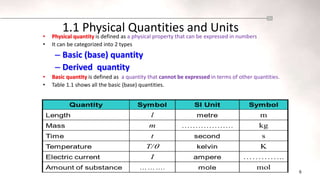
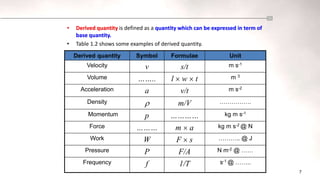
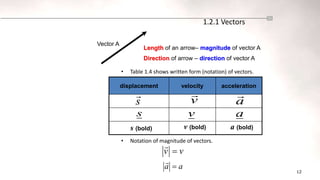
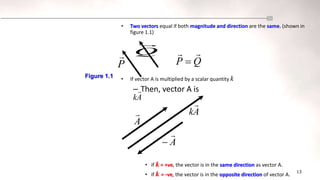
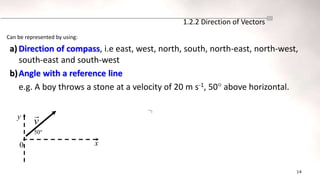
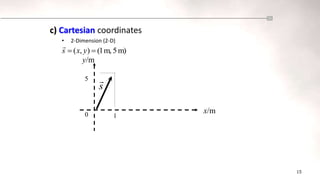
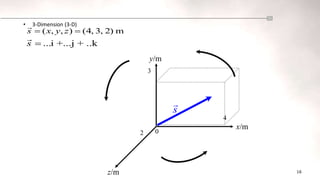
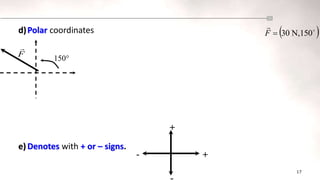
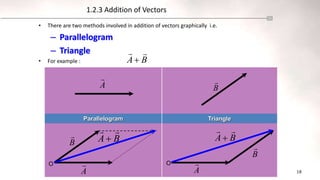
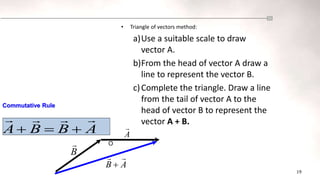
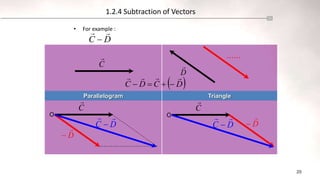
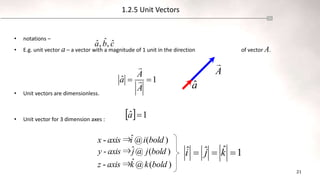
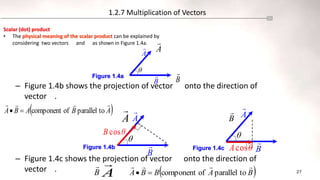
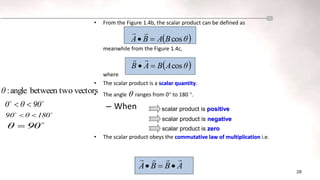
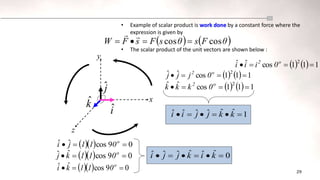
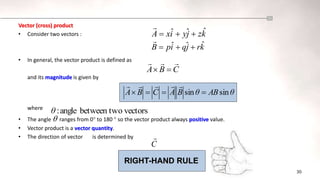
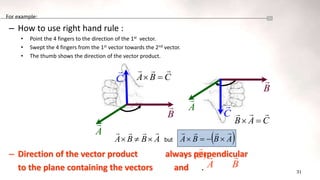
This document provides an overview of foundation and materials science studies, including physics and mathematics. It covers topics such as physical quantities and units, scalars and vectors, and multiplication of vectors. Specifically, it defines basic and derived physical quantities and their SI units. It also describes vector addition and subtraction graphically using parallelograms and triangles. Vector components are resolved into x- and y-axes and unit vectors. Scalar (dot) and vector (cross) products are defined, with scalar products providing the parallel component between two vectors and vector products determining the perpendicular component. Examples of each are given using unit vectors.