Download to read offline

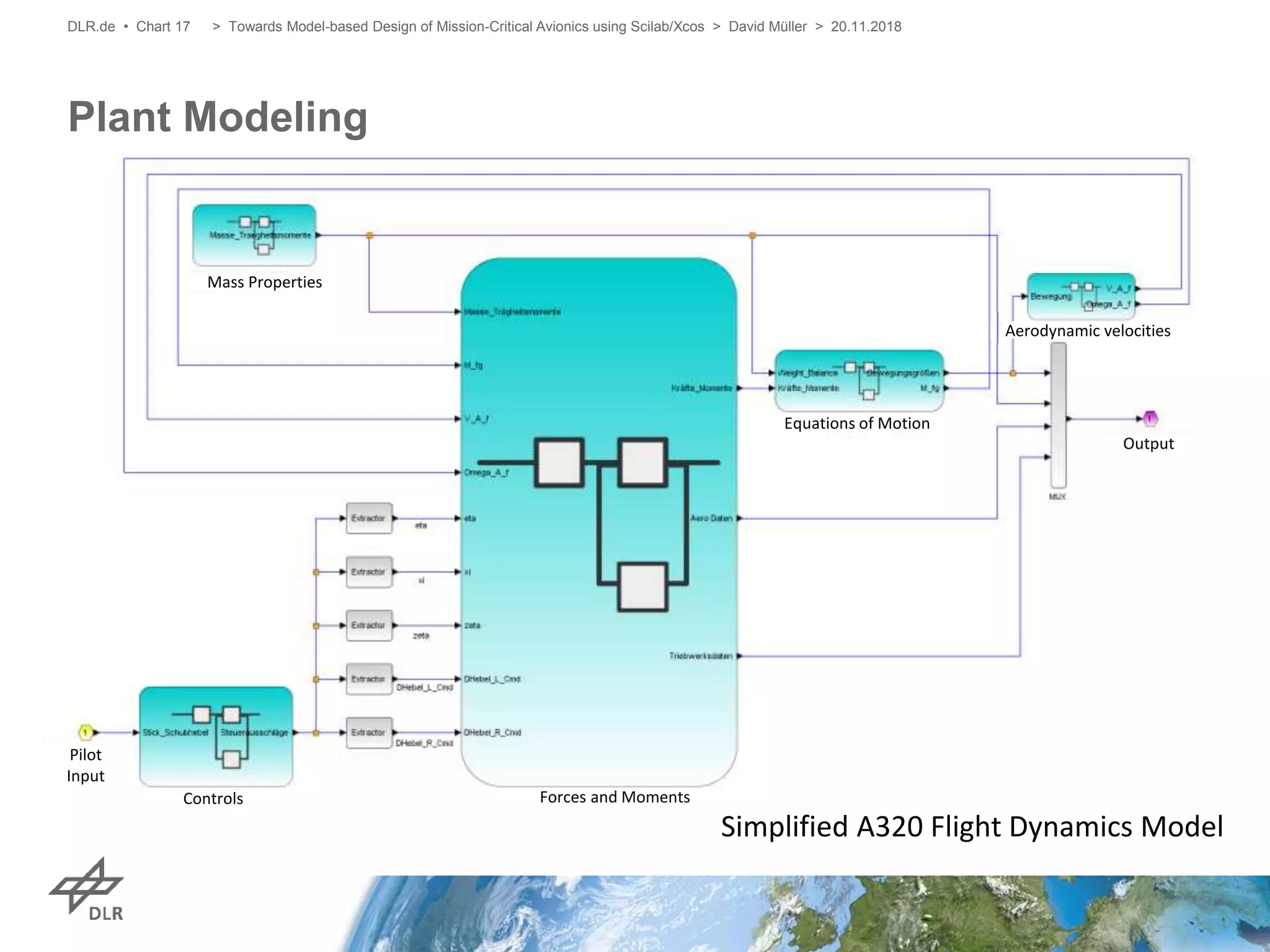
![ARGO Model-Based Design Workflow
DLR.de • Chart 19
Application Test
Cases
Xcos / Scilab
Application Models
Cross-layer
Programming Interface
Feedback&Control
Scheduling and High-Level
Decisions
