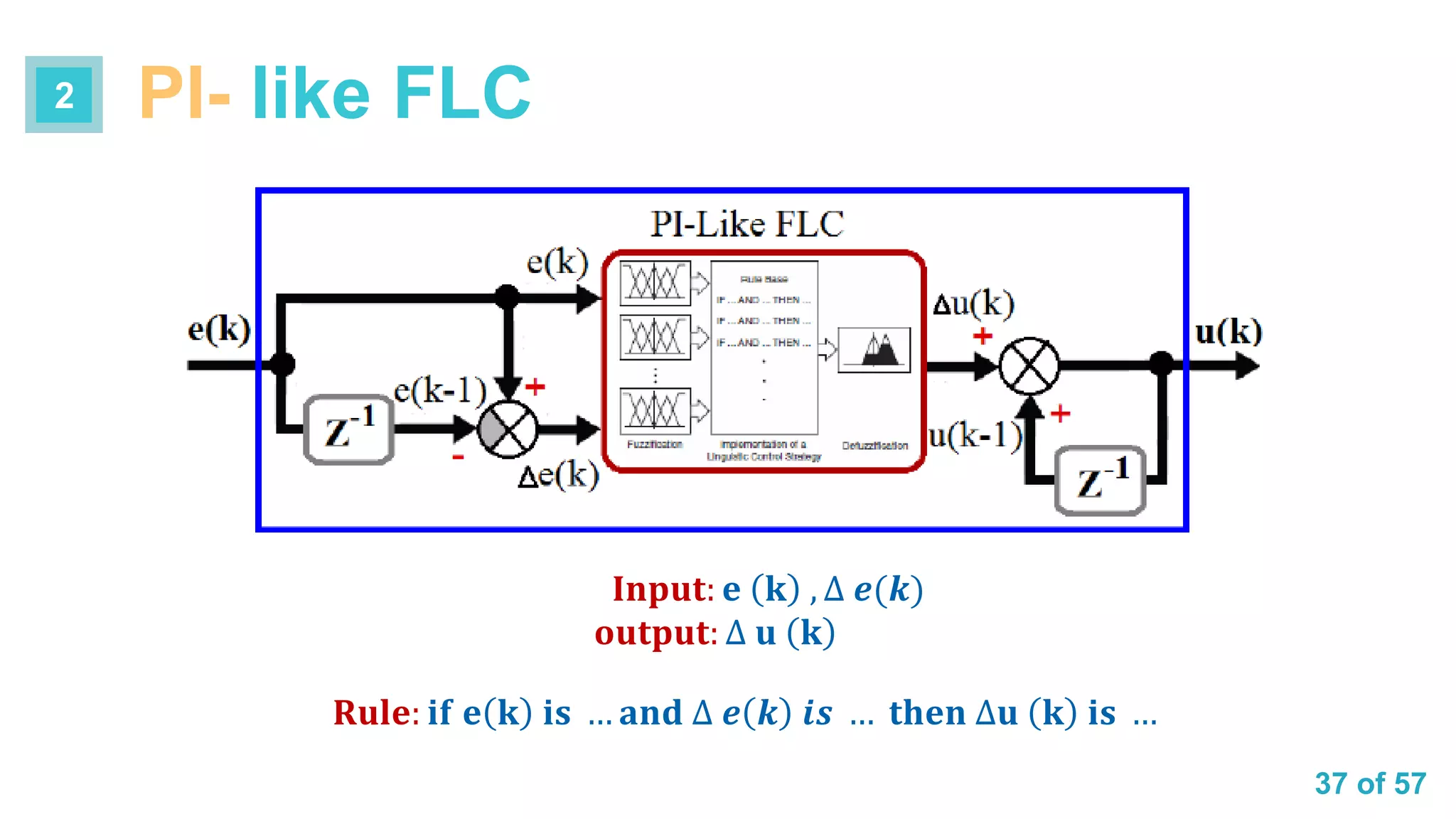
Consider a system model is describe by:
𝒚 (𝒌) = 𝟎. 𝟔 × 𝒚 (𝒌 − 𝟏) + 𝒖(𝒌 − 𝟏)
PI-Like FLC is designed to regulate this system around a set point of R=2. Five fuzzy sets are used
to represent the linguistic variables NB, NS, Z, PS and PB for the controller both input and output
variables. Triangular membership functions are used to represent these fuzzy sets and defined on the
normalized domain [-1,1] as shown in Fig. 1. The suggested rule-base is depicted in table. If the
measured parameters are obtained as y(k-1)=1.5 and u(k-1)=0.5,find the controller output signal
taking into account the actual domain of the controller variables is [-2, 2].
Knowledge
Rule base
e(k)
NB NS Z PS PB
∆ 𝒆(𝒌)
NB NB NB NB NS Z
NS NB NB NS Z PS
Z NB NS Z PS PB
PS NS Z PS PB PB
PB Z PS PB PB PB](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-41-2048.jpg)
![42 of 5742 of 24
𝒚 (𝒌) = 𝟎. 𝟔 × 𝒚 (𝒌 − 𝟏) + 𝒖(𝒌 − 𝟏)
𝒂𝒄𝒕𝒖𝒂𝒍 𝒅𝒐𝒎𝒂𝒊𝒏 ∈ −𝟐, 𝟐
𝒕𝒉𝒆 𝒄𝒐𝒏𝒕𝒓𝒐𝒍𝒍𝒆𝒓 𝒐𝒖𝒕𝒑𝒖𝒕 𝒔𝒊𝒈𝒏𝒂𝒍
find
𝒏𝒐𝒓𝒎𝒂𝒍𝒊𝒛𝒆𝒅 𝒅𝒐𝒎𝒂𝒊𝒏 ∈ [−𝟏, 𝟏]
𝑷𝑰 − 𝑳𝒊𝒌𝒆 𝑭𝑳𝑪
𝒚 𝒌 = 𝟎. 𝟔 × 𝒚 𝒌 − 𝟏 + 𝒖 𝒌 − 𝟏
= 𝟎. 𝟔 × 𝟏. 𝟓 + 𝟎. 𝟓 = 𝟏. 𝟒
𝒆(𝒌) = 𝑹(𝒌) − 𝒚(𝒌)
= 𝟐 − 𝟏. 𝟒 = 𝟎. 𝟔
𝜟𝒆 (𝒌) = 𝒆 (𝒌) − 𝒆 (𝒌 − 𝟏)
= 𝑹 𝒌 − 𝒚 𝒌 − 𝑹 𝒌 − 𝒚 𝒌 − 𝟏
= 𝒚 𝒌 − 𝟏 − 𝒚 𝒌
= 𝟏. 𝟓 − 𝟏. 𝟒 = 𝟎. 𝟏
𝑻𝒉𝒆 𝒂𝒄𝒕𝒖𝒂𝒍 𝒔𝒚𝒔𝒕𝒆𝒎 𝒐𝒖𝒕𝒑𝒖𝒕 𝒇𝒐𝒓 𝒕𝒉𝒆 𝒎𝒆𝒂𝒔𝒖𝒓𝒆𝒅 𝒗𝒂𝒍𝒖𝒆𝒔:
𝒚 𝒌 − 𝟏 = 𝟏. 𝟓
𝒖 𝒌 − 𝟏 = 𝟎. 𝟓](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-42-2048.jpg)
![43 of 5743 of 24
𝒚 (𝒌) = 𝟎. 𝟔 × 𝒚 (𝒌 − 𝟏) + 𝒖(𝒌 − 𝟏)
𝒚 𝒌 = 𝟏. 𝟒
𝒂𝒄𝒕𝒖𝒂𝒍 𝒅𝒐𝒎𝒂𝒊𝒏 ∈ −𝟐, 𝟐
𝒕𝒉𝒆 𝒄𝒐𝒏𝒕𝒓𝒐𝒍𝒍𝒆𝒓 𝒐𝒖𝒕𝒑𝒖𝒕 𝒔𝒊𝒈𝒏𝒂𝒍
find
𝒆 𝒌 = 𝟎. 𝟔
