Download as PPSX, PPTX
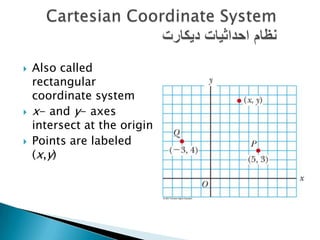
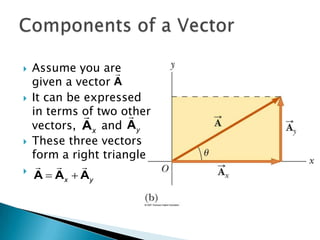
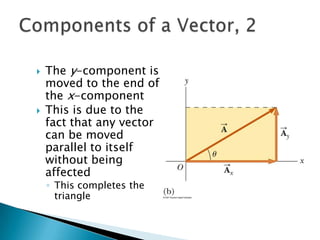
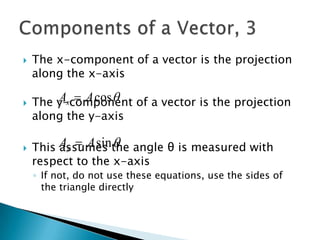
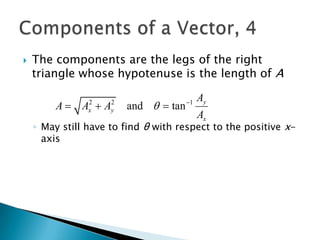
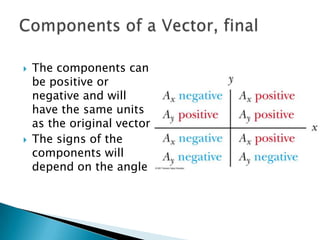
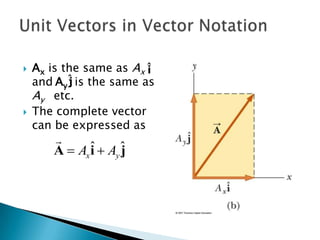
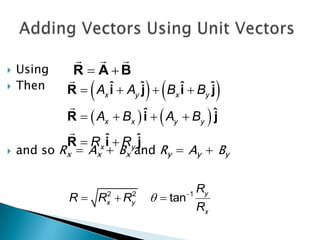
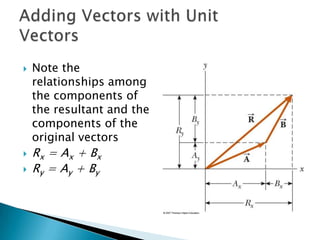
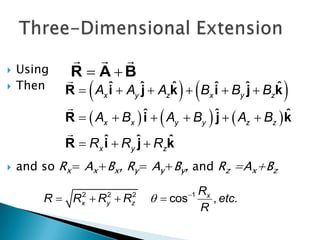
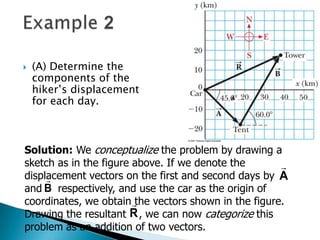
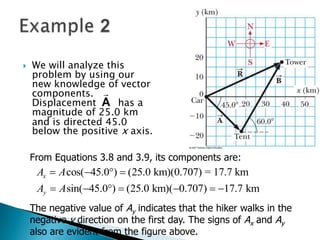
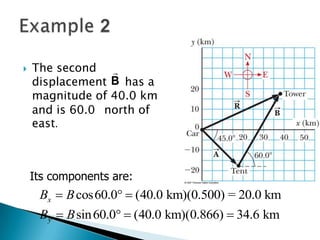
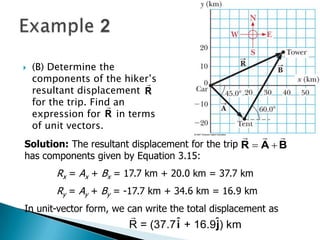
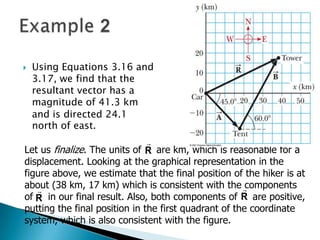

1) The document describes vectors and motion in two dimensions, including defining vectors, coordinate systems, vector addition and subtraction using graphical and algebraic methods, and vector components. 2) It provides an example of finding the displacement vectors for each day of a hiker's trip, then using those to find the overall displacement vector for the entire trip. 3) The hiker walked 25km southeast on the first day. On the second day, she walked 40km in a direction 60 degrees north of east. The overall displacement vector was calculated to be 37.7km along the x-axis and 16.9km along the y-axis, or 41.3km at an angle of 24.1 degrees north






























































































