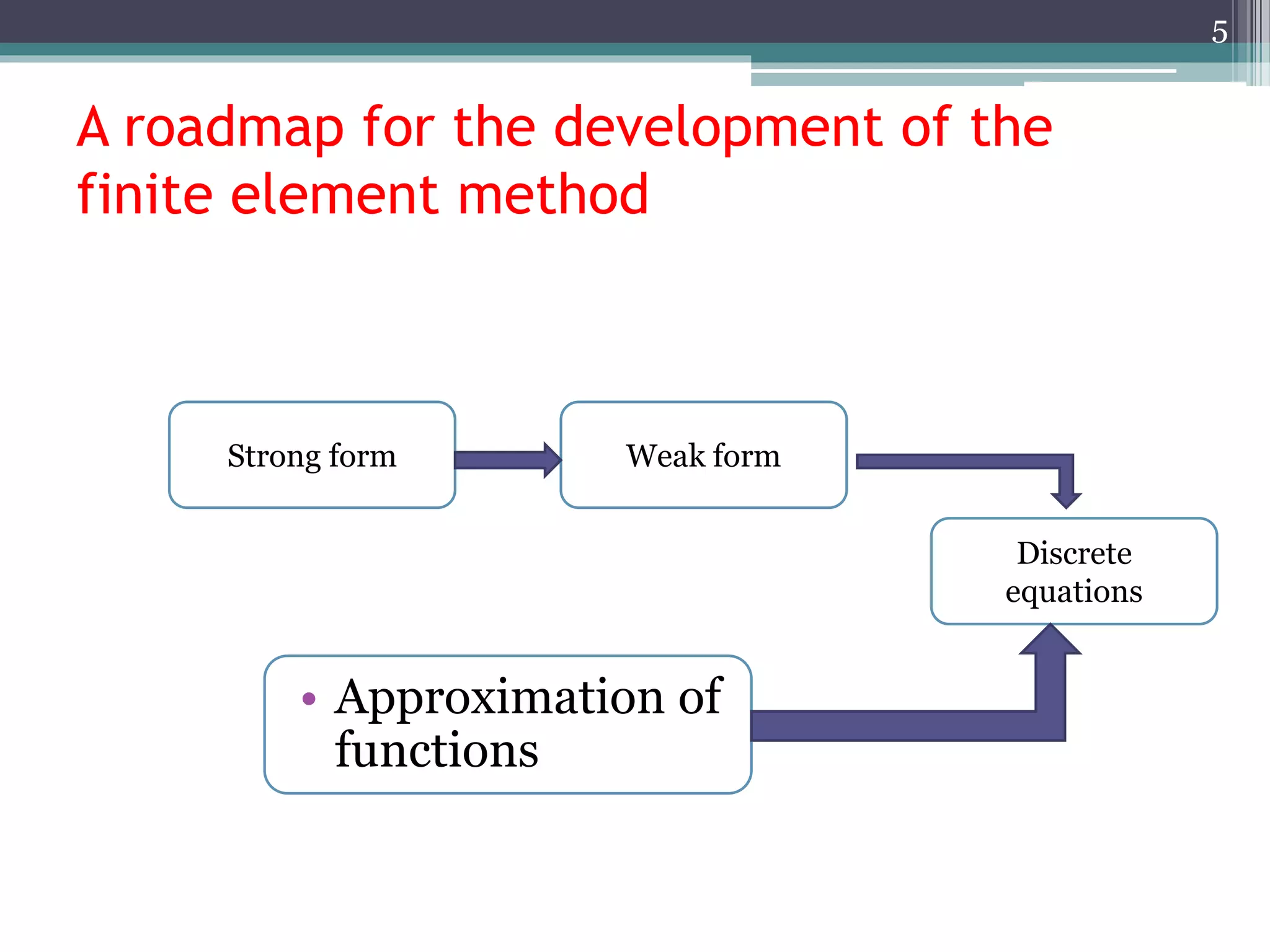
- The document discusses the strong form and weak form for analyzing an axially loaded elastic bar.