𝒏𝒐𝒓𝒎𝒂𝒍𝒊𝒛𝒆𝒅 𝒅𝒐𝒎𝒂𝒊𝒏 ∈ [−𝟏, 𝟏]
𝑷𝑰 − 𝑳𝒊𝒌𝒆 𝑭𝑳𝑪
∆𝒆 𝒌 = 𝟎. 𝟏
𝑻𝒉𝒆 𝒏𝒐𝒓𝒎𝒂𝒍𝒊𝒛𝒆𝒅 𝒊𝒏𝒑𝒖𝒕 𝒗𝒂𝒍𝒖𝒆𝒔 𝒇𝒐𝒓 𝑭𝑳𝑪 𝒘𝒊𝒍𝒍 𝒃𝒆:
𝑮 𝒆 =
𝟏
𝟐
= 𝟎. 𝟓 , 𝑮∆𝒆 =
𝟏
𝟐
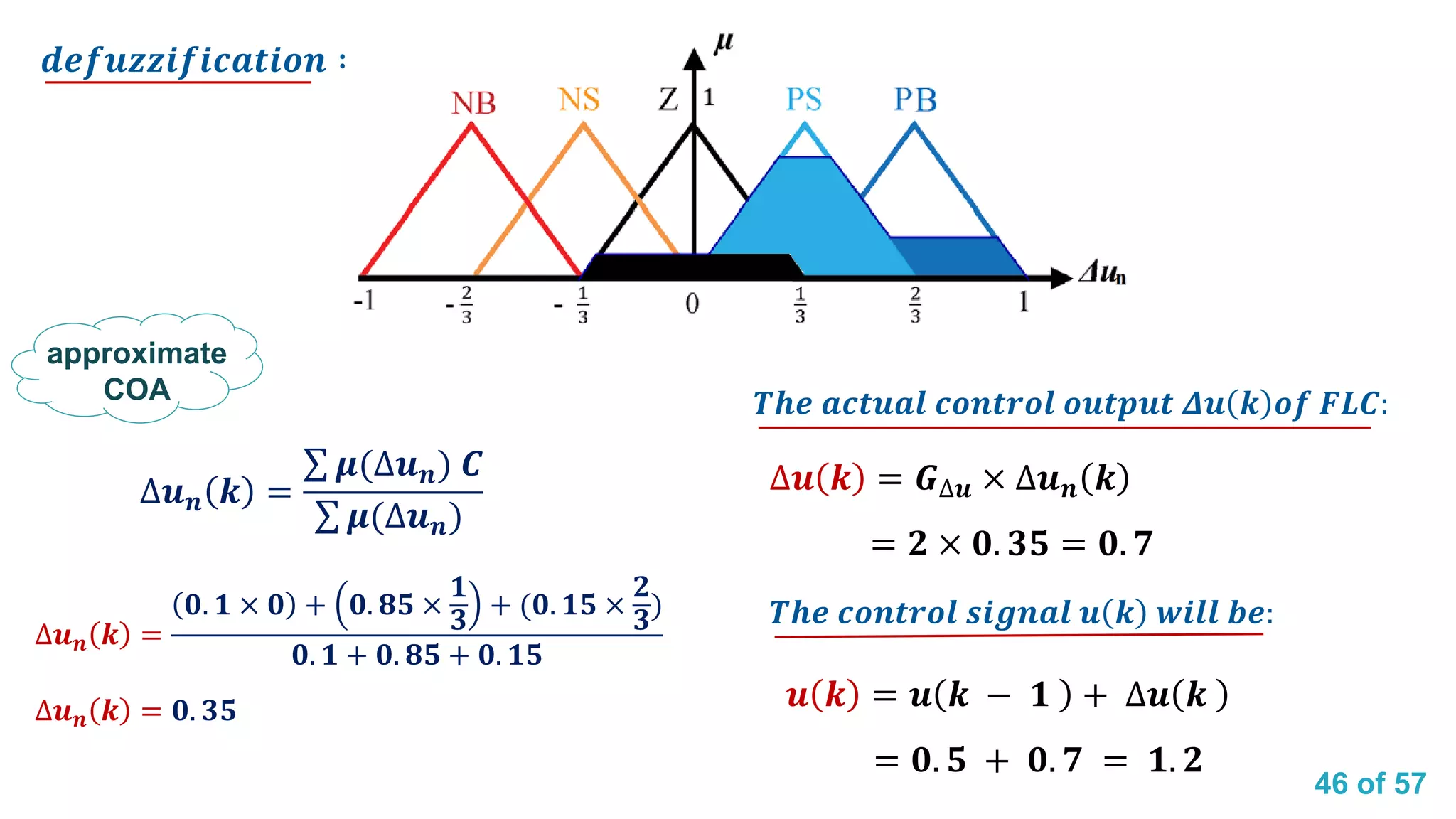
= 𝟎. 𝟓 , 𝑮∆𝒖 =
𝟐
𝟏
= 𝟐
𝑻𝒐 𝒐𝒃𝒕𝒂𝒊𝒏 𝒔𝒄𝒂𝒍𝒊𝒏𝒈 𝒇𝒂𝒄𝒕𝒐𝒓𝒔:
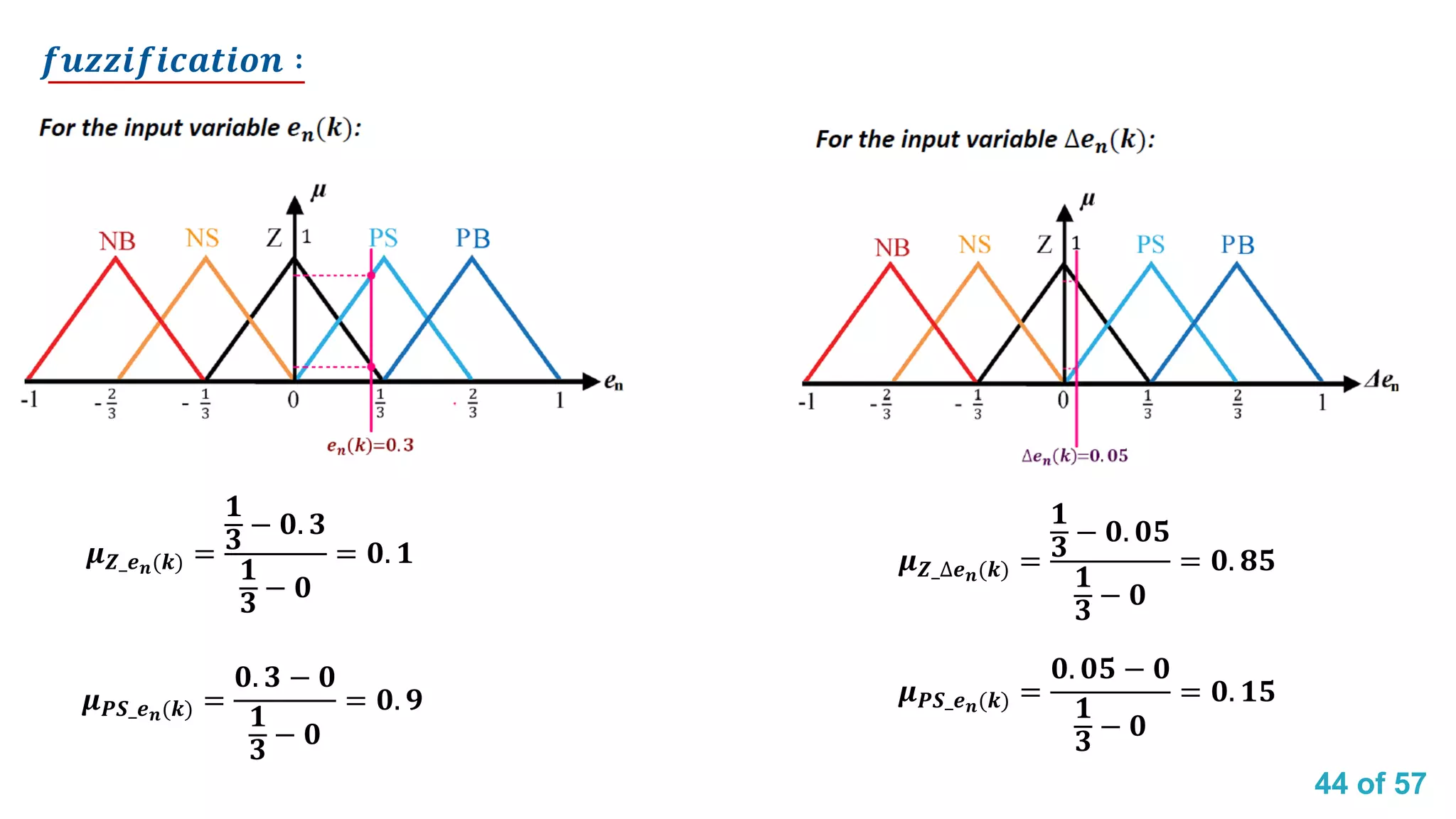
𝒆 𝒏 𝒌 = 𝑮 𝒆 × 𝒆 𝒌
= 𝟎. 𝟓 × 𝟎. 𝟔 = 𝟎. 𝟑
∆𝒆 𝒏(𝒌) = 𝑮∆𝒆 × ∆𝒆 𝒌
= 𝟎. 𝟓 × 𝟎. 𝟏 = 𝟎. 𝟎𝟓](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-43-2048.jpg)






![55 of 57
References
[1] L.-X. Wang, A Course in Fuzzy Systems and Control. Prentice Hall PTR, 1997.
[2] S. N. Sivanandam, S. Sumathi, and S. N. Deepa, Introduction to Fuzzy Logic using MATLAB.
Springer, 2006.
[3] T. J. Ross, Fuzzy Logic with Engineering Applications, 2nd ed. Wiley, 2004.
[4] Essam Nabil, “Autonomous driving car,” March,2019, pp. 1–13.[presentation].
[5] Essam Nabil, “Fuzzy logic control system applications,” March,2019, pp. 1-30 .[presentation].
[6] Essam Nabil, “Tipping problem,” March,2019, pp. 1–18.[presentation].](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-55-2048.jpg)
![56 of 57
References
[7] “Build Fuzzy Systems Using Fuzzy Logic Designer - MATLAB & Simulink.” [Online]. Available:
https://www.mathworks.com/help/fuzzy/building-systems-with-fuzzy-logic-toolbox-
software.html. [Accessed: 22-Nov-2019].
[8] “Build Fuzzy Systems at the Command Line - MATLAB & Simulink.” [Online]. Available:
https://www.mathworks.com/help/fuzzy/working-from-the-command-line.html.
[Accessed: 22-Nov-2019]
[9] Essam Nabil, “Tank control system” March,2019, pp. 1–18.[presentation].
