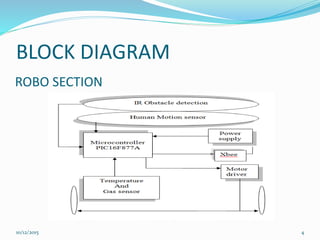
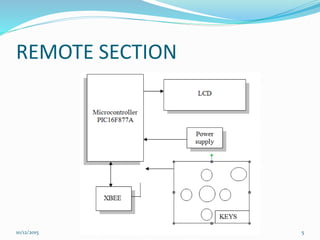
The document describes a project focused on developing a human detection robot utilizing RF Zigbee communication, aimed at military, security, and disaster recovery applications. It provides details on the components used, including various sensors and microcontrollers, and outlines the system's operational flow. Limitations of the project are acknowledged, particularly concerning programming memory and communication range.


![293D LOGIC TABLE.
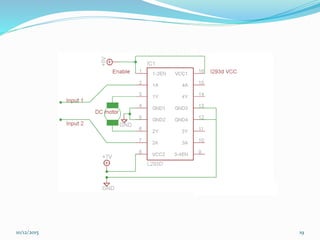
• Pin 2 = Logic 1 and Pin 7 = Logic 0 | Clockwise
• Pin 2 = Logic 0 and Pin 7 = Logic 1 | Anticlockwise
• Pin 2 = Logic 0 and Pin 7 = Logic 0 | Idle [No rotation]
• Pin 2 = Logic 1 and Pin 7 = Logic 1 | Idle [No rotation]
In a very similar way the motor can also operated across input
pin 15,10 for motor on the right hand side.
10/12/2015 20](https://image.slidesharecdn.com/presentation3-151012143747-lva1-app6892/85/Human-Detection-Robot-20-320.jpg)







































![Human presence detection based room light controller using pir2.pptx [repaired]](https://cdn.slidesharecdn.com/ss_thumbnails/humanpresencedetectionbasedroomlightcontrollerusingpir2-160418083434-thumbnail.jpg?width=640&height=640&fit=bounds)