Downloaded 363 times
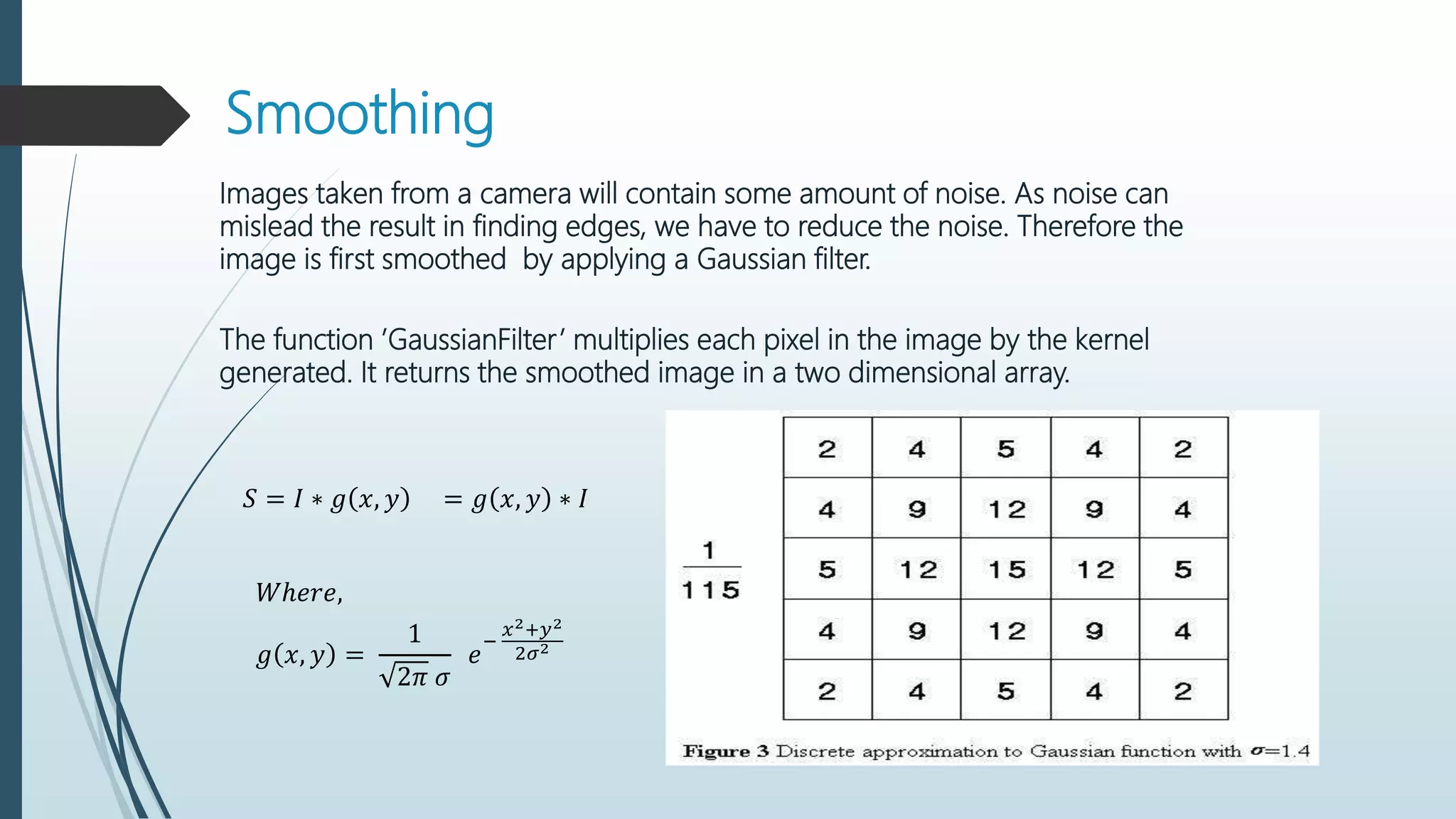
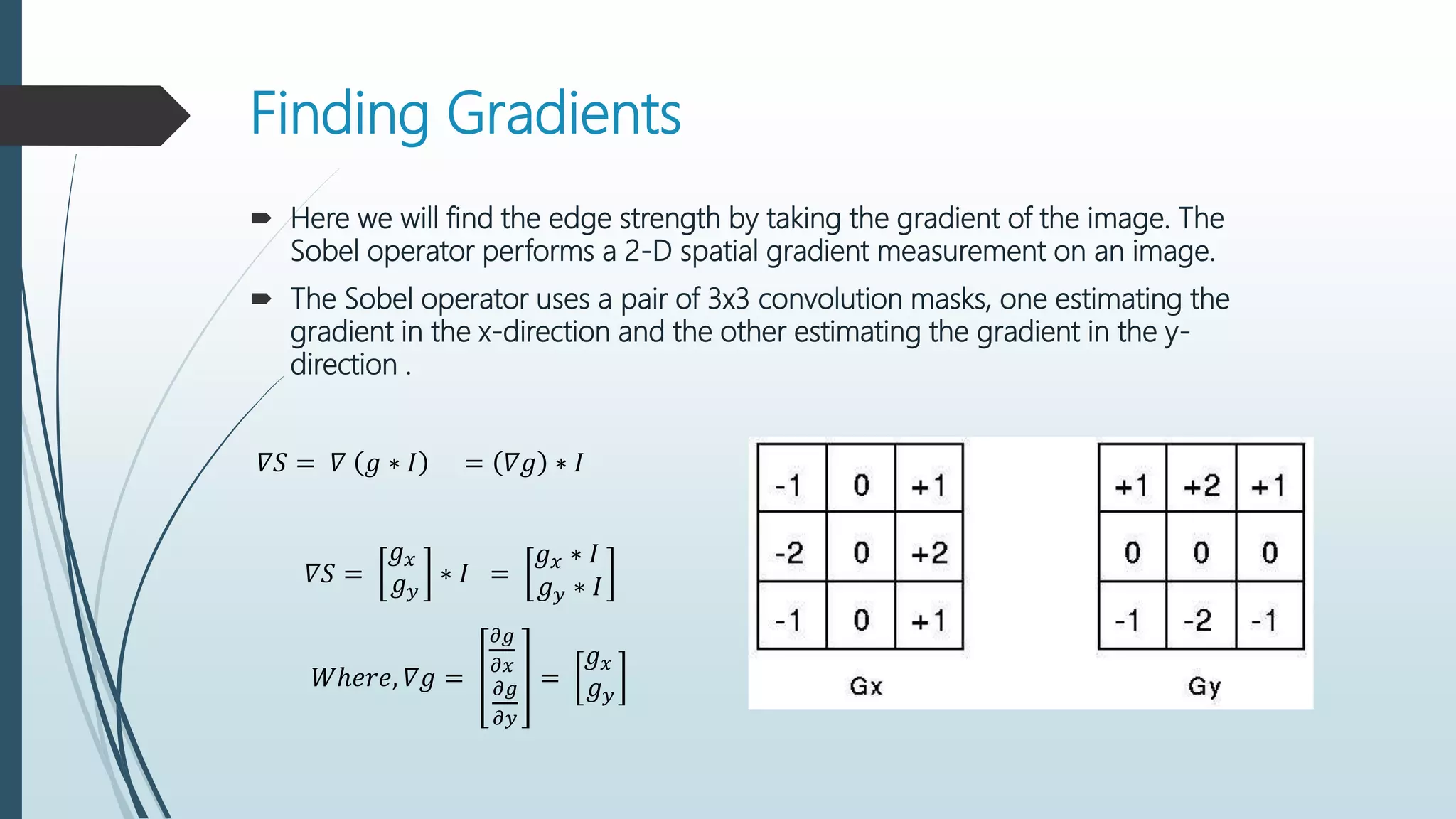
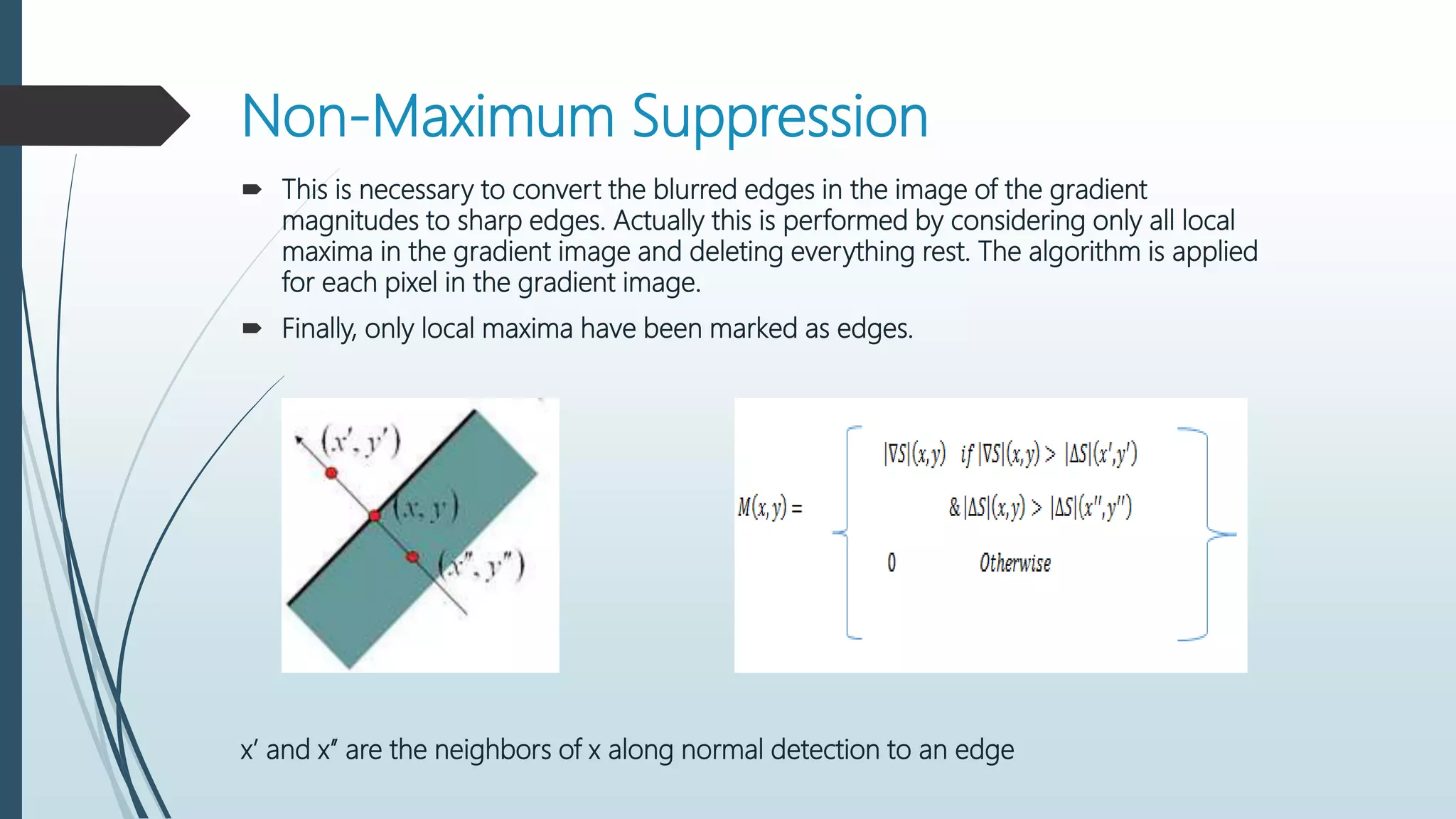
