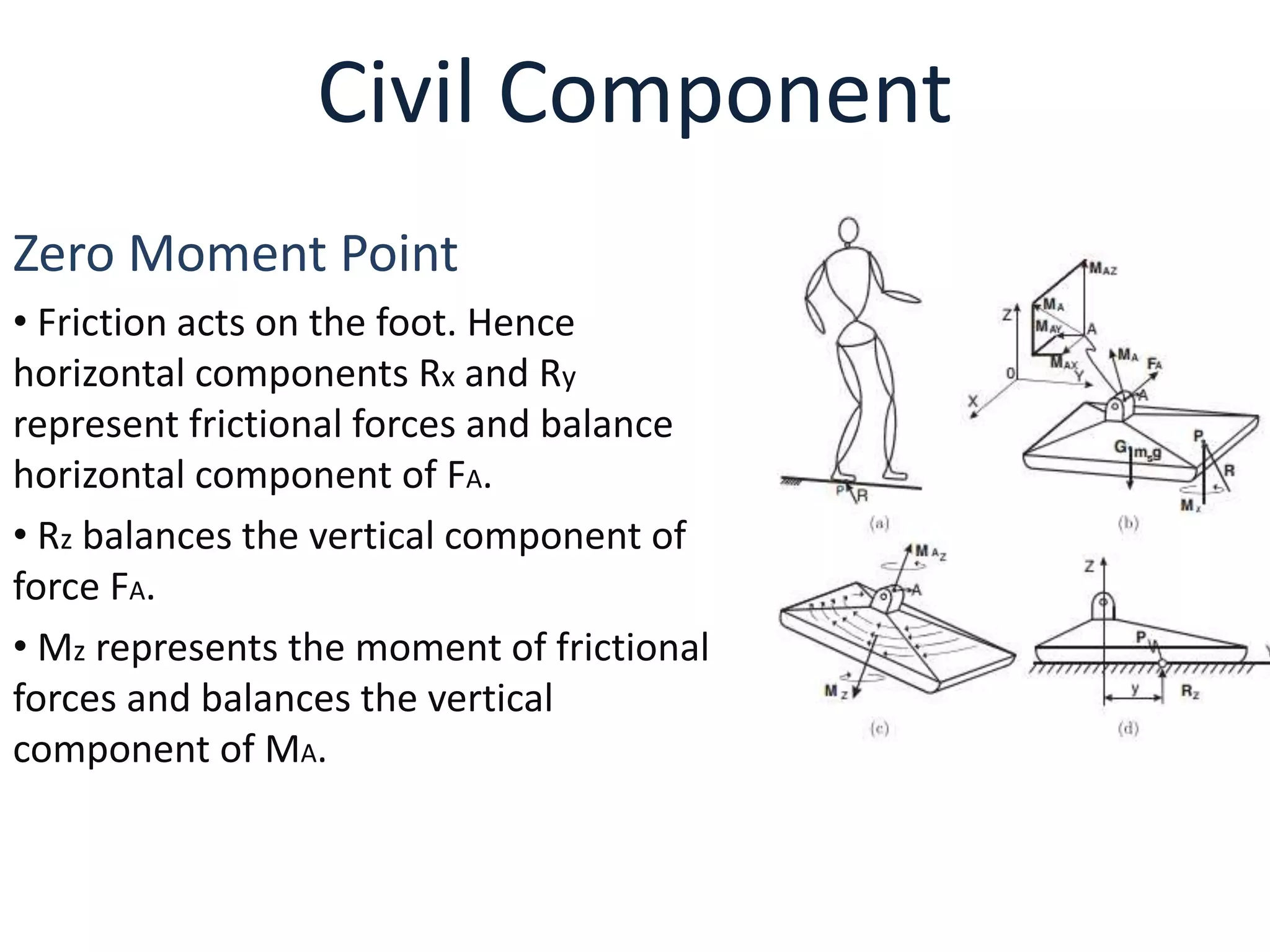
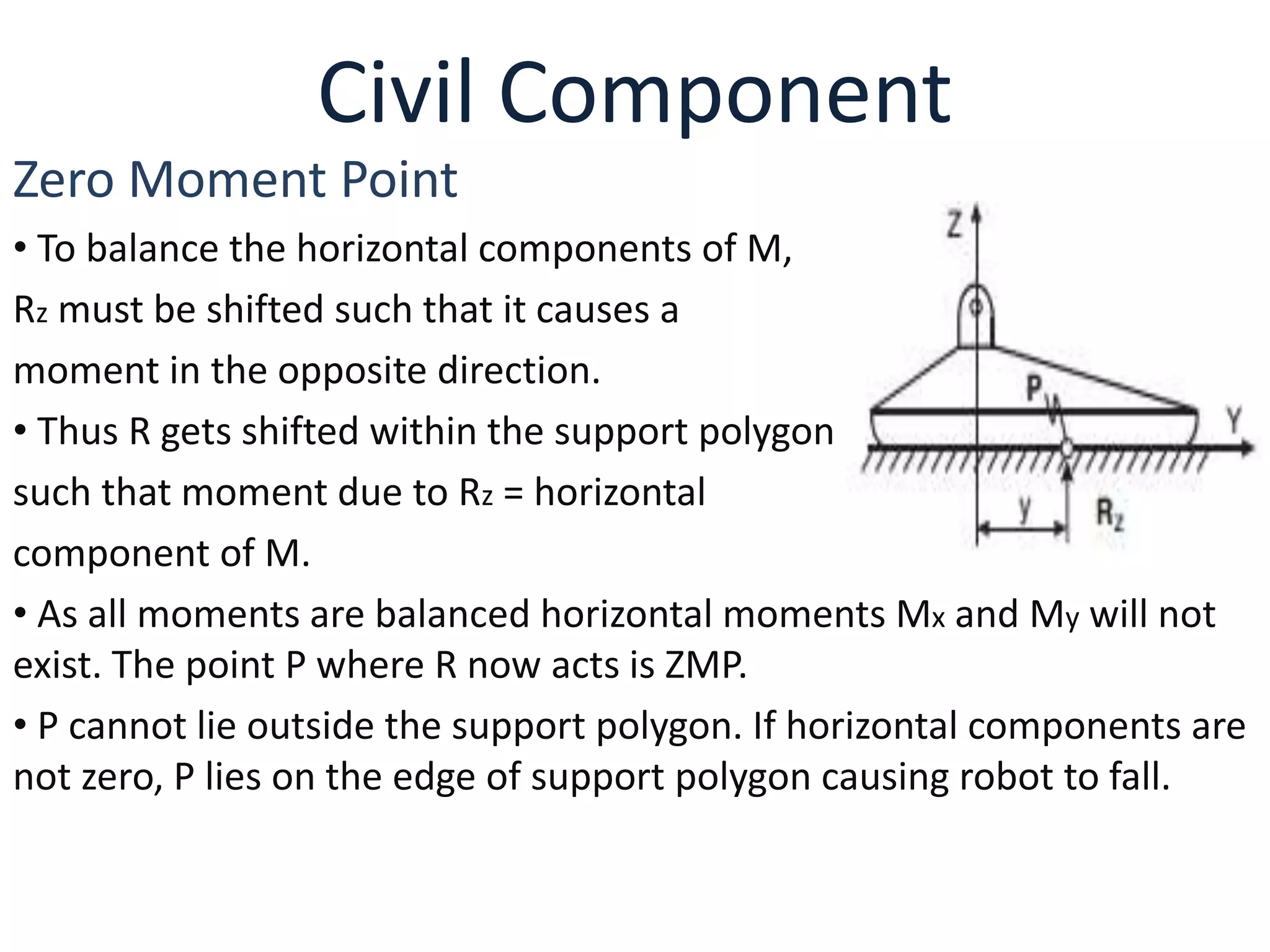
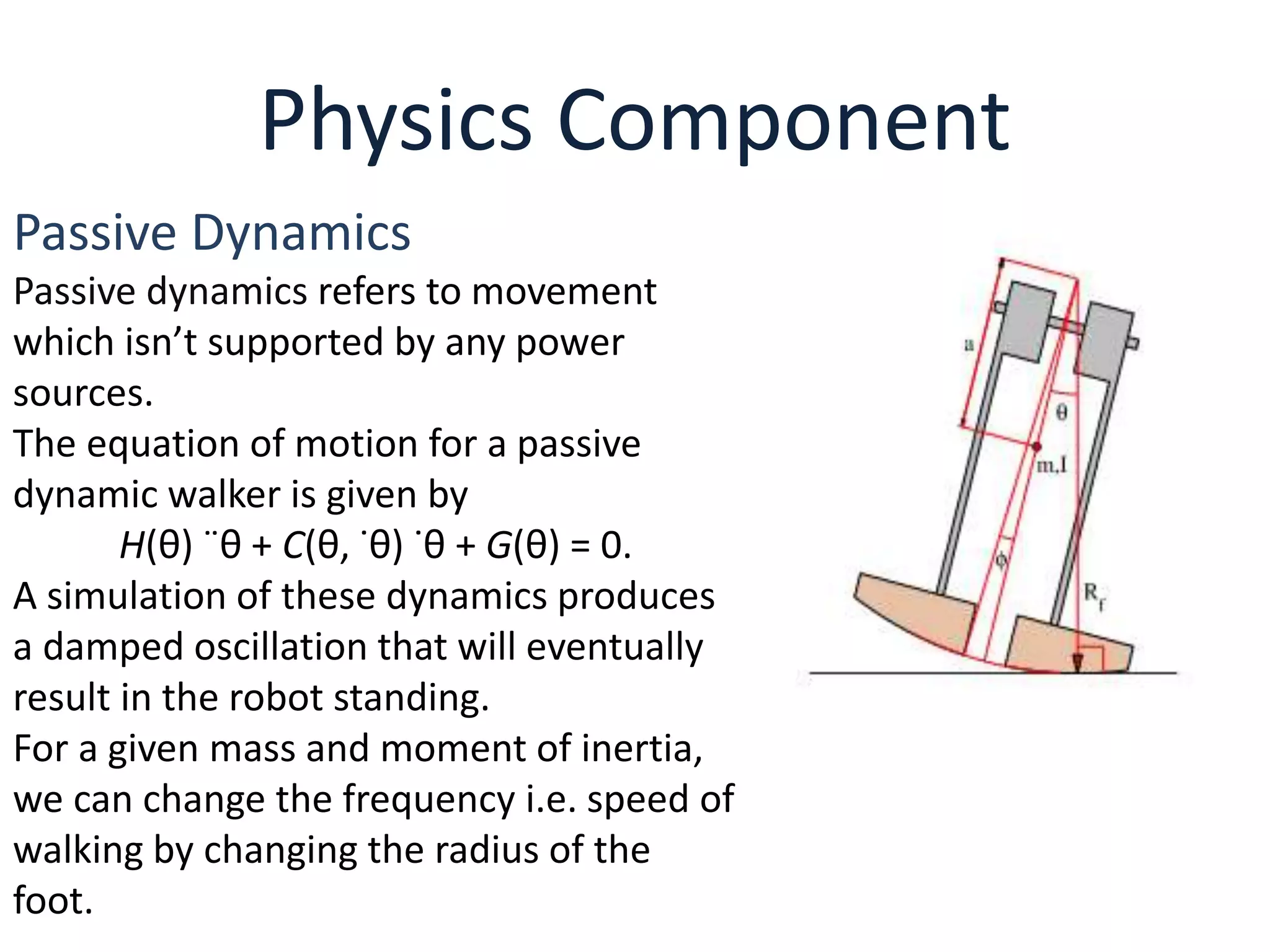
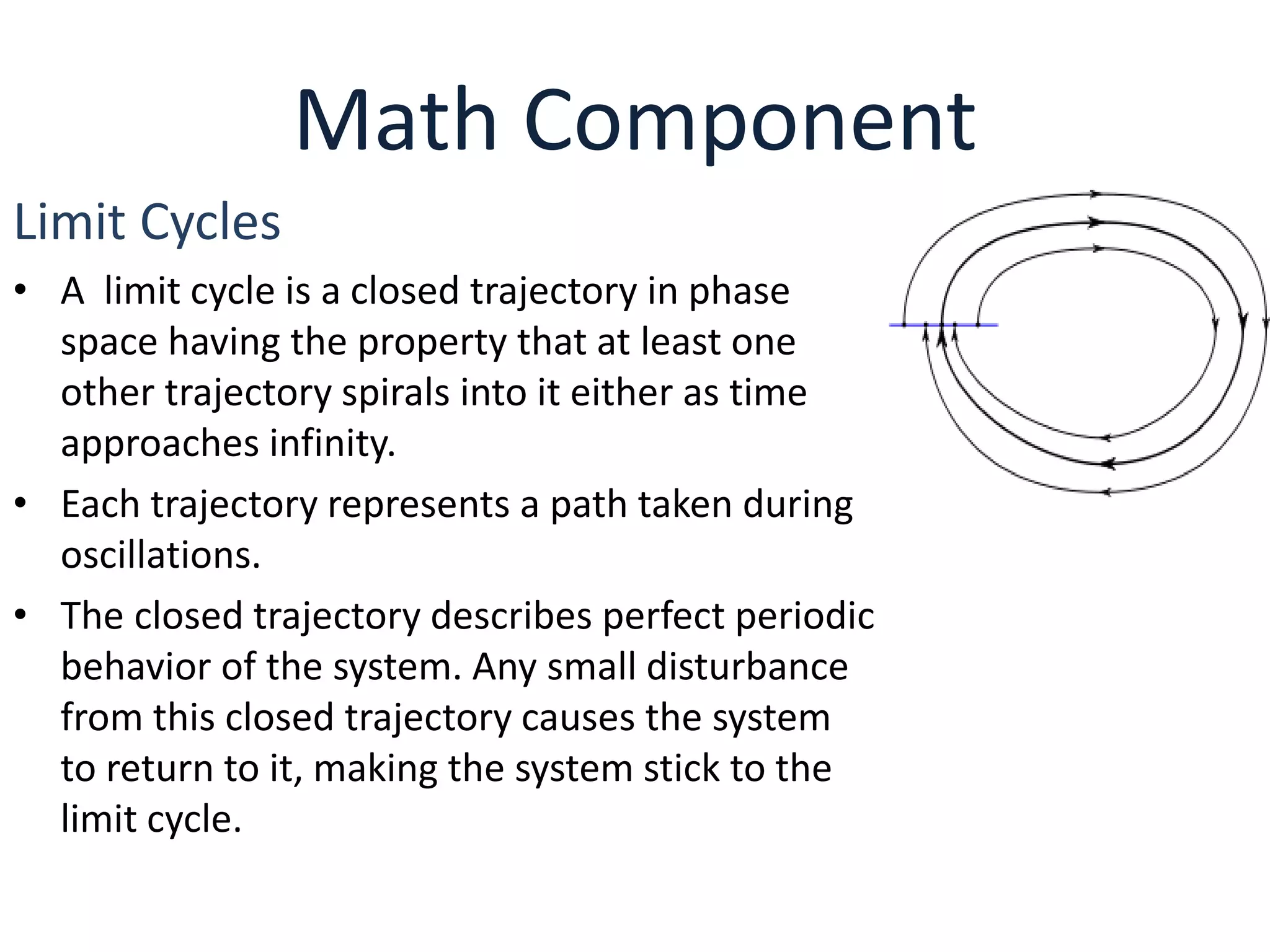
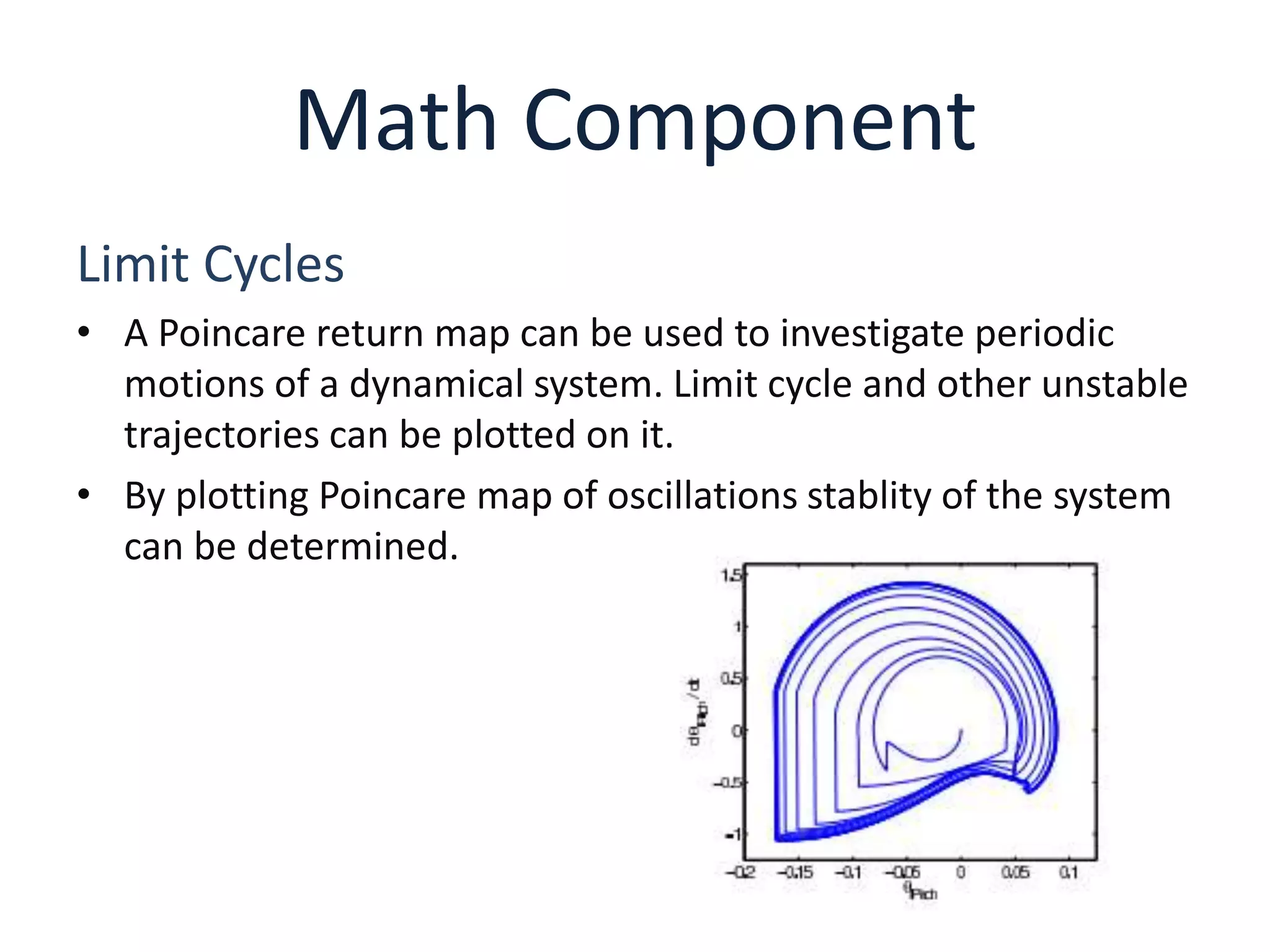
This document discusses stability analysis and robustness of motion for humanoid robots. It describes the need for humanoid robots, their components including sensors and actuators, and approaches for stable motion. The key approaches discussed are zero moment point theory, passive dynamics, capture points and regions, and limit cycles. Zero moment point theory aims to keep the point of ground reaction forces within the robot's support polygon to maintain stability. Passive dynamics utilizes natural dynamics from gravity and inertia for motion. Capture points allow a robot to stop by placing its center of pressure at a specific point. Limit cycles describe perfect periodic behavior that a robot's oscillations can approach.











![Robot operating system [ROS]](https://cdn.slidesharecdn.com/ss_thumbnails/robotoperatingsystemautosaved-200614222945-thumbnail.jpg?width=640&height=640&fit=bounds)