[10] Essam Nabil, “PID - Like Fuzzy Logic control” March,2019, pp. 1–39.[presentation].](https://image.slidesharecdn.com/fuzzylogic-200413214019/75/Fuzzy-logic-56-2048.jpg)


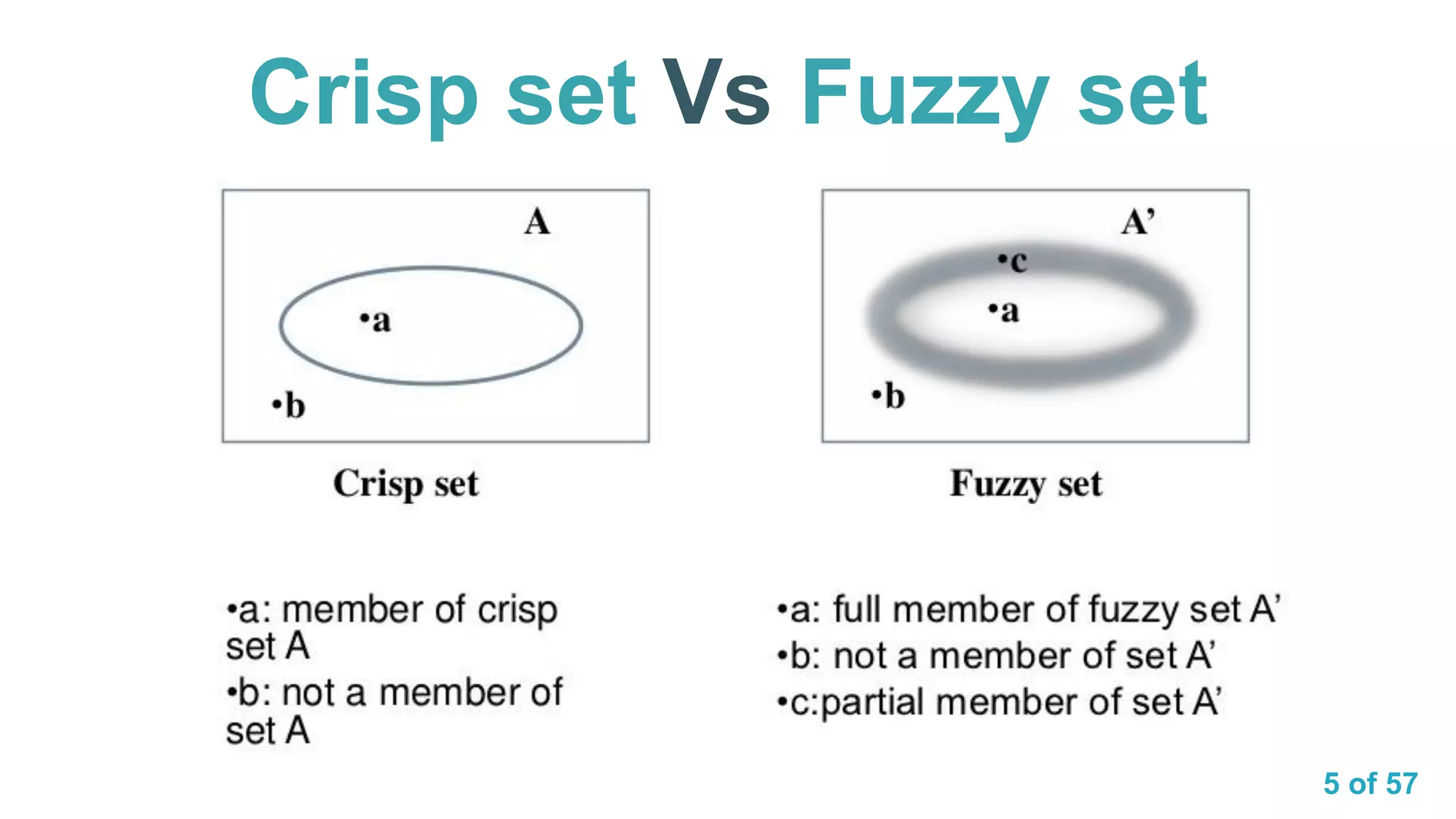
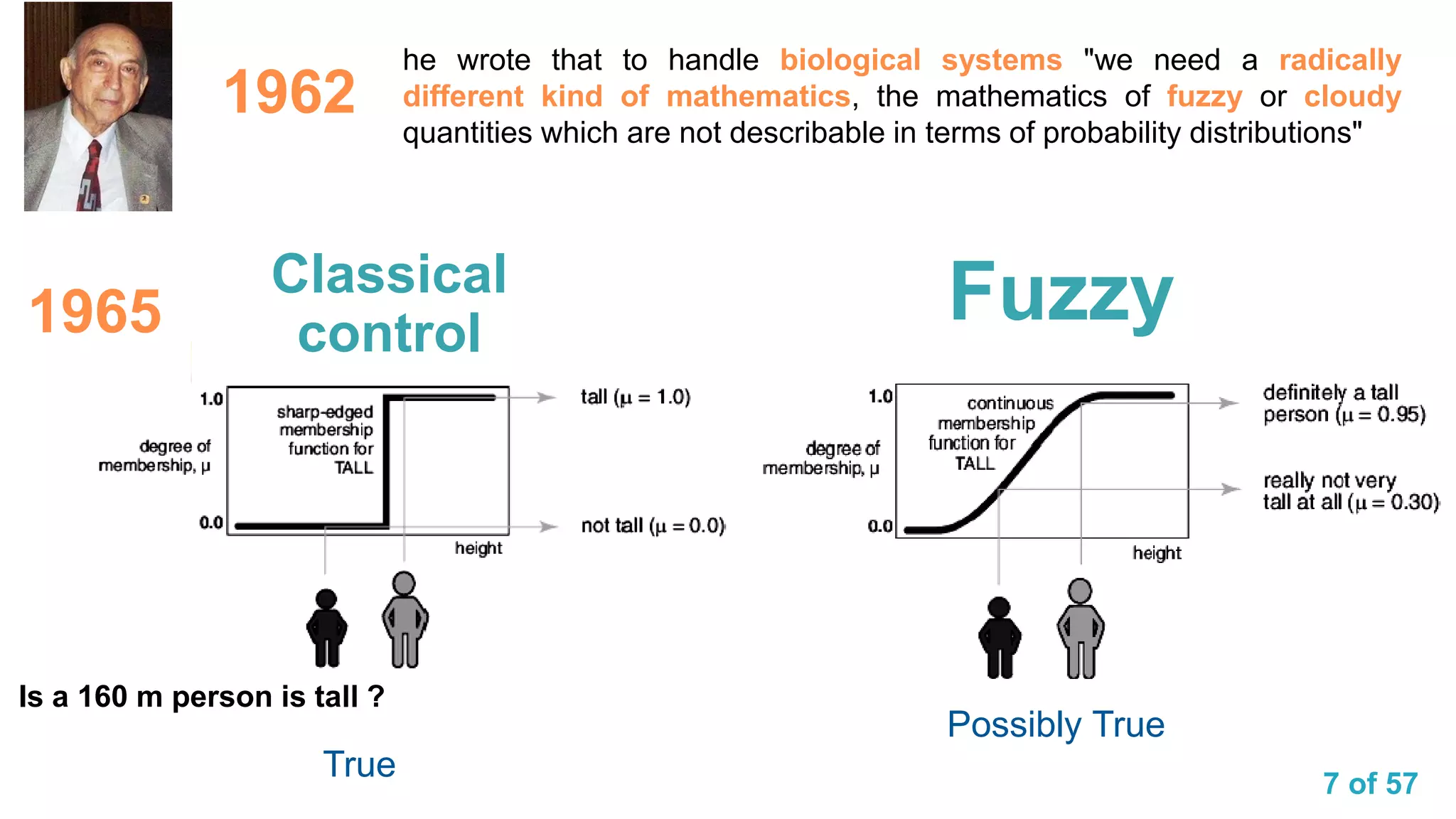
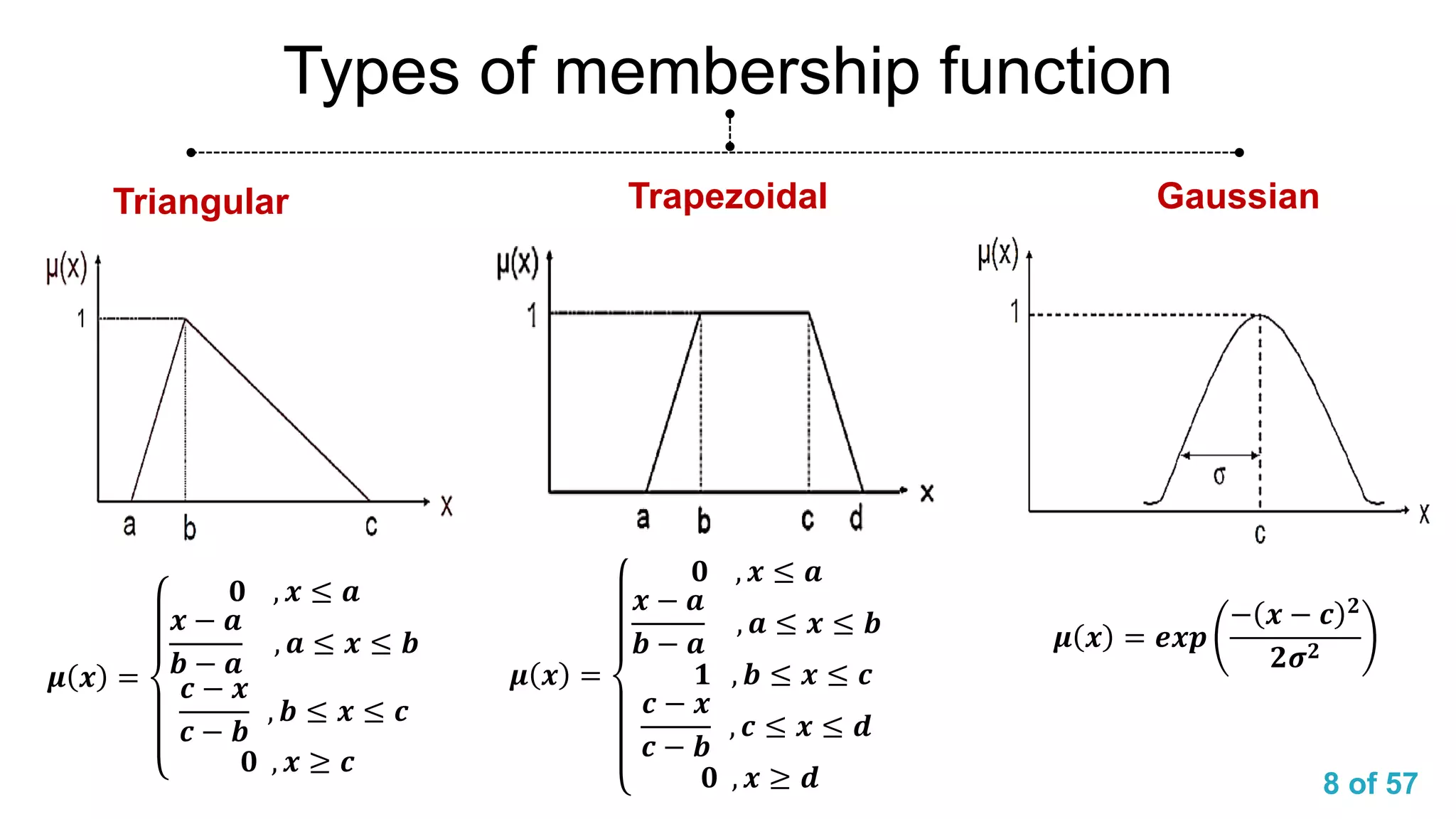
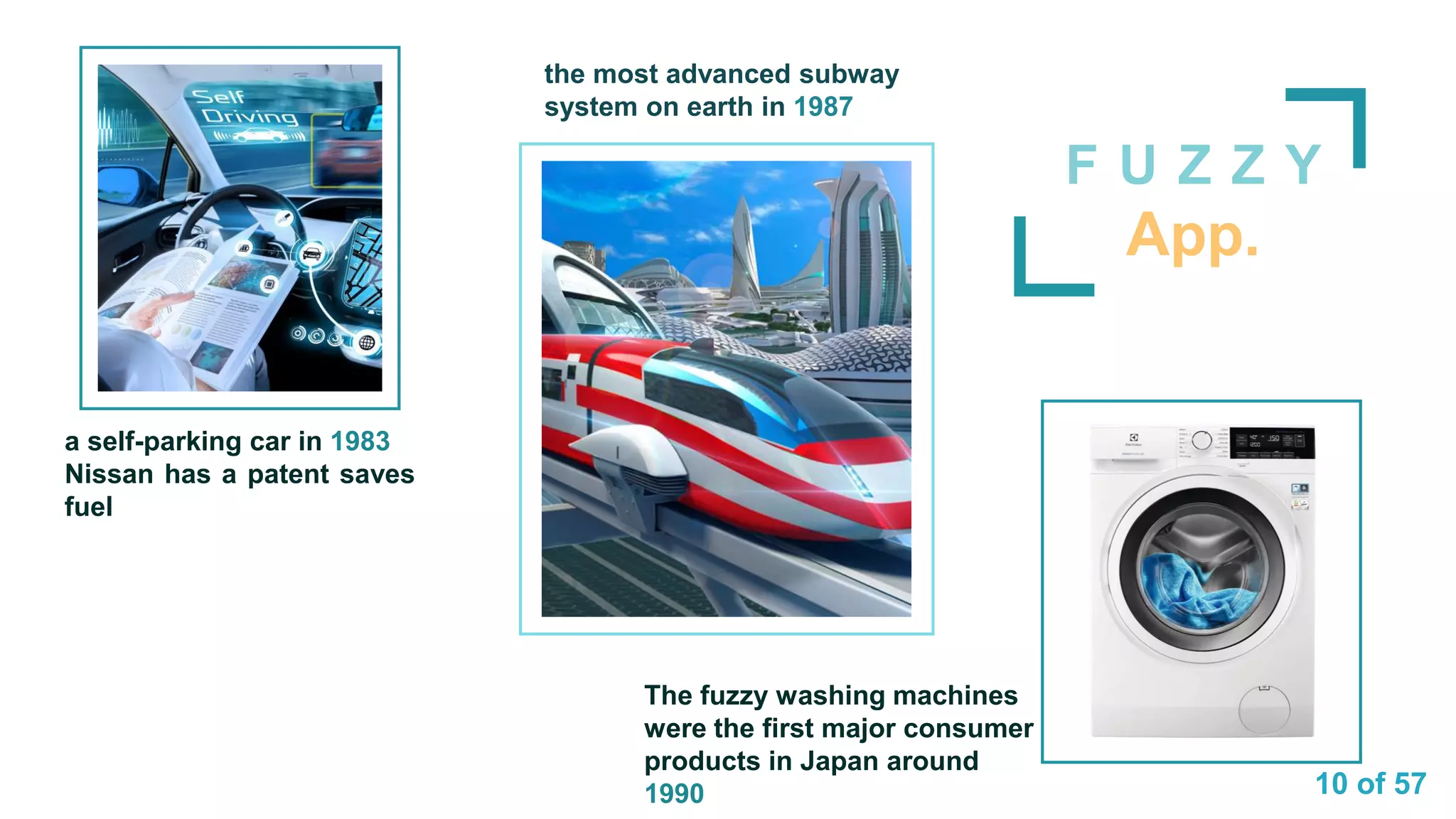