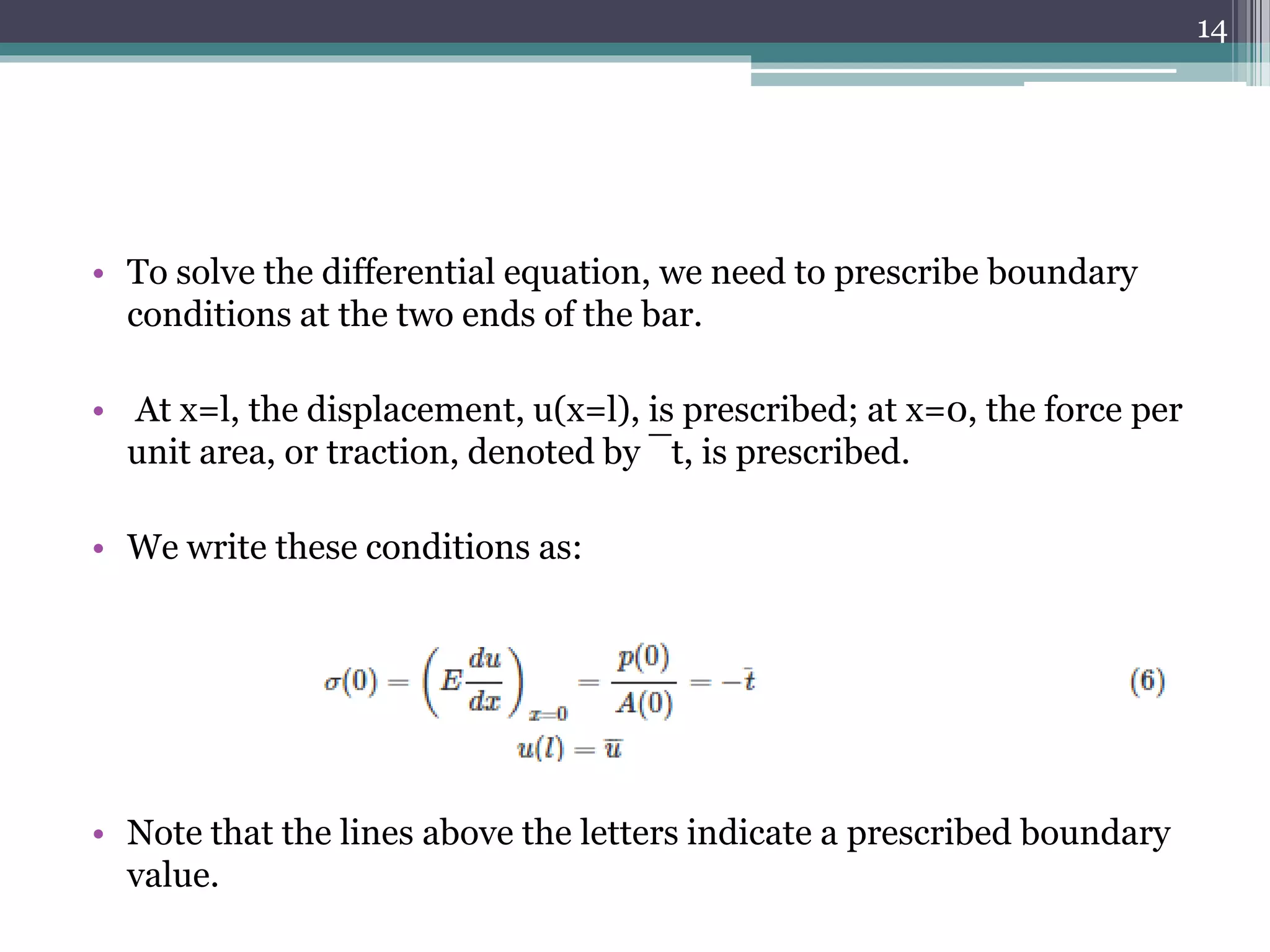
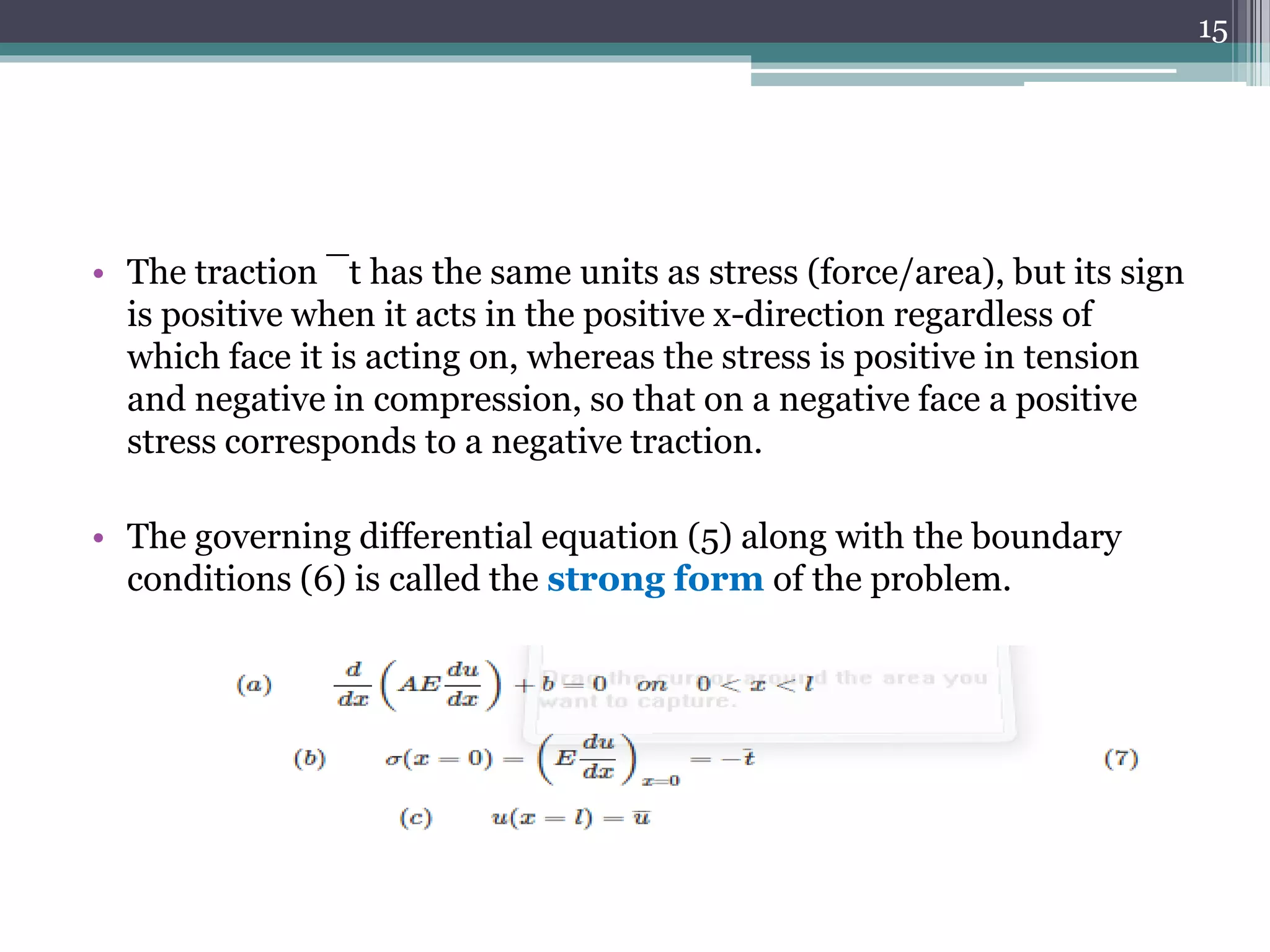
- The strong form consists of the governing differential equations and boundary conditions. For the bar example, this includes the equilibrium equation and stress-strain relationships.
