Downloaded 22 times


![15www.esi-group.com
Copyright © ESI Group, 2019. All rights reserved.
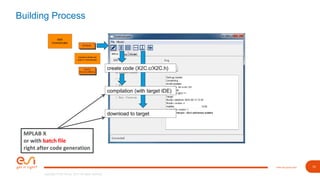
Workflow (existing project + compileandflash.bat)
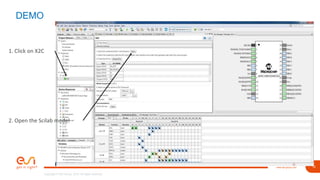
1. Start MPLAB X + open project + MCC
2. Goto X2C MCC library [MPLAB X]
3. Open model [MPLAB X-X2C MCC lib]
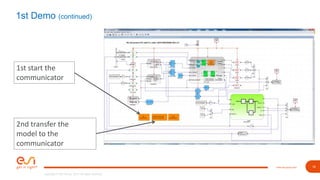
4. Start the Communicator [XCOS]
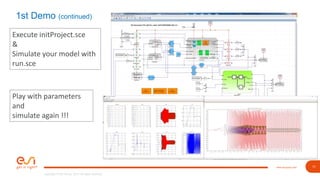
5. Develop the model [XCOS]
6. Transform Model and push to
communicator [XCOS]
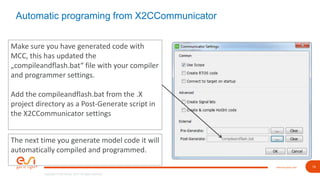
7. Generate C-code (automatically executes
the post process batch for compiling and
programming) [Communicator]
8. {Verify UART settings [Communicator]}
9. {Connect to hardware [Communicator]}
10. {Start Scope [Communicator]}
11. Modify block parameters [Communicator or
XCOS]
12. Restart at 5
4 6
1
2
3
7
9 10](https://image.slidesharecdn.com/scilabconference2019microchiprapidprototyping-191015164357/85/Faster-Time-to-Market-using-Scilab-XCOS-X2C-for-motor-control-algorithm-development-15-320.jpg)
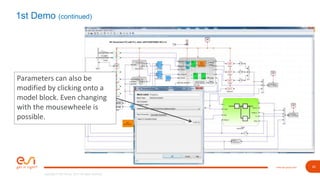
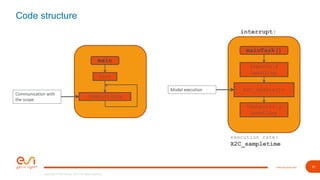



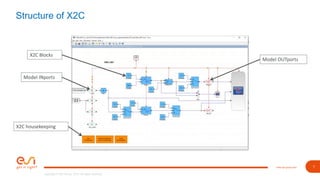
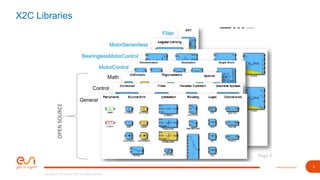
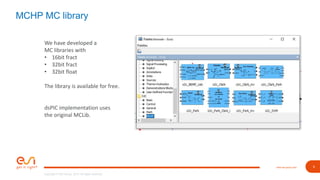
The document discusses the use of Scilab/Xcos/X2C for rapid prototyping in motor control algorithm development, emphasizing the integration with Microchip tools such as MPLAB X. It provides an overview of the workflow, installation, and capabilities of the X2C library, highlighting features like code generation, real-time debugging, and automated documentation. The session culminates in a demo showcasing model simulation and parameter adjustments within the X2C framework.