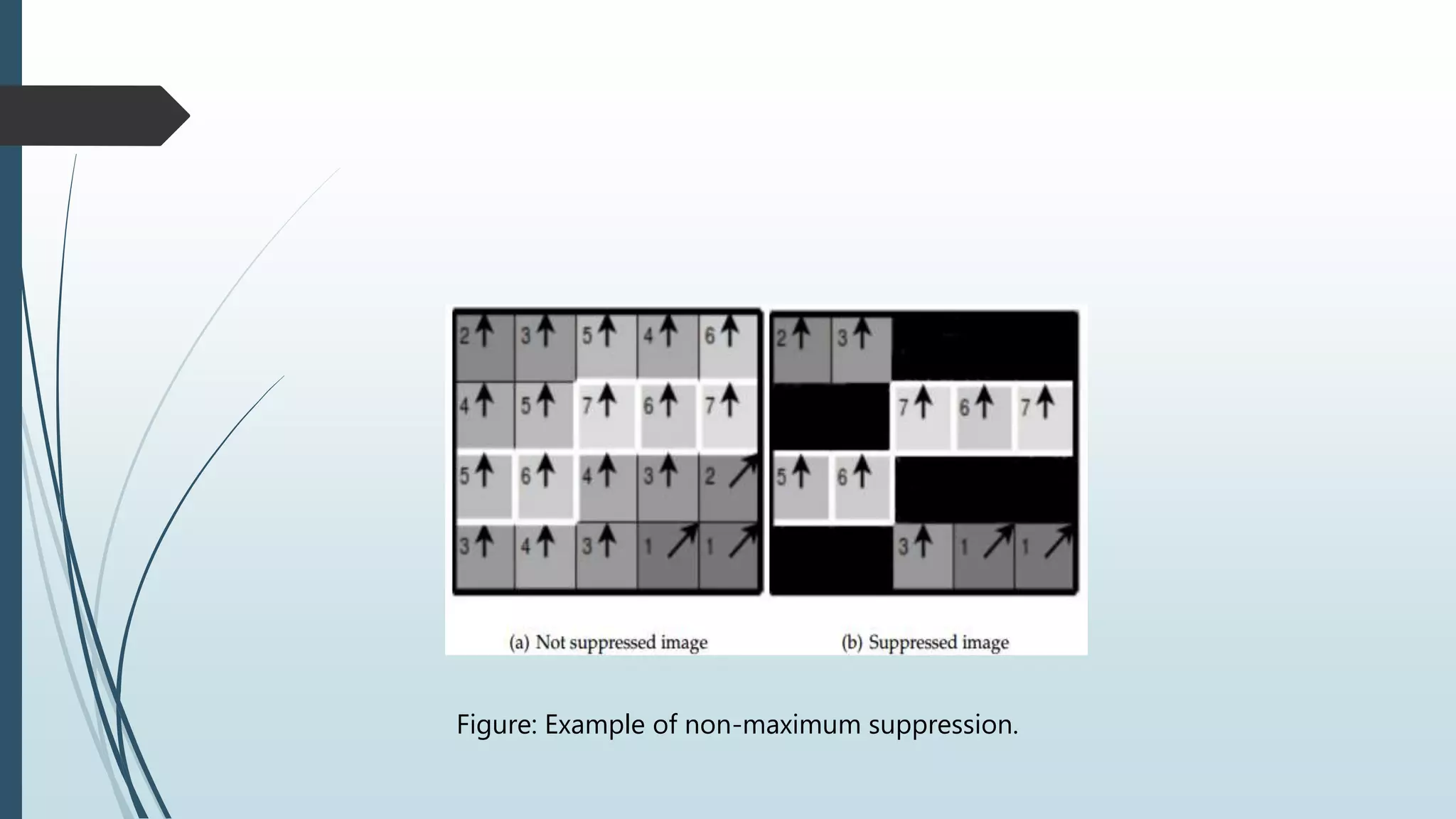
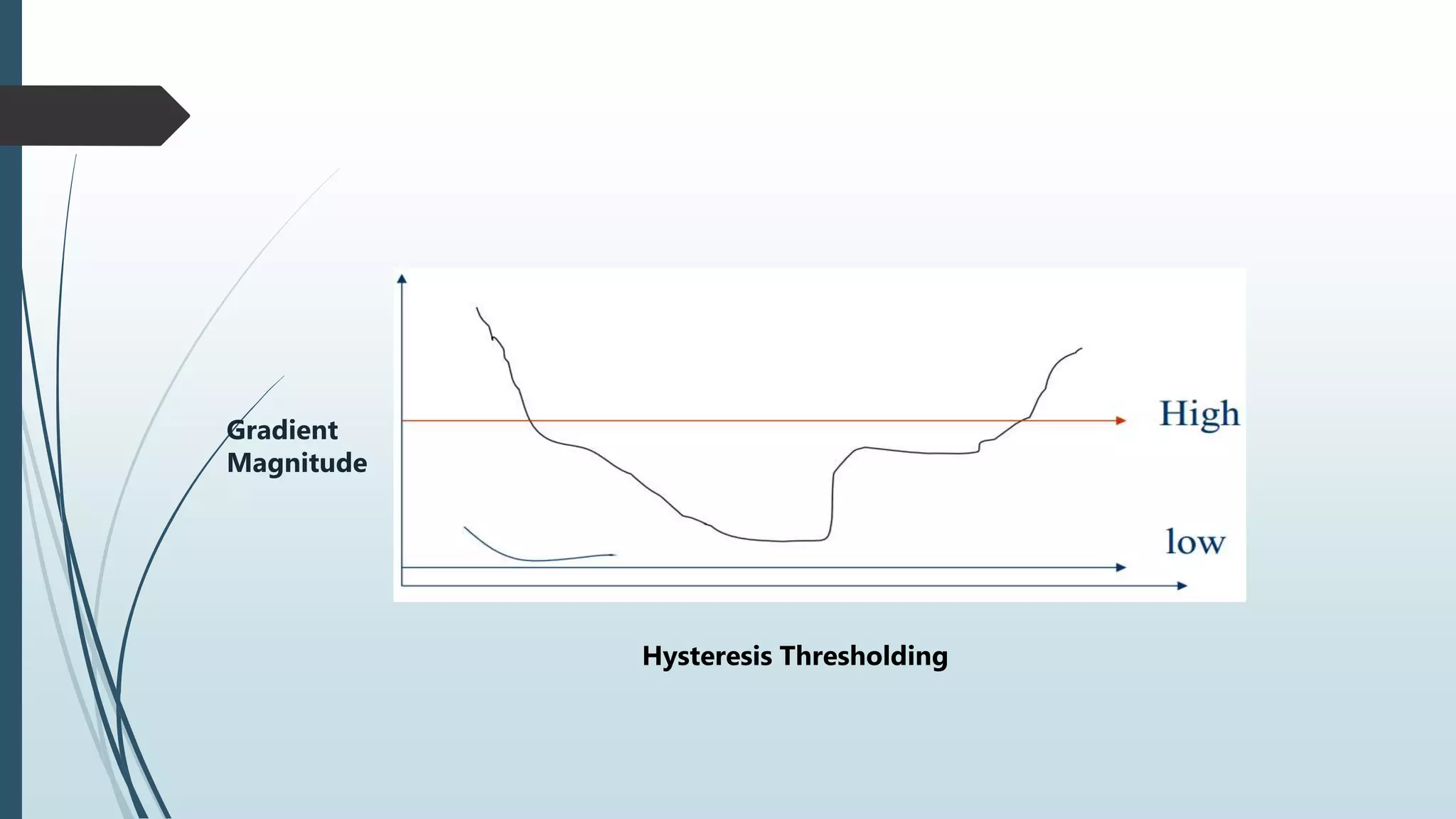


Sree Narayan Chakraborty presented on the Canny edge detection algorithm. The algorithm aims to detect edges with high signal-to-noise ratio while minimizing false detections. It involves smoothing the image, finding gradients, non-maximum suppression to detect local maxima, and hysteresis thresholding to determine real edges. The performance of Canny edge detection depends on adjustable parameters like the Gaussian filter's standard deviation and threshold values, which can be tailored for different environments.