

Recommended
More Related Content
What's hot
What's hot (20)
Similar to robot classification
Similar to robot classification (20)
More from Mohit Jain
More from Mohit Jain (9)
Recently uploaded
Recently uploaded (20)
robot classification
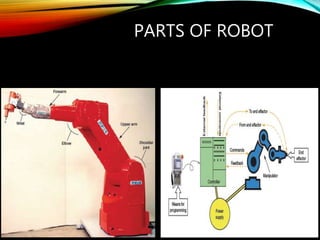
- 2. What are the parts of a robot? • Manipulator • Pedestal • Controller • End Effectors • Power Source
- 4. Pedestal (Human waist) •Supports the manipulator. •Acts as a counterbalance.
- 5. Controller (The brain) • Issues instructions to the robot. • Controls peripheral devices. • Interfaces with robot. • Interfaces with humans.
- 6. End Effectors (The hand) • Spray paint attachments • Welding attachments • Vacuum heads • Hands • Grippers
- 7. Power Source (The food) • Electric • Pneumatic • Hydraulic
- 8. ROBOT JOINTS Prismatic Joint: Linear, No rotation involved. (Hydraulic or pneumatic cylinder) Revolute Joint: Rotary, (electrically driven with stepper motor, servo motor)
- 9. ROBOT COORDINATES • Cartesian/rectangular/gantry (3P) : 3 cylinders joint • Cylindrical (R2P) : 2 Prismatic joint and 1 revolute joint • Spherical (2RP) : 1 Prismatic joint and 2 revolute joint • Articulated/anthropomorphic (3R) : All revolute(Human arm) • Selective Compliance Assembly Robot Arm (SCARA): 2 paralleled revolute joint and 1 additional prismatic joint • Delta : These spider like robots are built from jointed parallel ograms connected to a common base.
- 19. Cylindrical Coordinate System Y - Axis
- 20. Cylindrical Coordinate System Z - Axis
- 21. Cylindrical Coordinate System q - Axis
- 26. Polar (Spherical) Coordinate System - Axis
- 27. Polar (Spherical) Coordinate System q - Axis
- 28. Polar (Spherical) Coordinate System g - Axis
- 32. Revolute (Joined-Arm) Coordinate System a - Axis
- 33. Revolute (Joined-Arm) Coordinate System - Axis
- 34. Revolute (Joined-Arm) Coordinate System q - Axis
- 39. Robotics Joints
- 40. Robots degrees of freedom • Degrees of Freedom: Number of independent position variables which would has to be specified to locate all parts of a mechanism. • In most manipulators this is usually the number of joints.
- 41. Fig. 1.3 A Fanuc P-15 robot. Reprinted with permission from Fanuc Robotics, North America, Inc. Consider what is the degree of Fig. 3 1 D.O.F. 2 D.O.F. 3 D.O.F. ROBOTS DEGREES OF FREEDOM
- 42. Degrees of Freedom VS Degrees of freedom (DOF) is a term used to describe a robot’s freedom of motion in three dimensional space— specifically, the ability to move forward and backward, up and down, and to the left and to the right. For each degree of freedom, a joint is required. A robot requires six degrees of freedom to be completely versatile.
- 46. Degrees of Freedom • Rotating the base.
- 47. Degrees of Freedom • Pivot the base of the arm.
- 48. Degrees of Freedom • Bending the elbow.
- 49. Degrees of Freedom • Wrist up and down.
- 50. Degrees of Freedom • Wrist left and right.
- 51. Degrees of Freedom •Rotating the wrist.
- 52. ROBOT WORKSPACE Fig. 1.7 Typical workspaces for common robot configurations
- 54. JOINT SYMBOL
- 56. • Reach and Stroke • Performance parameters
- 59. PERFORMANCE PARAMETERS :ACCURACY & REPEATABILITY • Repeatability - is how well the robot will return to a programmed position. This is not the same as accuracy. It may be that when told to go to a certain X-Y-Z position that it gets only to within 1 mm of that position. This would be its accuracy which may be improved by calibration. But if that position is taught into controller memory and each time it is sent there it returns to within 0.1mm of the taught position then the repeatability will be within 0.1mm. •Accuracy – is how closely a robot can reach a commanded position. •When the absolute position of the robot is measured and compared to the commanded position the error is a measure of accuracy. •Accuracy can be improved with external sensing for example a vision system or Infra-Red. See robot calibration. • Accuracy can vary with speed and position within the working envelope and with payload (see compliance).
- 60. RESOLUTION • Resolution The resolution of a robot is a feature determined by the design of the control unit and is mainly dependent on the position feedback sensor. • It is important to distinguish the programming resolution from the control resolution. • The programming resolution is the smallest allowable position increment in robot programs and is referred to as the basic resolution unit (BRU). • For IRB2000 ABB robot it is approximately 0,125 mm on linear axis. • The control resolution is the smallest change in position that the feedback device can sense. • For example, assume that an optical encoder which emits 1000 pulses per revolution of the shaft is directly attached to a rotary axis. This encoder will emit one pulse for each of 0,36° of angular displacement of the shaft. • The unit 0,36° is the control resolution of this axis of motion.
- 61. FIGURE: ERROR AFFECTING CONTROL RESOLUTION
- 63. HYDRAULIC SYSTEM Power Packs 1. Reservoir 2. Hydraulic pump 3. Electric motor 4. Valves 5. Hoses and pipes
- 64. ROBOT REFERENCE FRAMES Fig. 1.6 A robot’s World, Joint, and Tool reference frames. Most robots may be programmed to move relative to either of these reference frames.