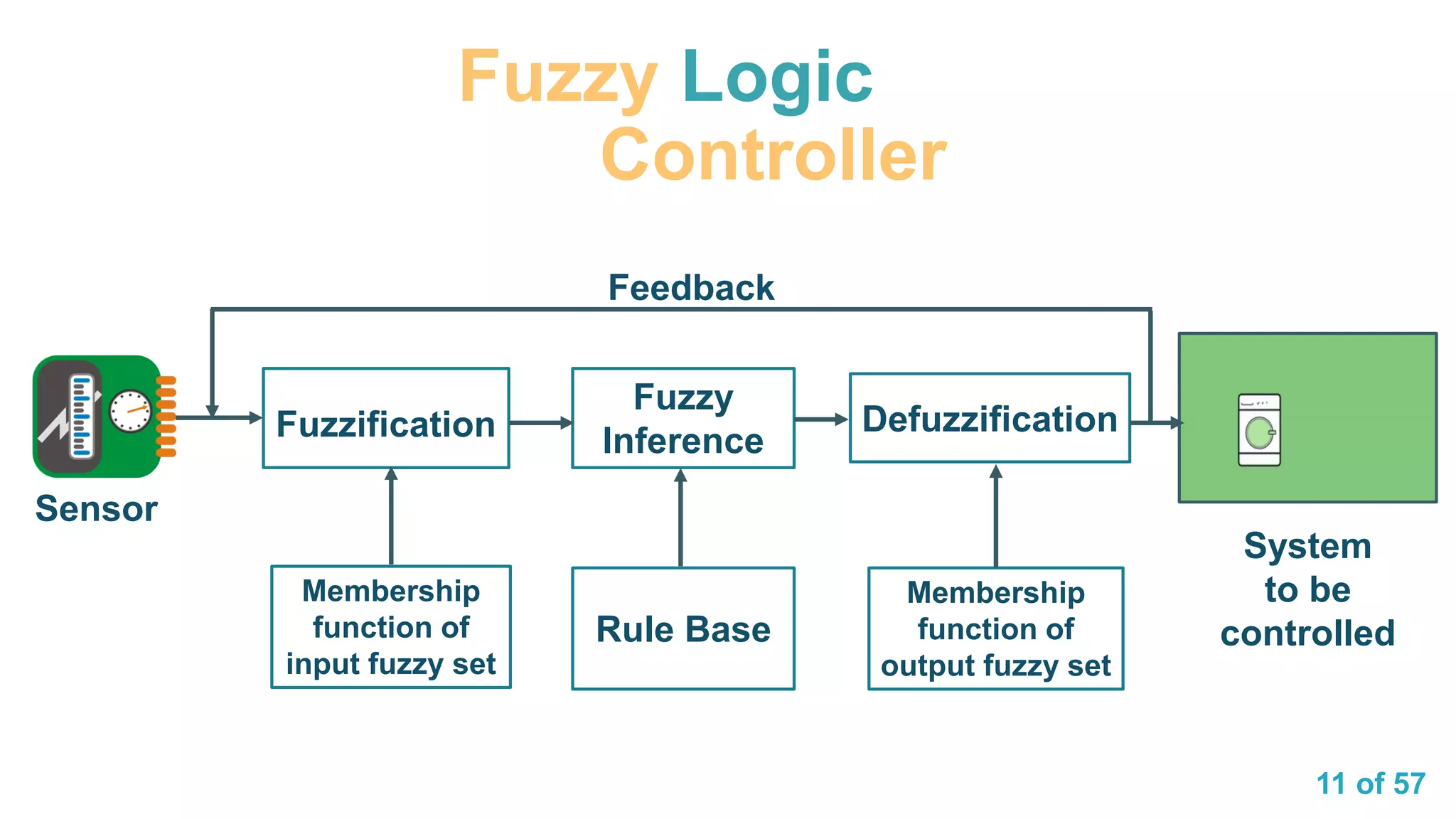
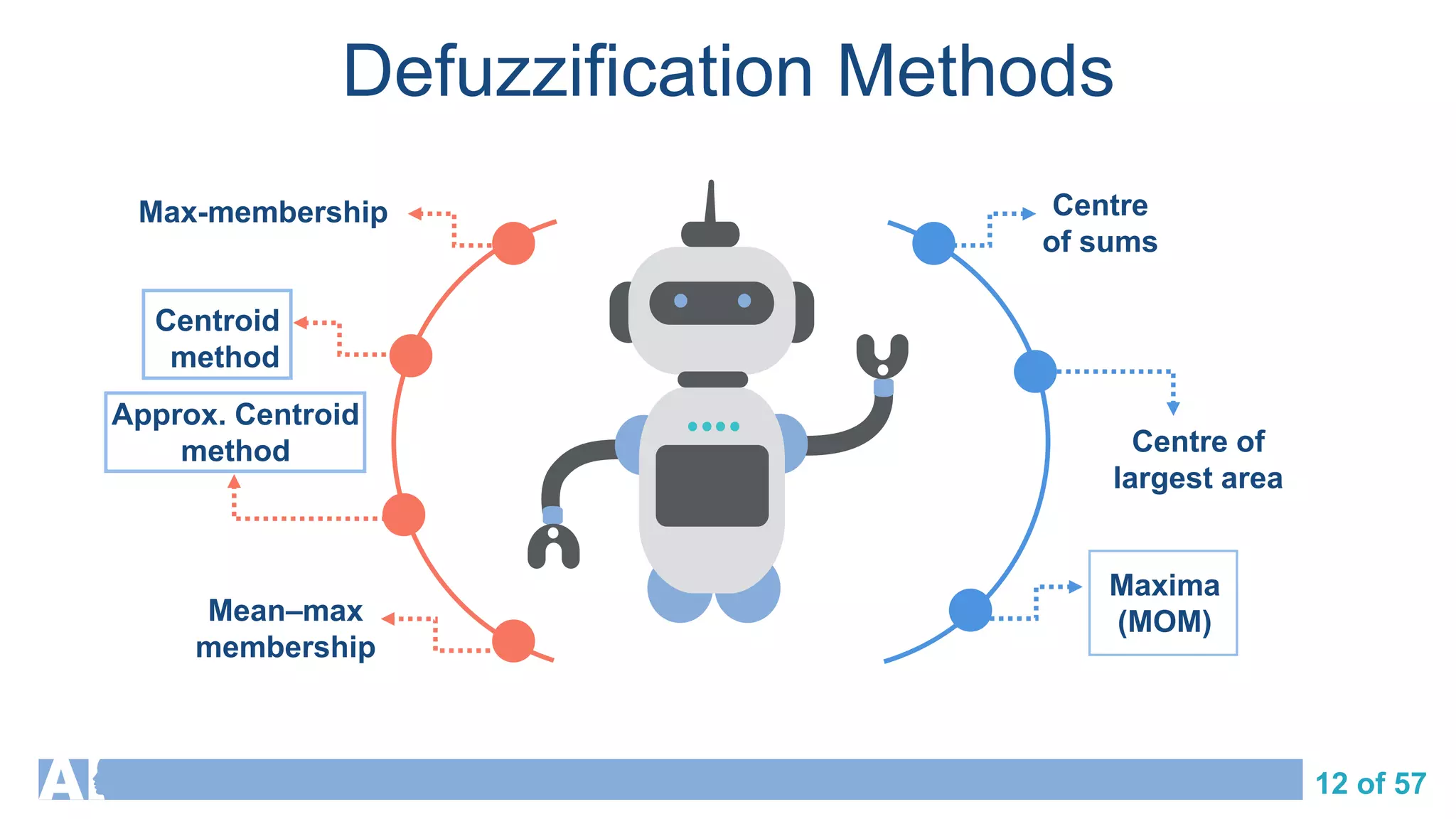
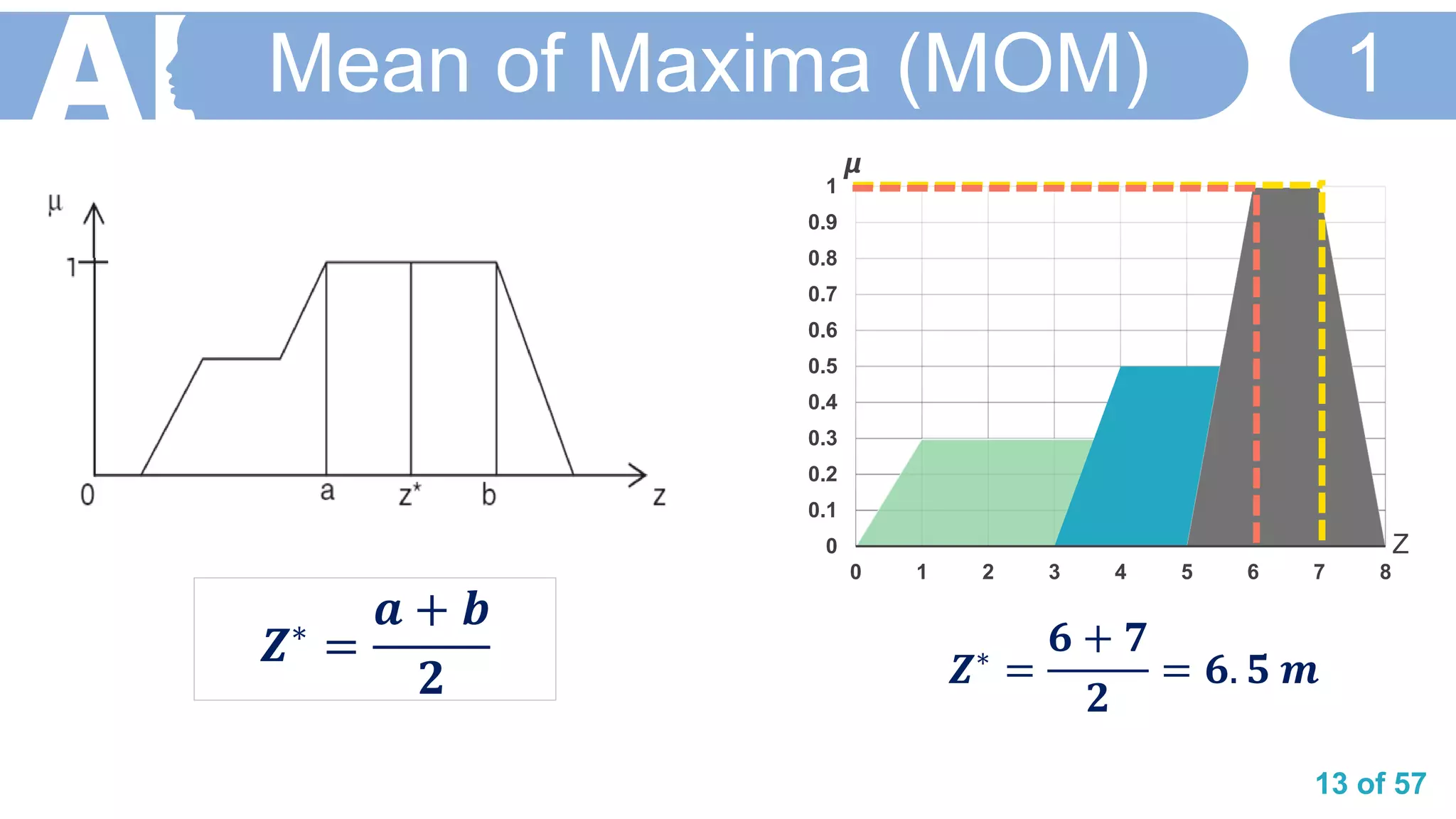
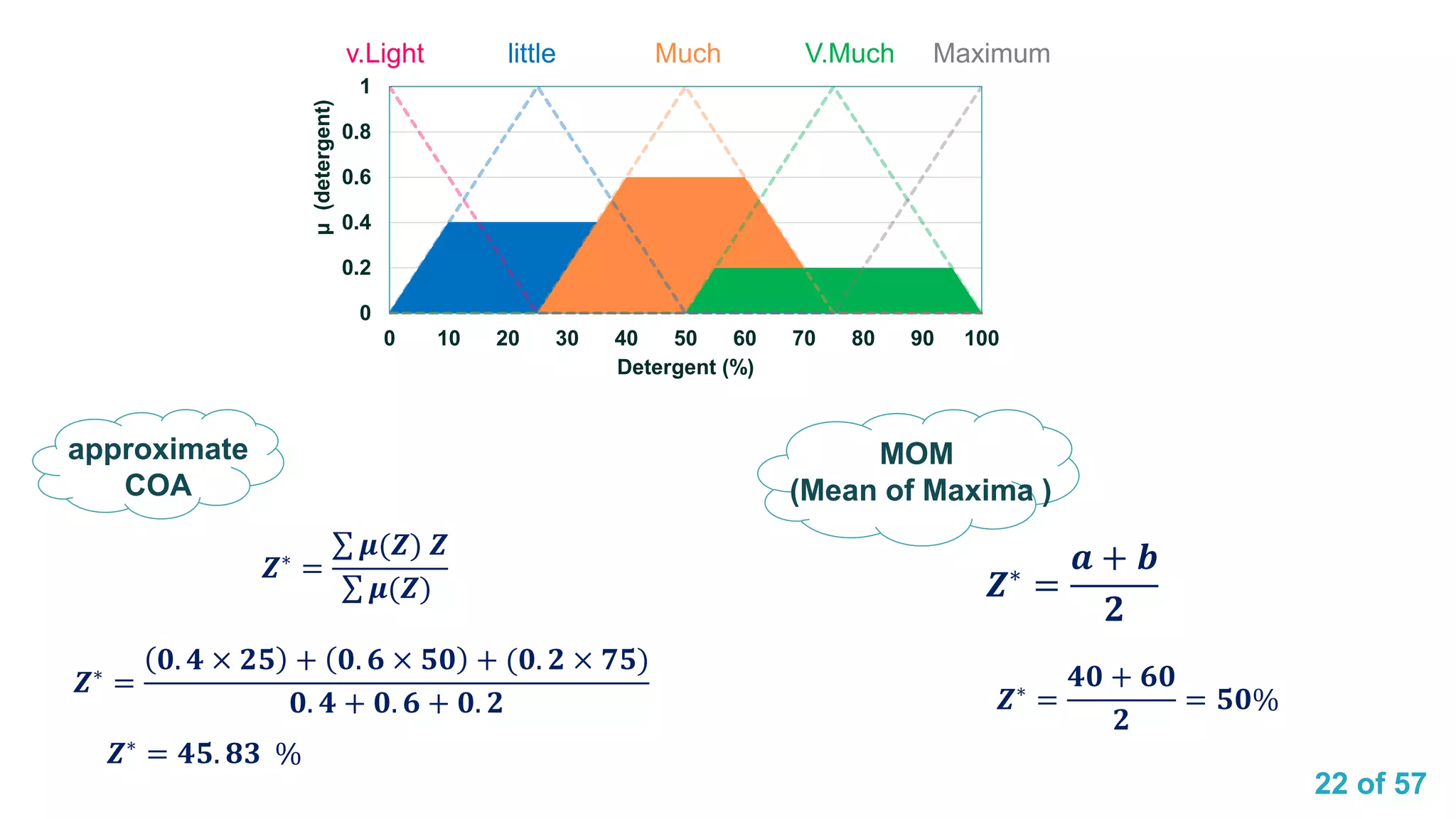
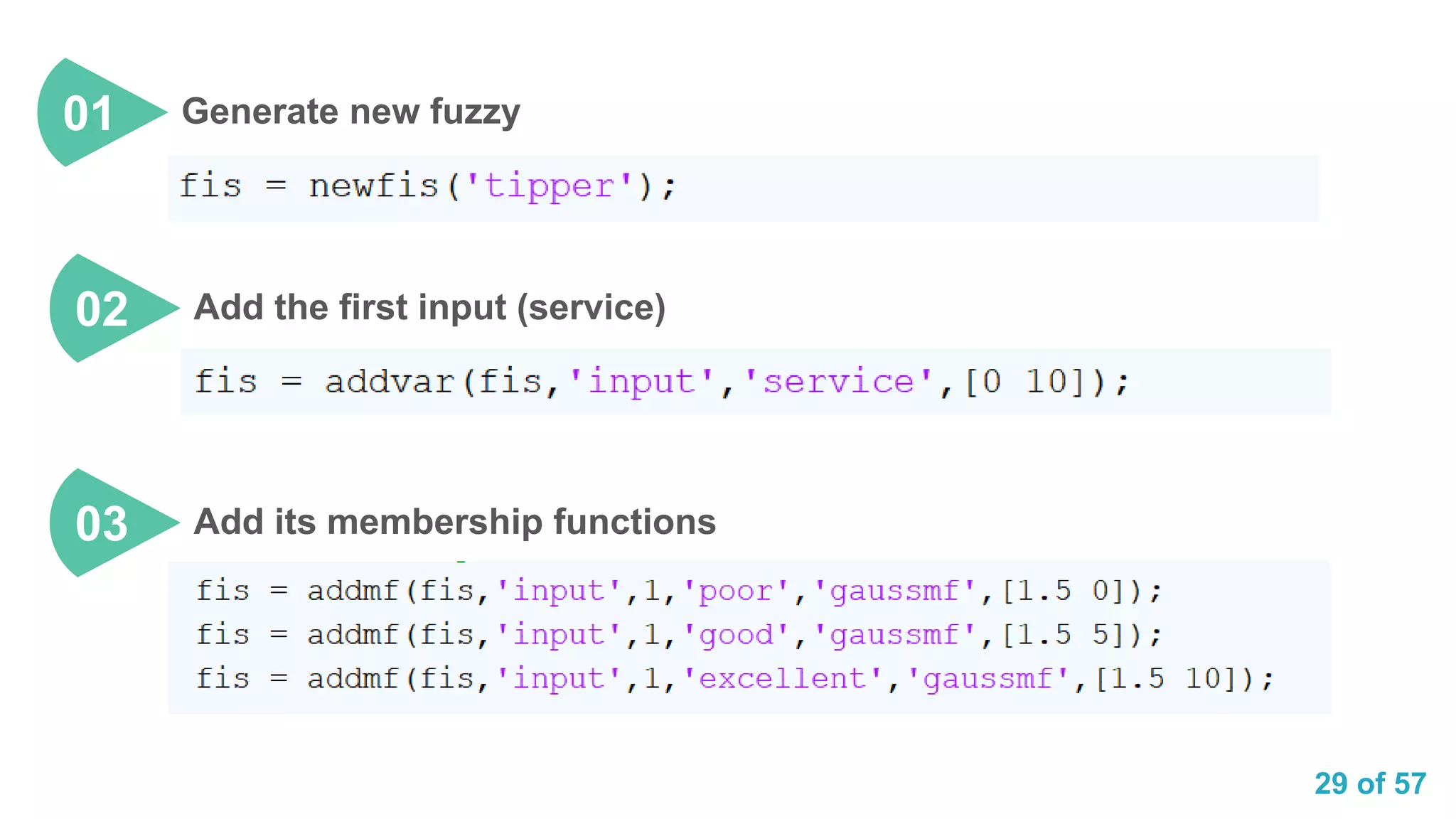
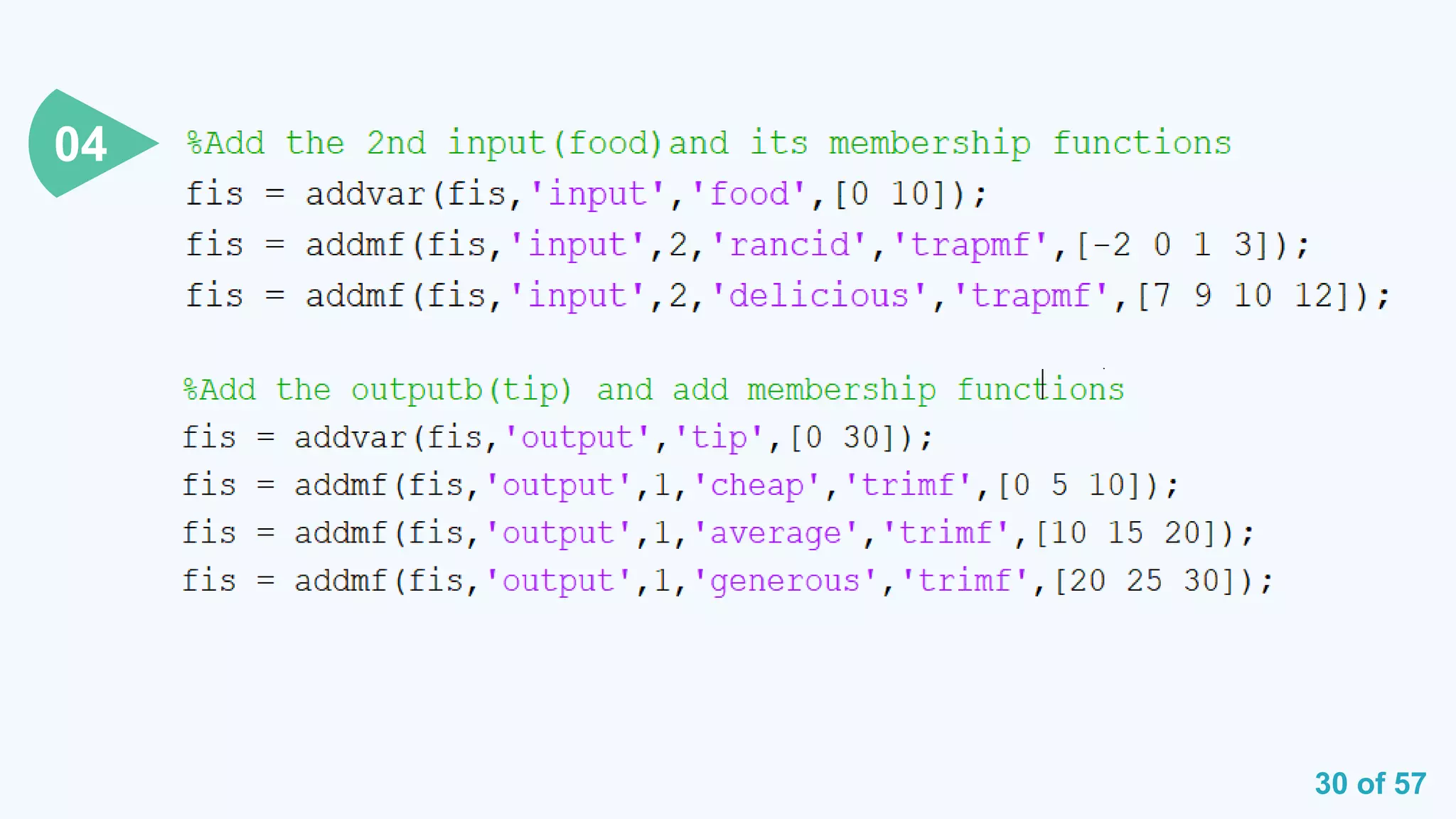
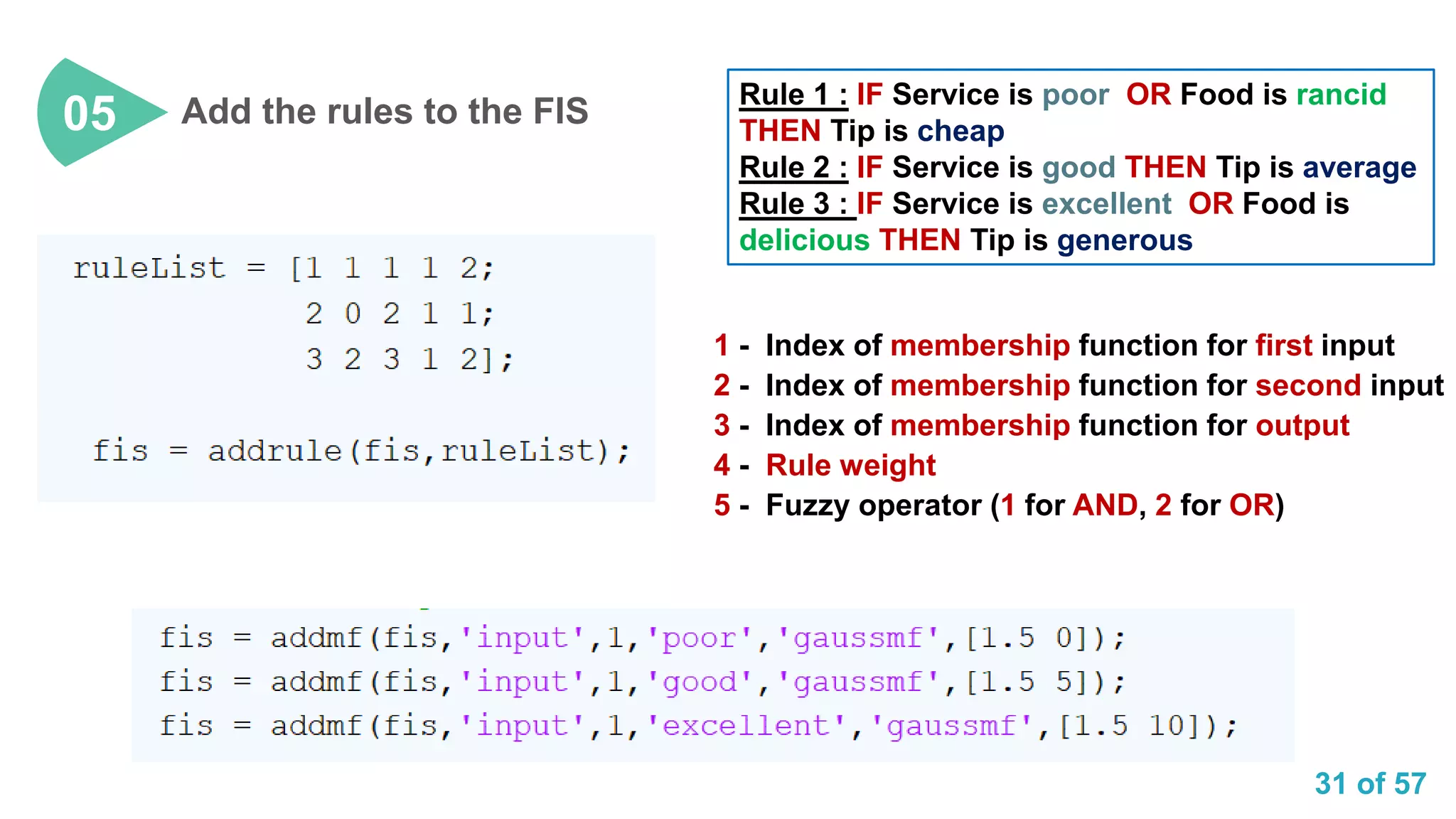
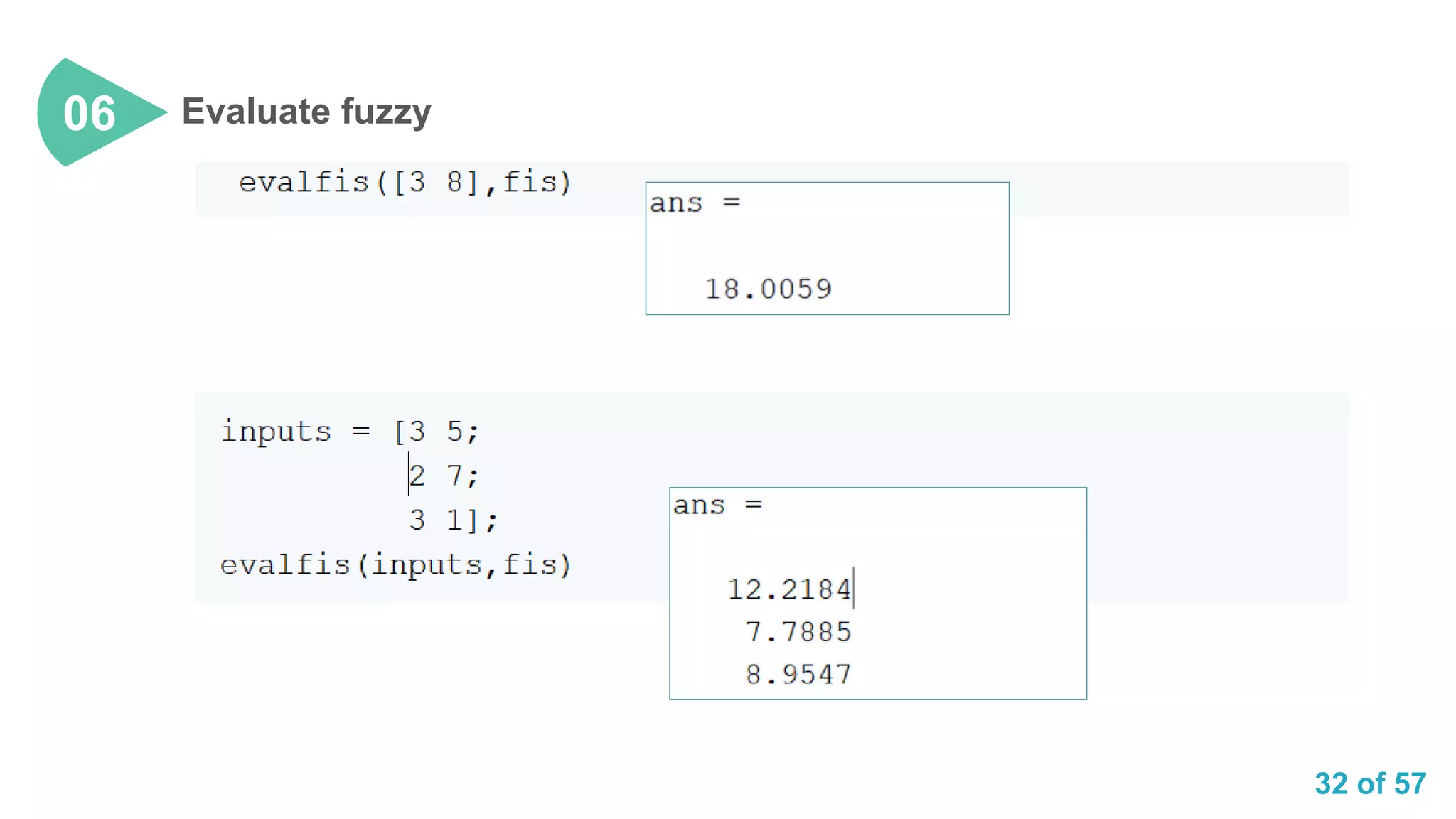