Code Transformations for
Predictability
Enhancement
Data Management,
Synchronization and Code
Generation
Code-Level WCET
System-Level WCET
CPU
CPU CPU
CPU
Multicore
ArchitecturesIterative
Optimization
Front-End Tools
ADL Description
int m, n, p, q, c, d, k, sum = 0;
int first[10][10], second[10][10],
multiply[10][10];
for (c = 0; c < m; c++) {
for (d = 0; d < q; d++) {
for (k = 0; k < p; k++) {
sum = sum + first[c][k]*second[k][d];
}
multiply[c][d] = sum;
sum = 0;
}
}
Xcos
model
Scilab
script
Sequential
Code
Parallel
Code
> Towards Model-based Design of Mission-Critical Avionics using Scilab/Xcos > David Müller > 20.11.2018](https://image.slidesharecdn.com/presentationscilabconference2018dlrmueller-181128181500/75/DLR-Scilab-Conference-2018-19-2048.jpg)
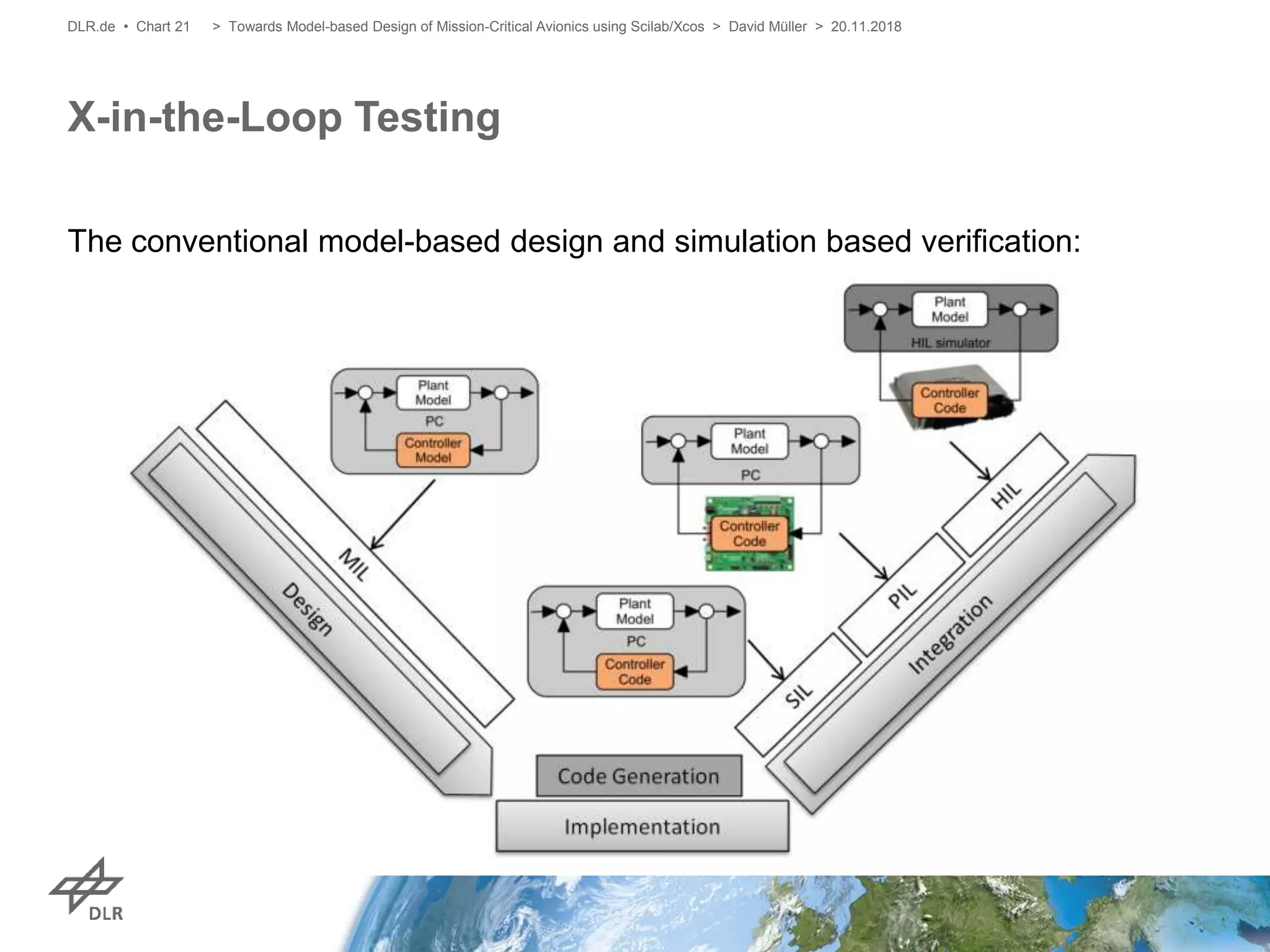