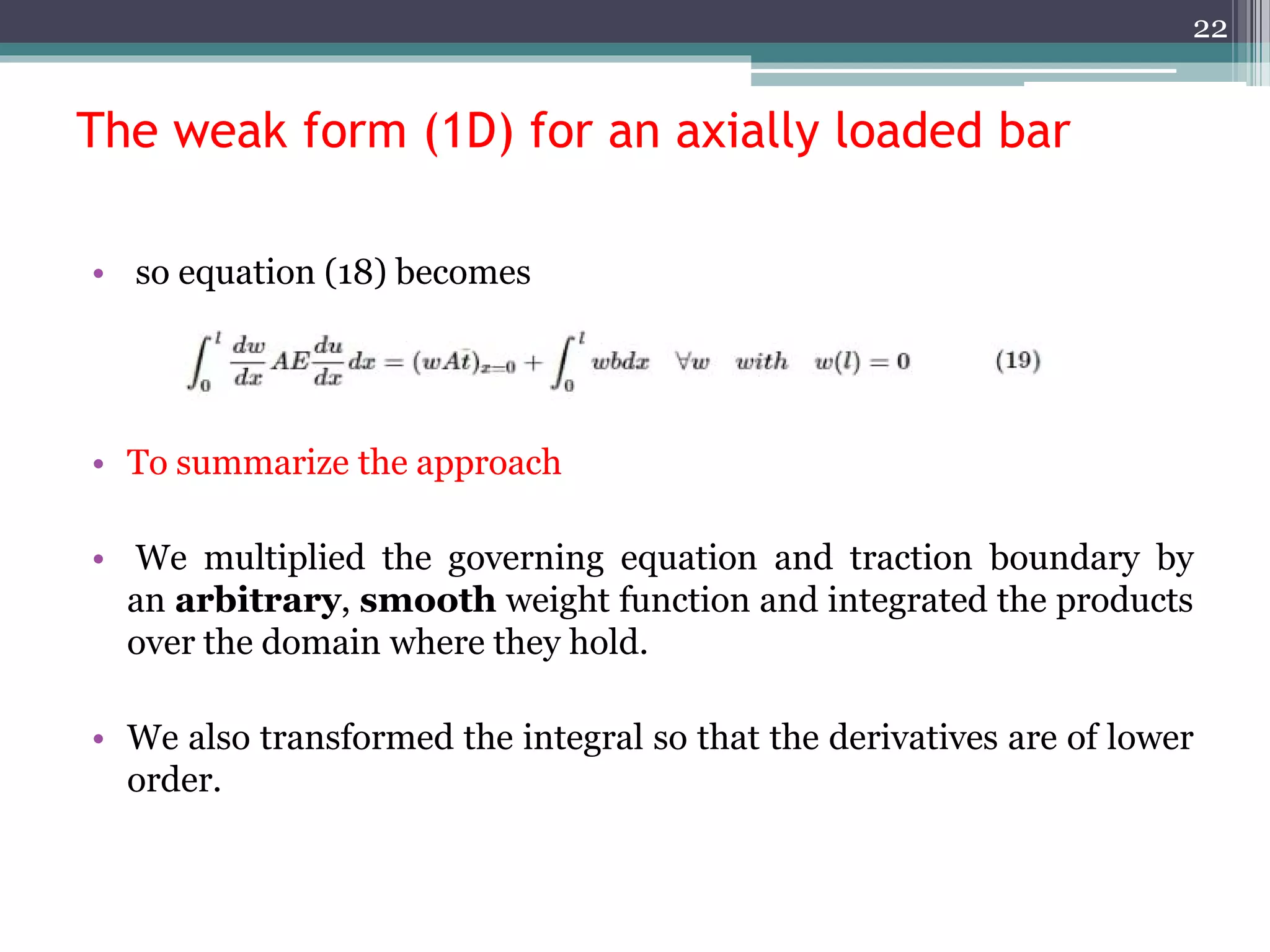
- The weak form is developed by multiplying the strong form equations by a weight function, integrating over the domain, and using integration by parts. This transfers the derivatives from the displacement variable to the weight function.