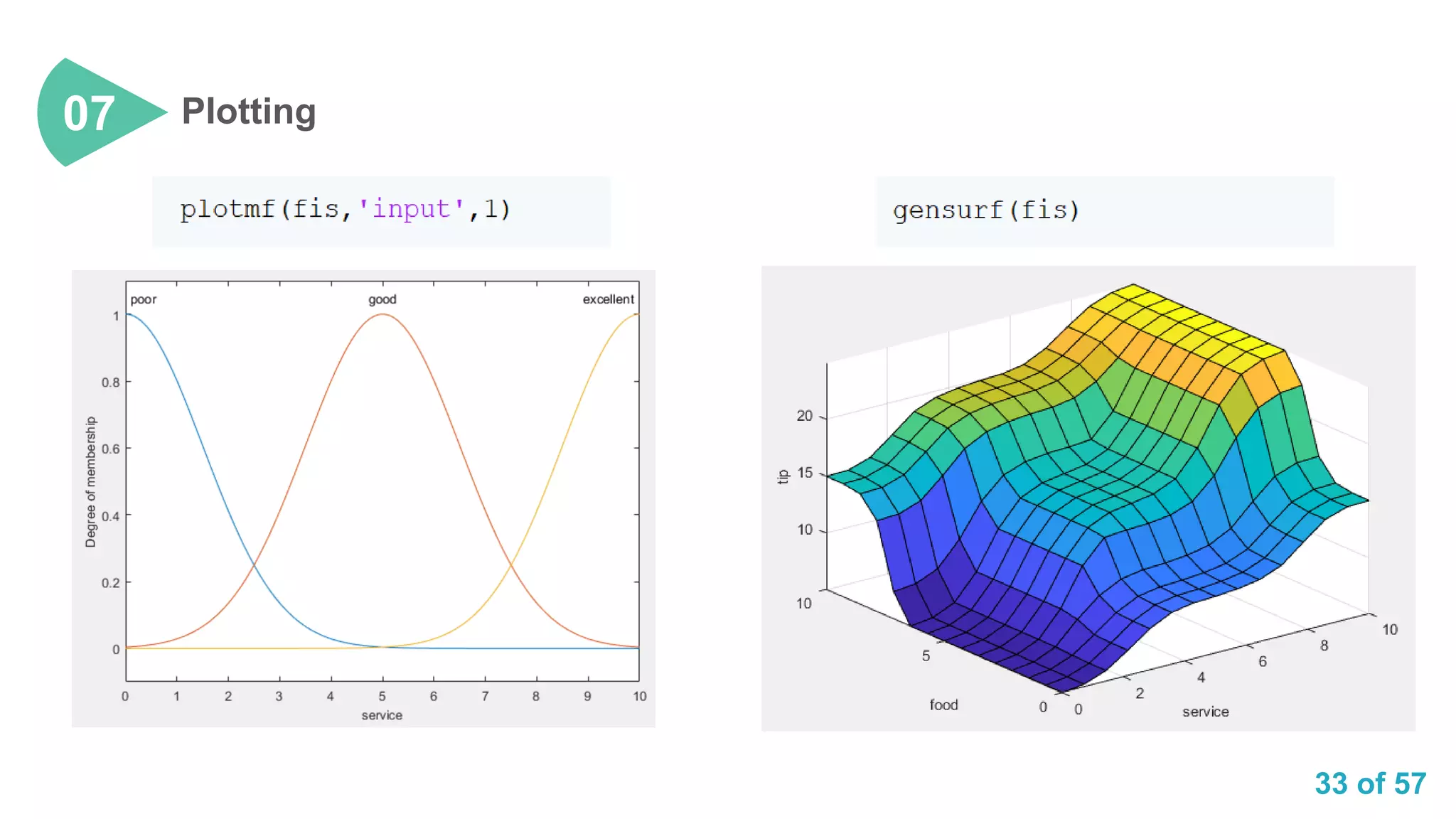
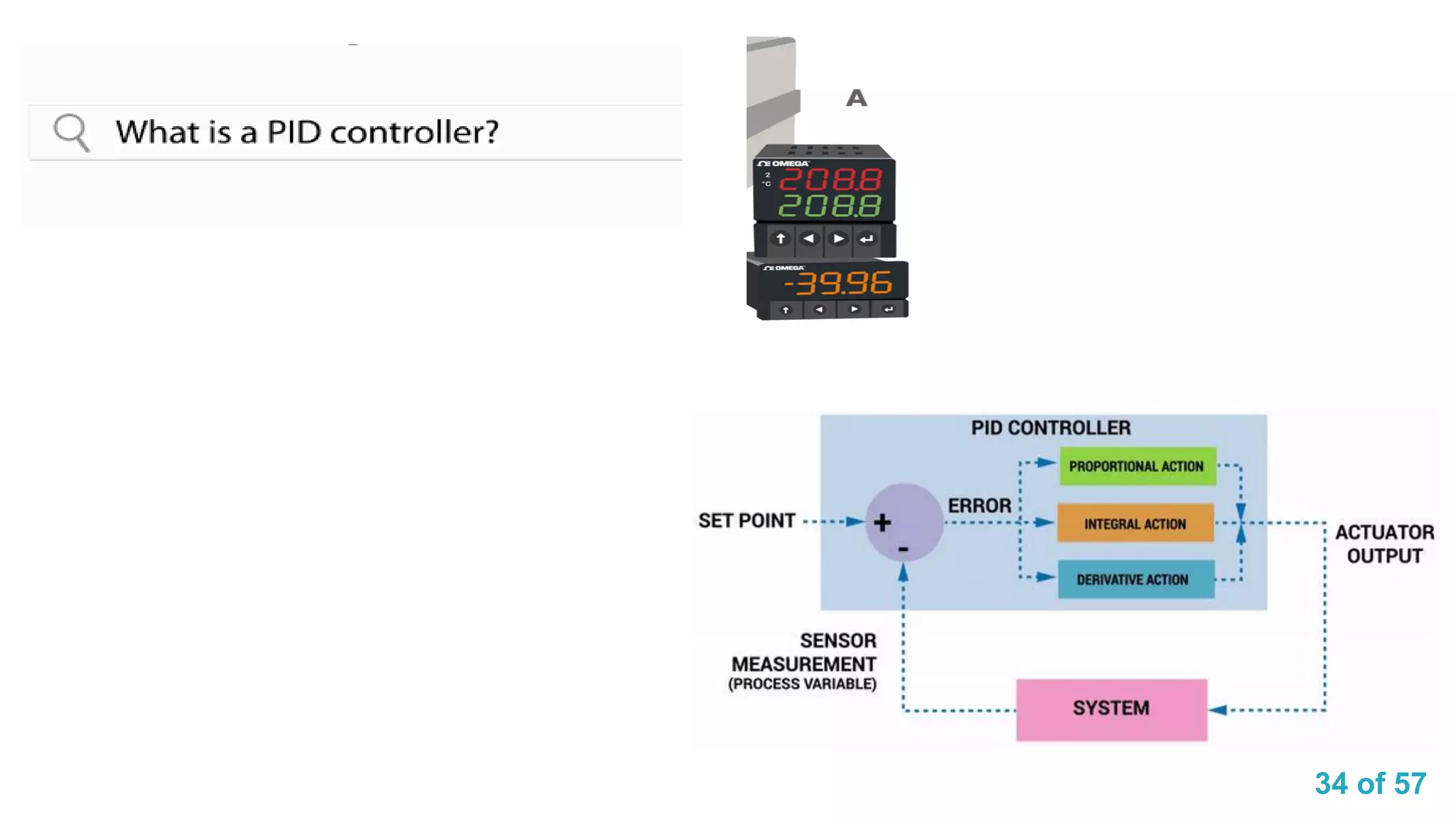
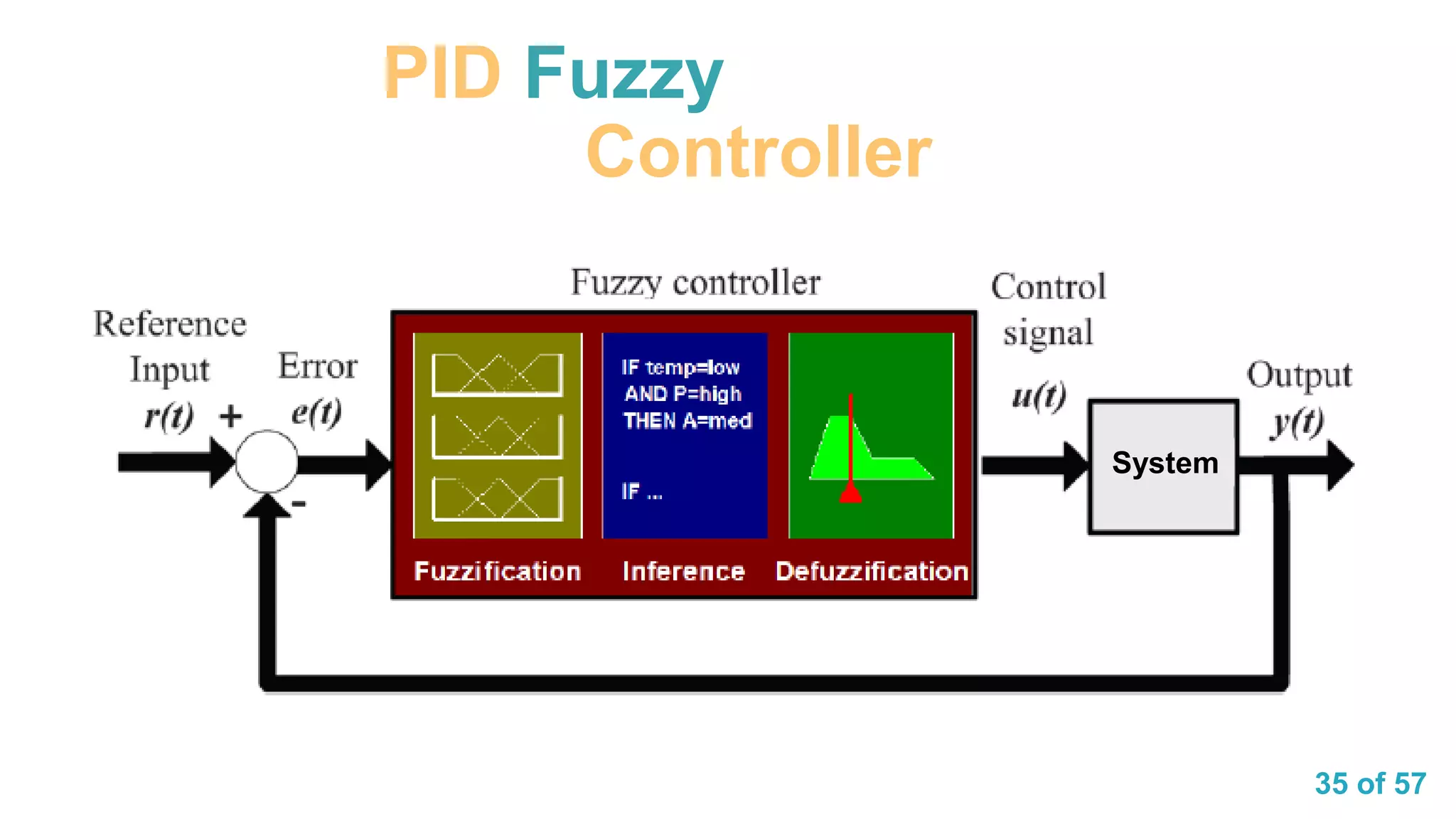
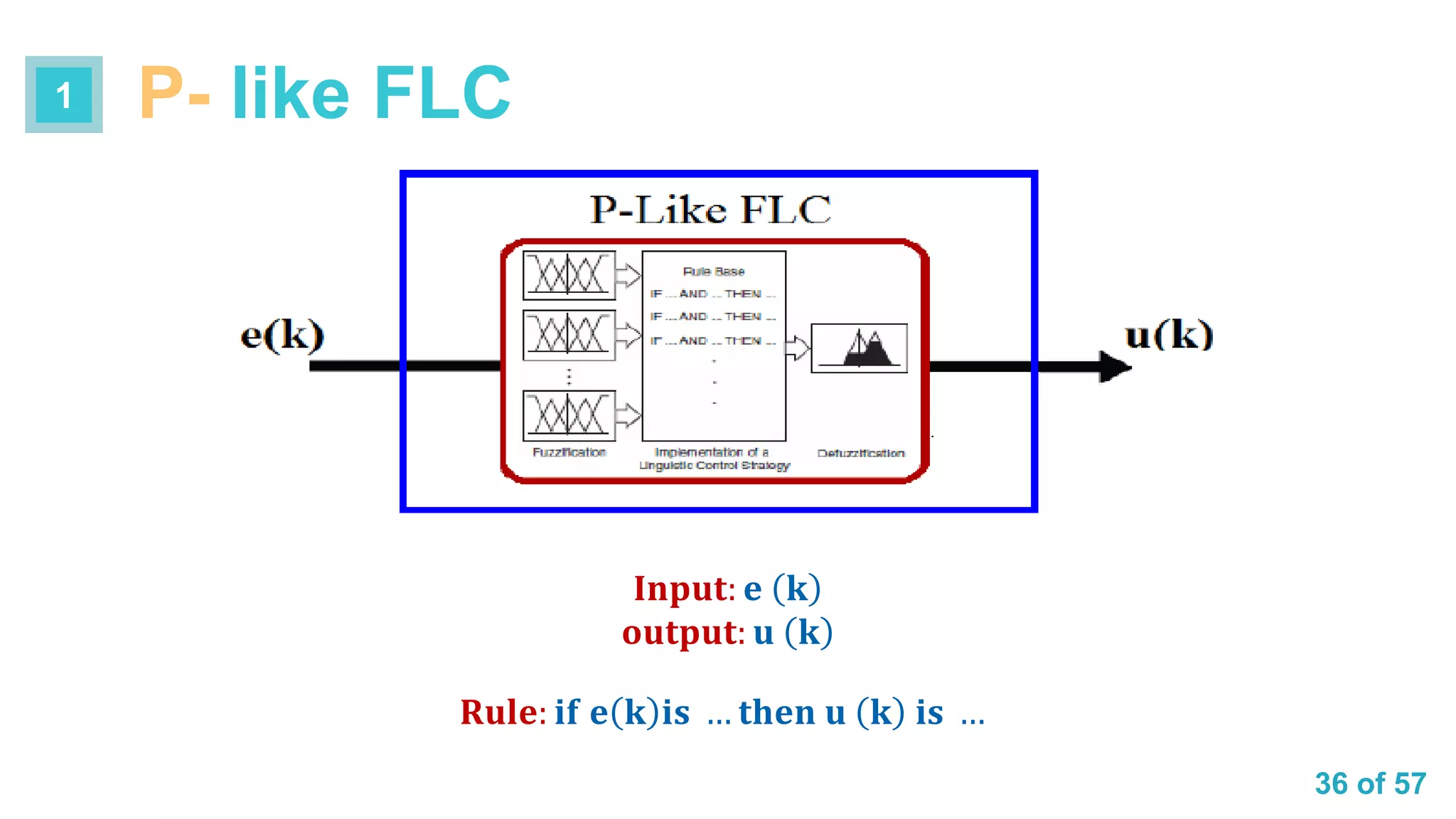
This document provides an introduction to fuzzy logic and fuzzy systems. It discusses classical set theory versus fuzzy set theory and membership functions. Types of fuzzy membership functions like triangular, trapezoidal, and Gaussian are shown. The key components of a fuzzy logic controller including fuzzification, fuzzy inference system, and defuzzification are described. Several defuzzification methods such as mean of maxima, centroid, and approximate centroid are explained. Examples of fuzzy applications in areas like washing machines and autonomous vehicles are presented. The document also discusses building fuzzy systems using MATLAB/Simulink and at the command line. Finally, it briefly introduces PID fuzzy controllers.










































![1.[1 5]implementation of pre compensation fuzzy for a cascade pid controller ...](https://cdn.slidesharecdn.com/ss_thumbnails/1-1-5implementationofprecompensationfuzzyforacascadepidcontrollerusingmatlabsimulink-111203184832-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)












![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)