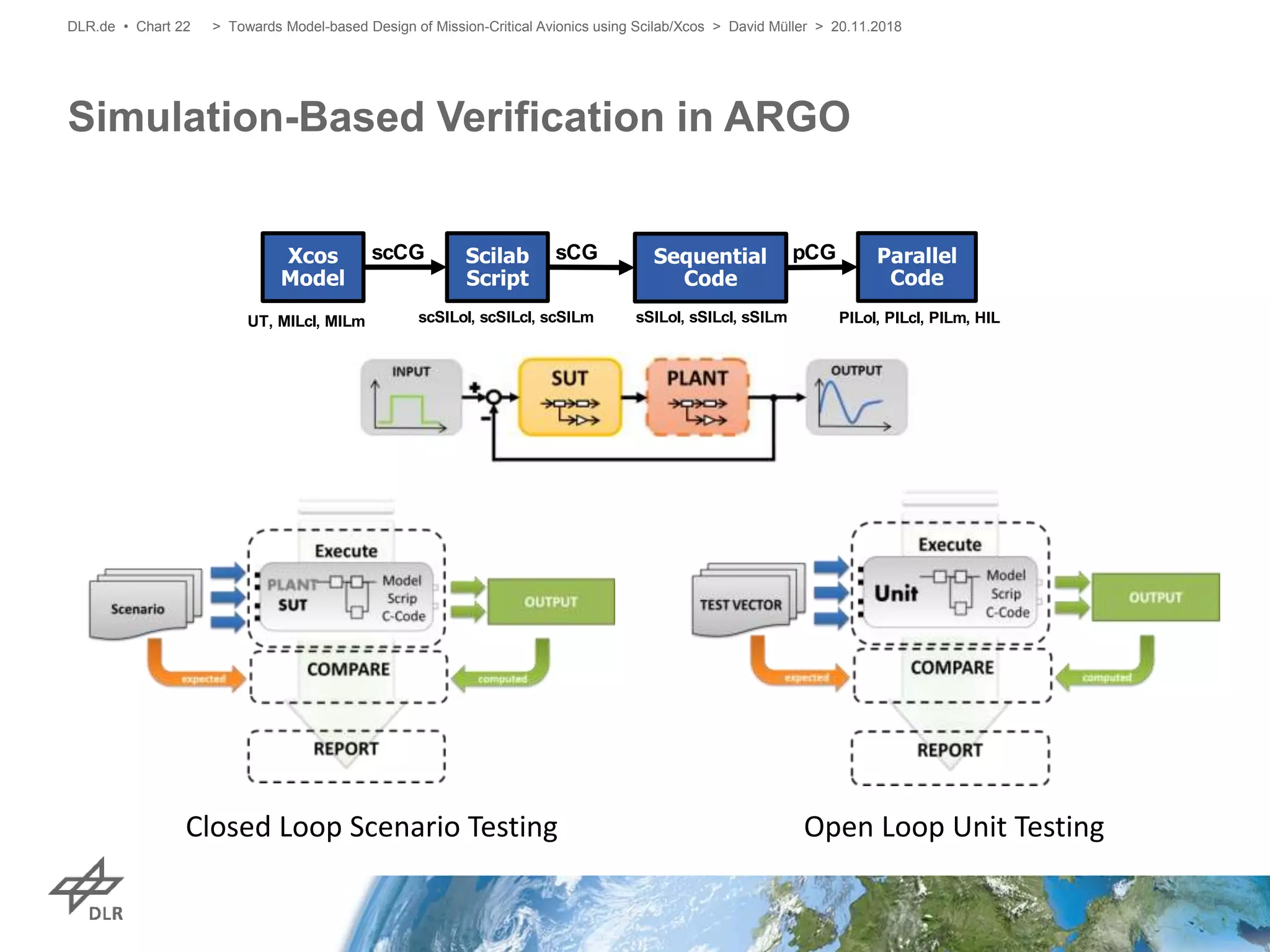
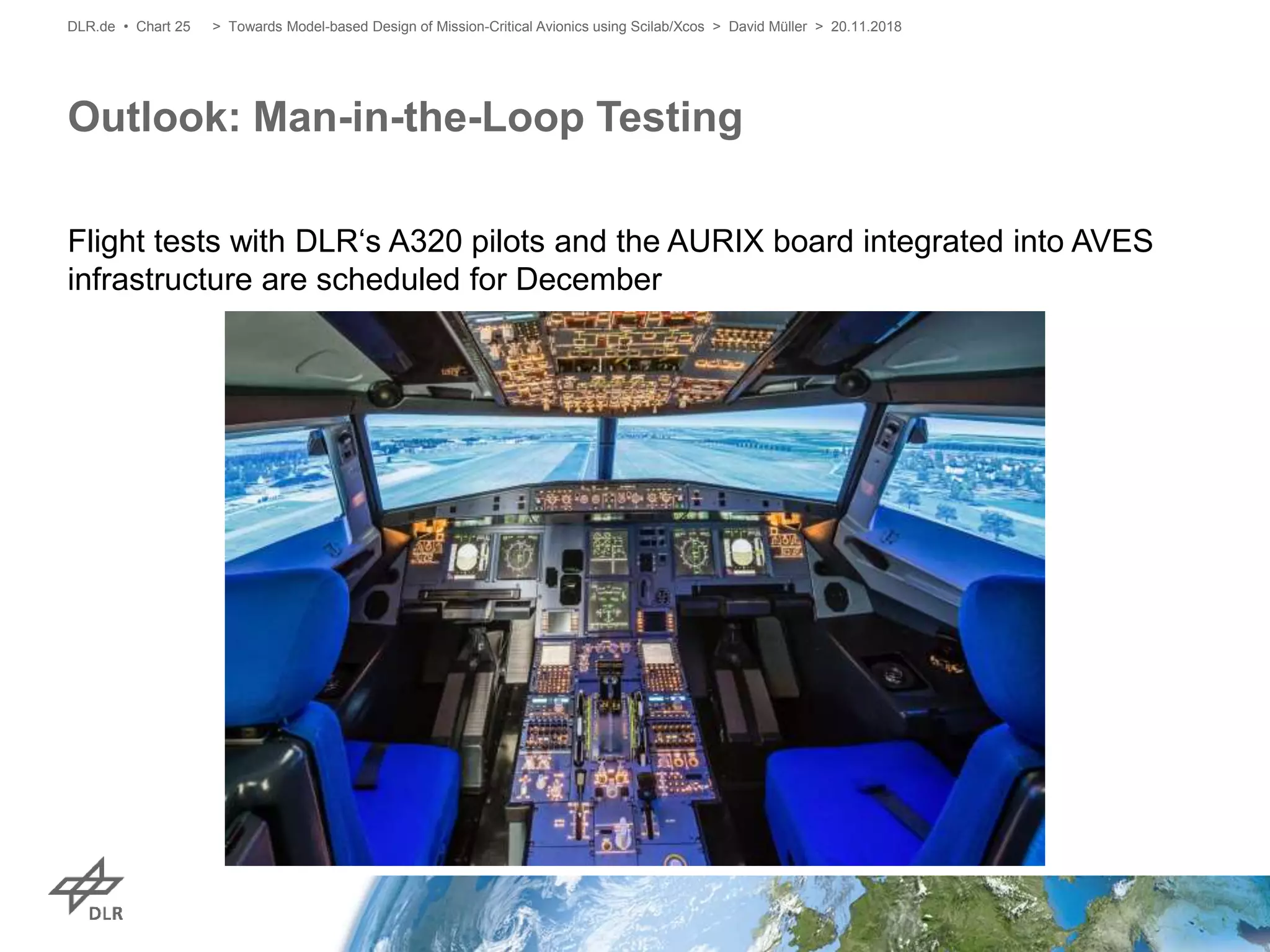

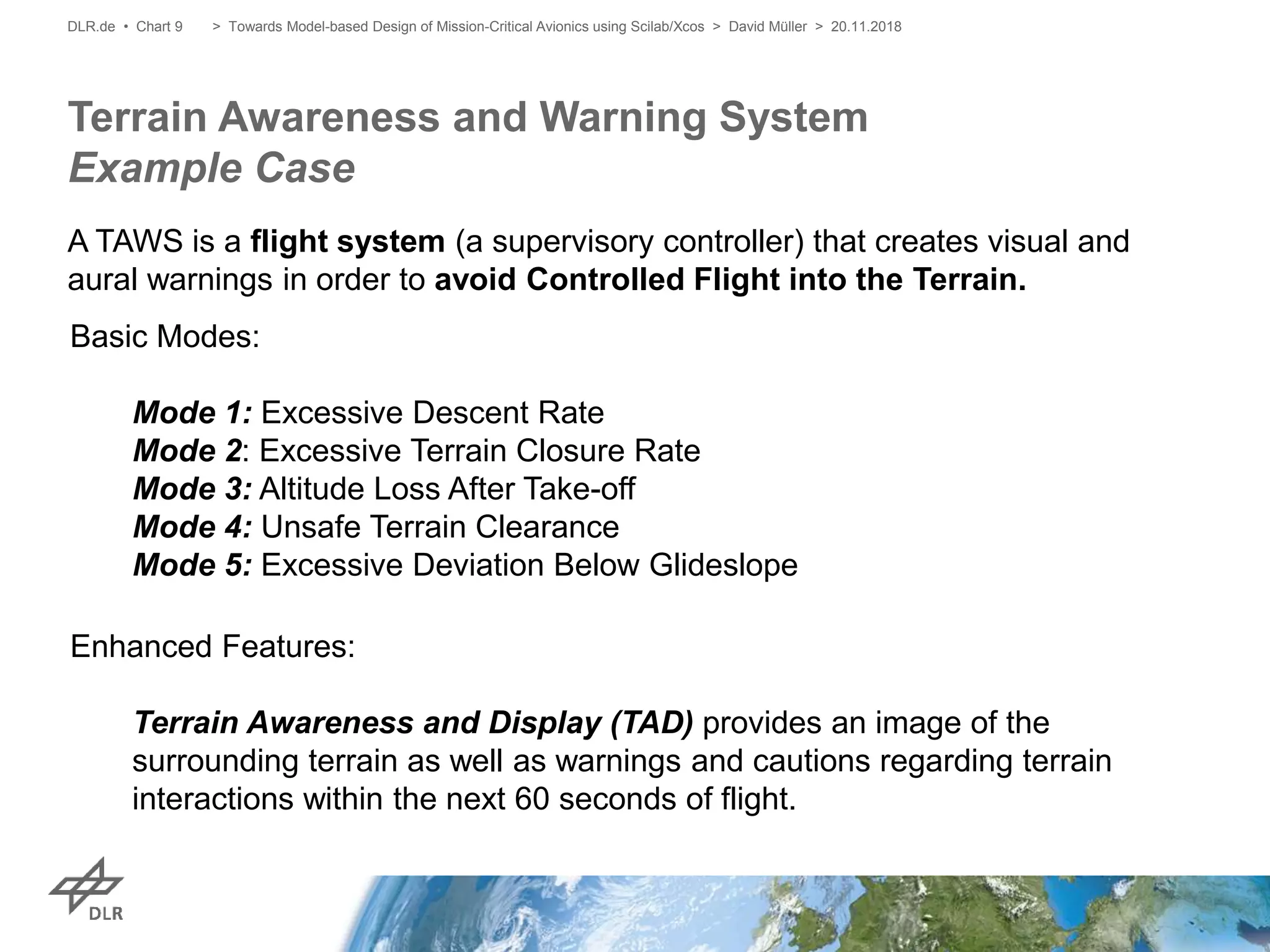
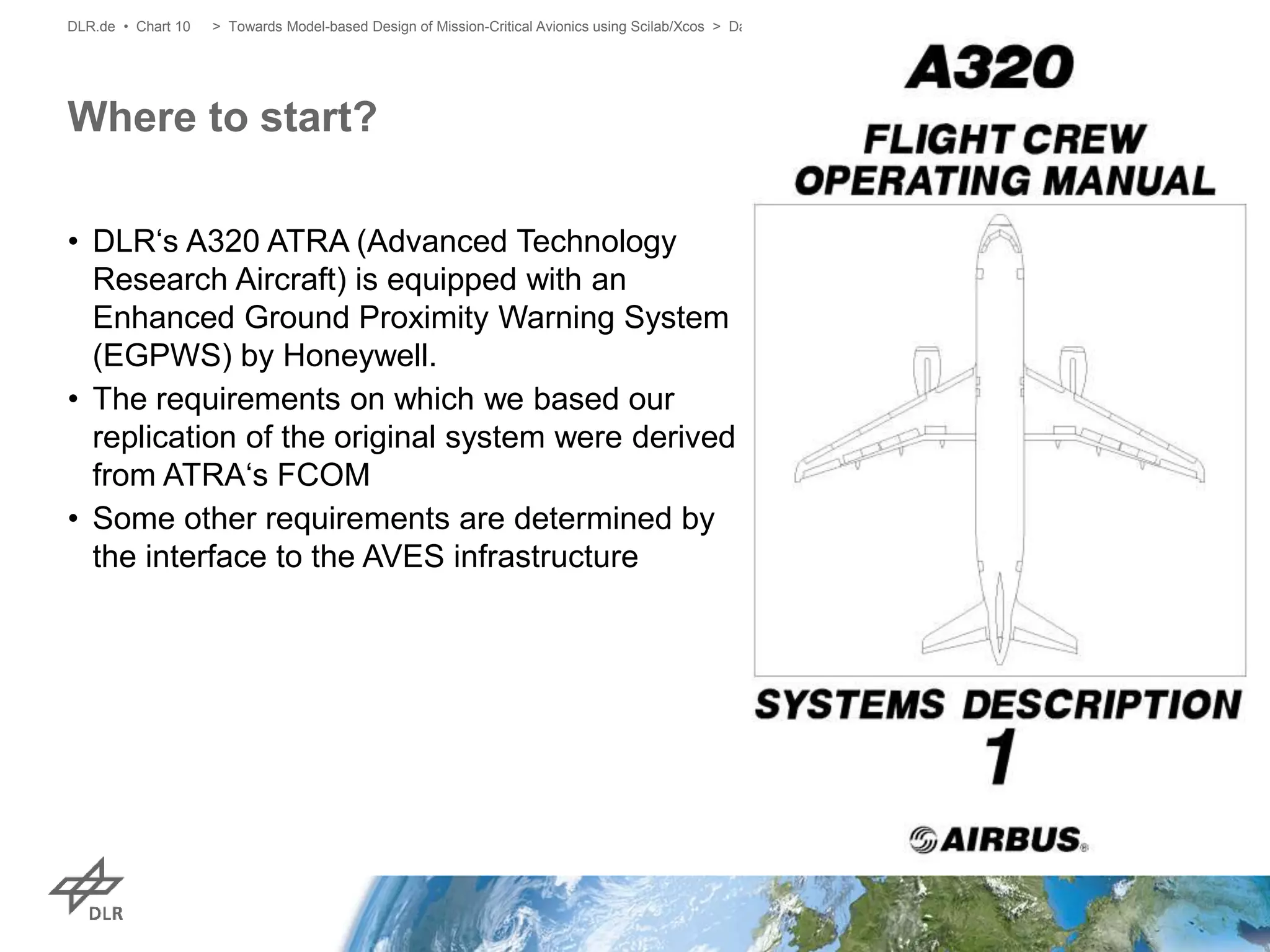
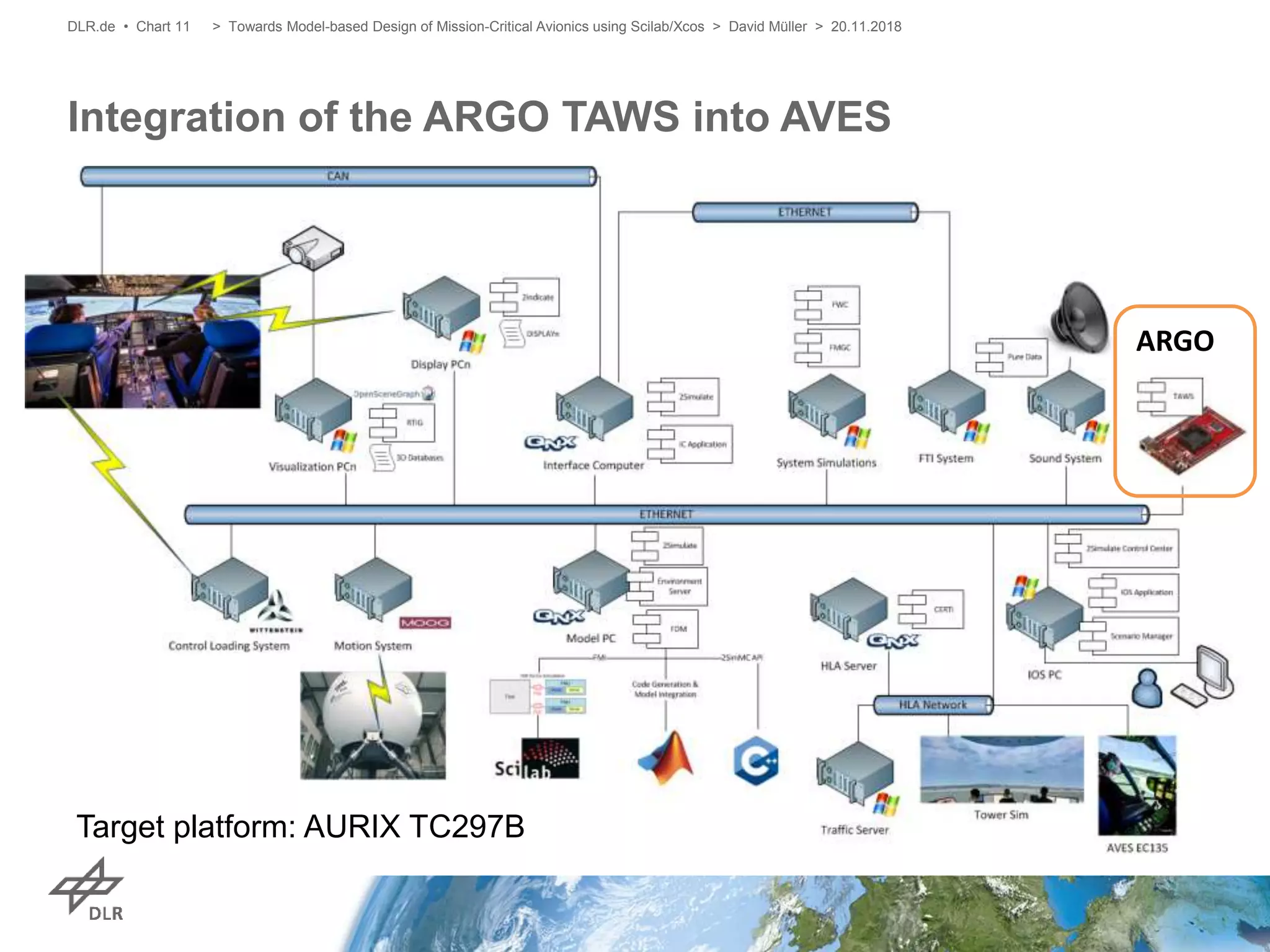
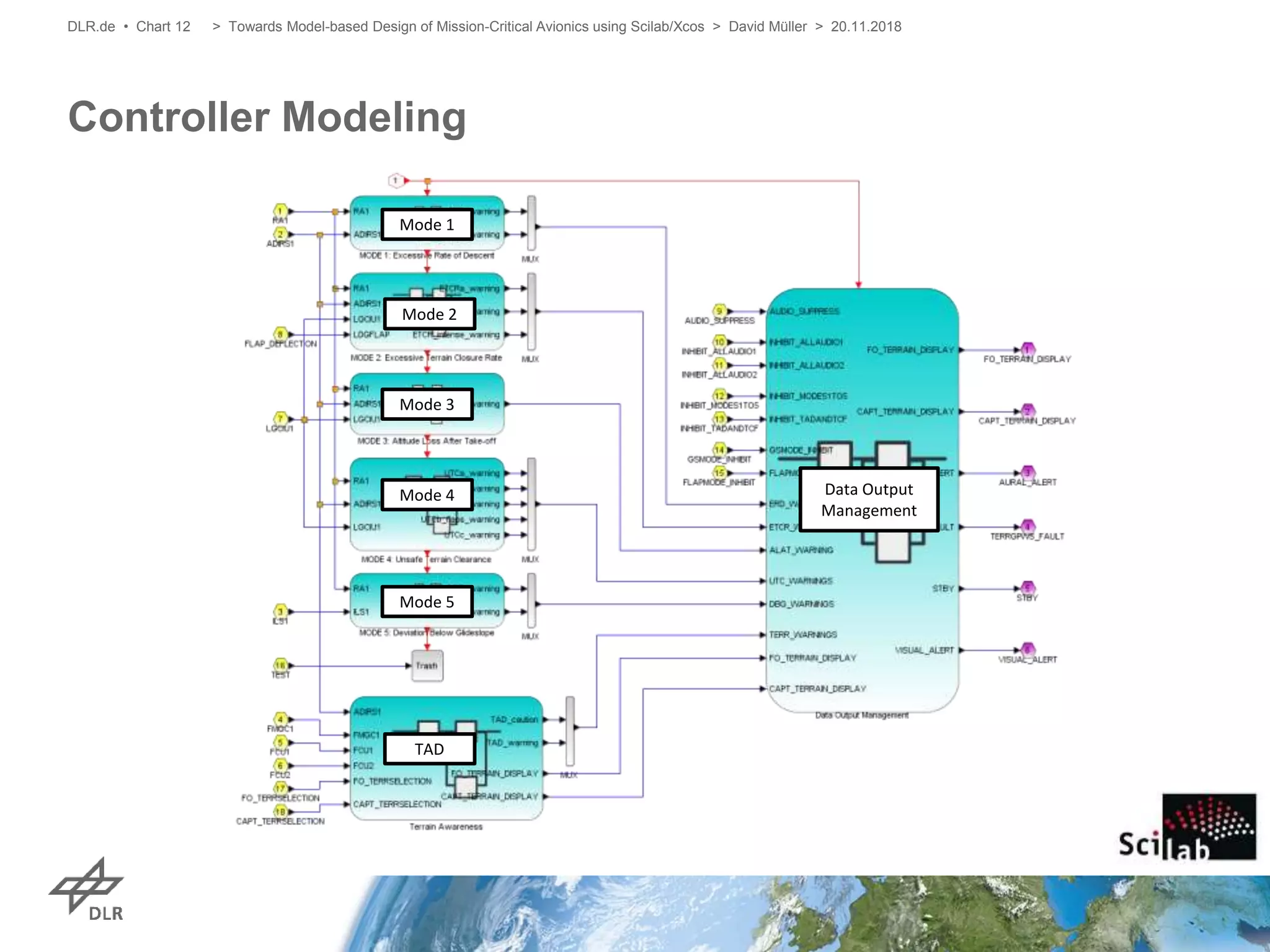
This document discusses model-based design of mission-critical avionics using Scilab/Xcos. It describes the ARGO project, which aims to help software developers better utilize multiprocessor hardware platforms. As a case study, the document details modeling a Terrain Awareness and Warning System for DLR's A320 simulator using Scilab/Xcos blocks. It discusses modeling the system controller, plant, and performing X-in-the-loop testing of the model. Future work includes integrating the system onto an AURIX multicore board and testing it with pilots in DLR's simulator.










































![Hugo Teso - Profundizando en la seguridad de la aviación [Rooted CON 2014]](https://cdn.slidesharecdn.com/ss_thumbnails/hugoteso-commandercat-140424135026-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)