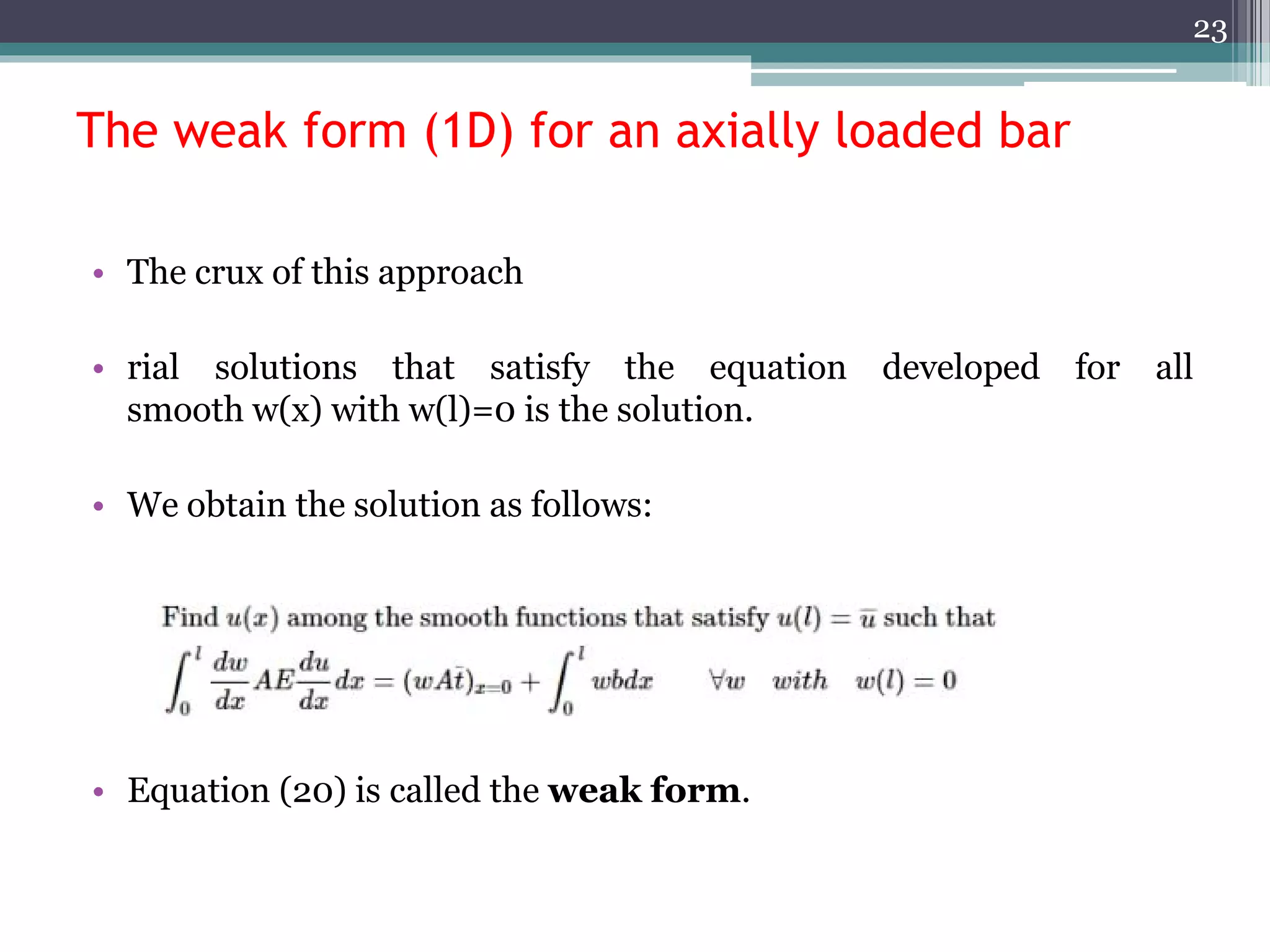
- For the bar example, the weak form results in an equation that must hold for all admissible weight functions, and naturally includes the traction boundary conditions while only requiring the trial solutions to satisfy the essential displacement boundary conditions.
![The weak form (1D) for an axially loaded bar
• the pertinent domain is [0,l]
• For the traction boundary, it is the cross-sectional area at x = 0 (no
integral needed since this condition only holds only at a point but
we multiply it with A).
• The results are:
• The function w is called weight function or test function.
17](https://image.slidesharecdn.com/strongformandweakform-explanationthroughexamplesofabarenno19565001-200610181757/75/Strong-form-and-weak-form-explanation-through-examples-of-a-bar-en-no-19565001-17-2048.jpg)