Downloaded 160 times
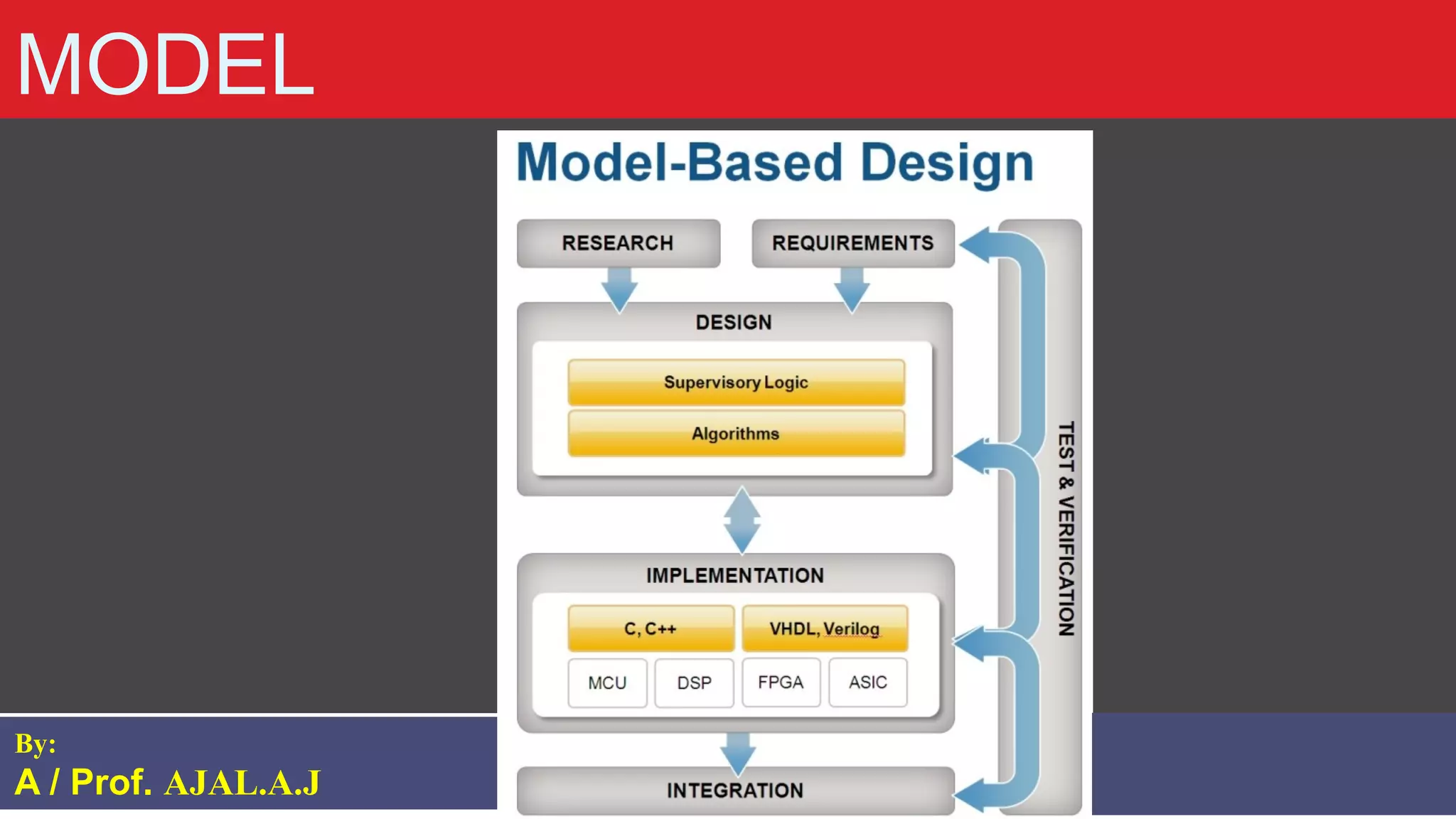
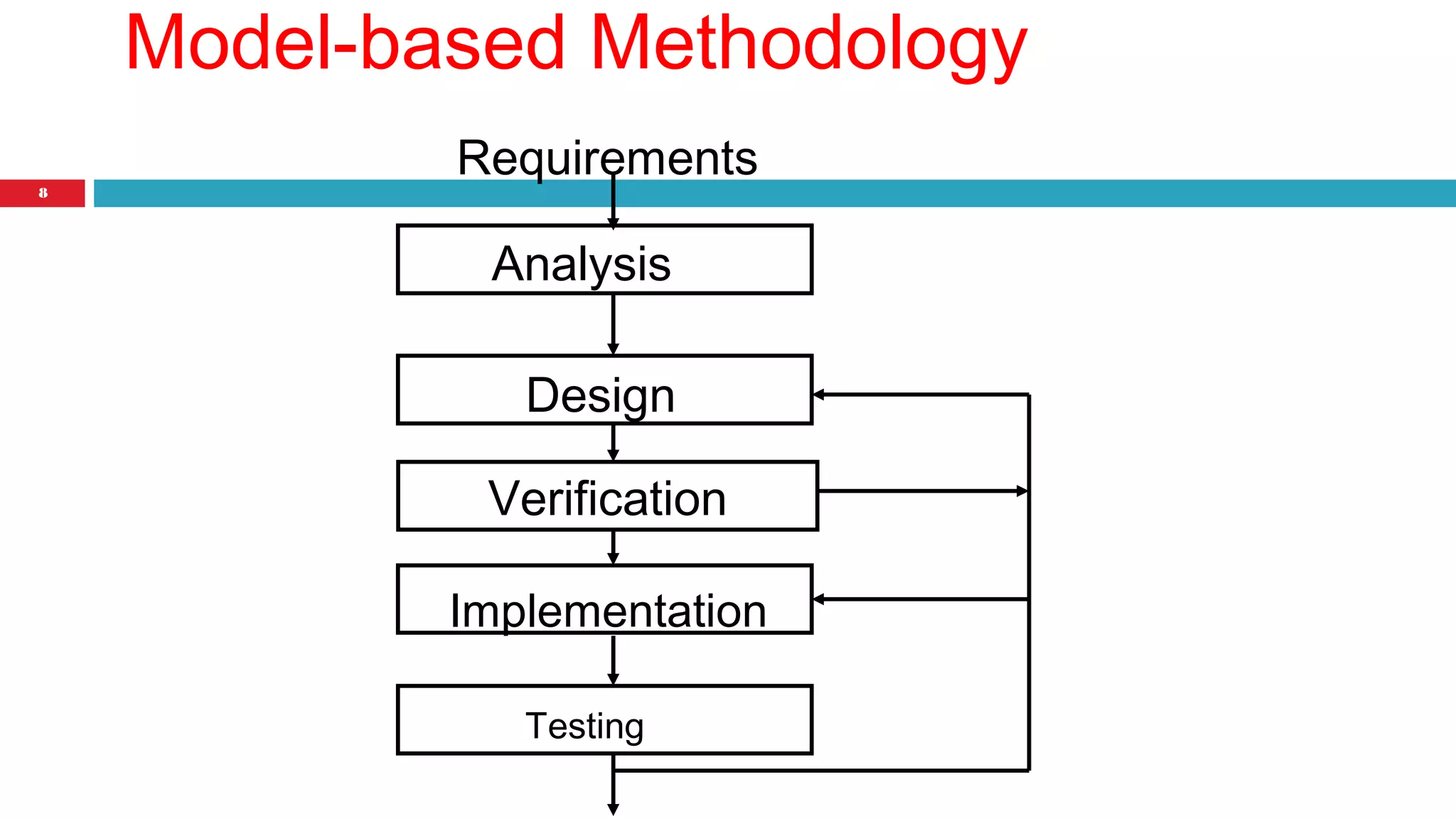
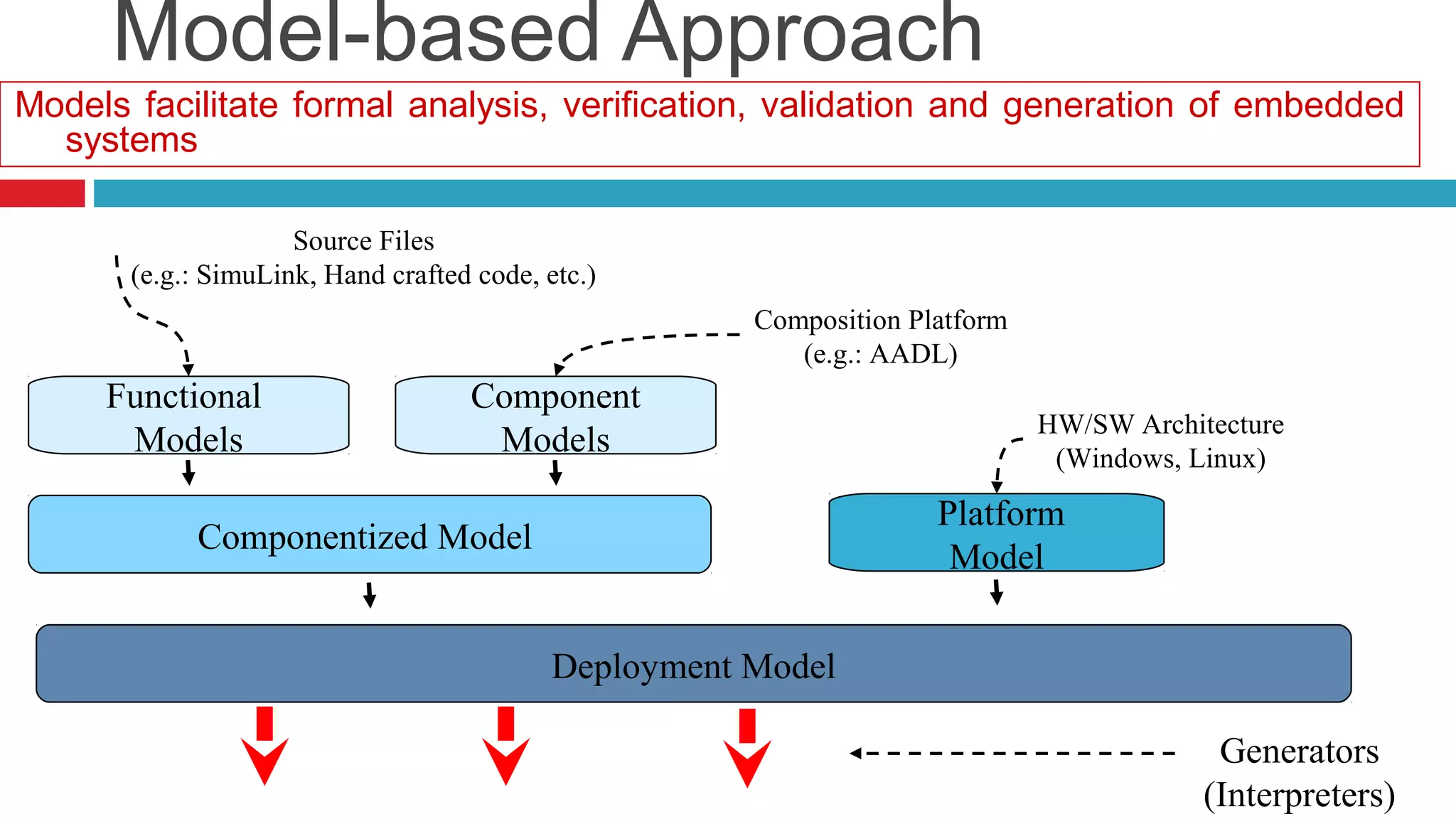
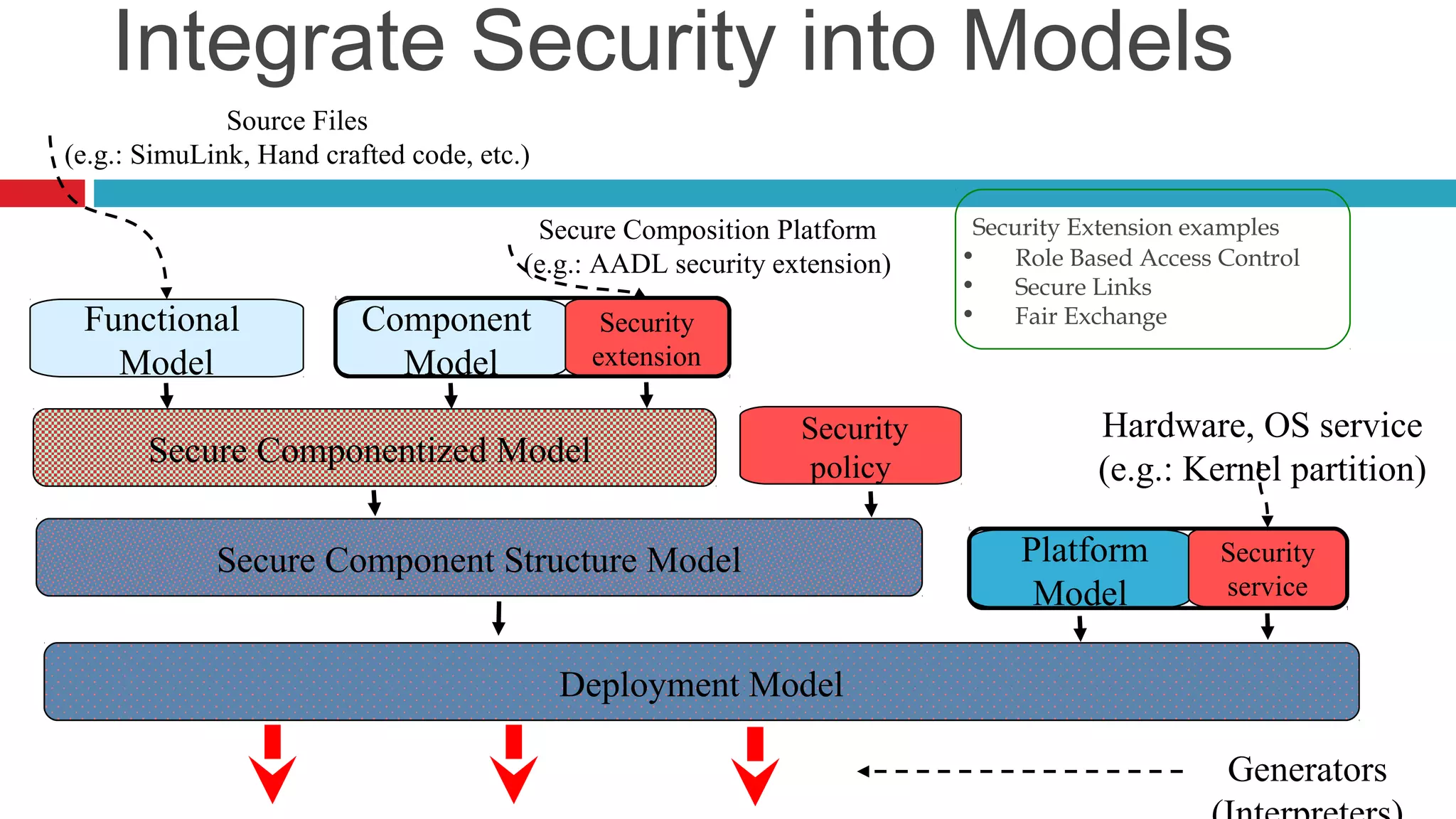

The document discusses the complexities and development challenges of embedded systems, highlighting the need for model-based methodologies such as formal modeling and verification. It outlines various modeling languages and frameworks suited for different types of systems, including control-dominated and data-dominated designs. The key takeaway is the importance of using models to facilitate analysis, validation, and the generation of effective embedded systems solutions.