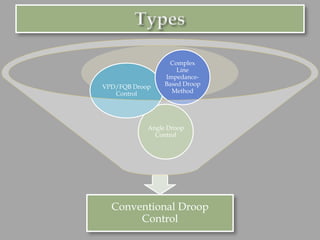
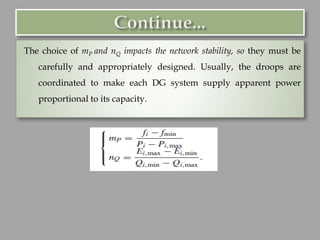
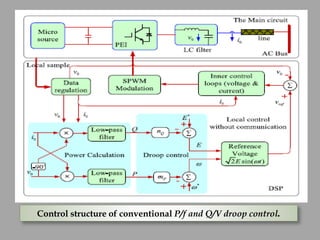
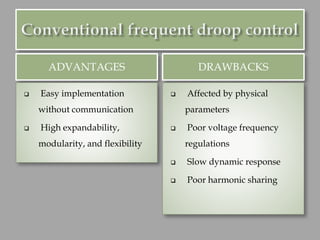
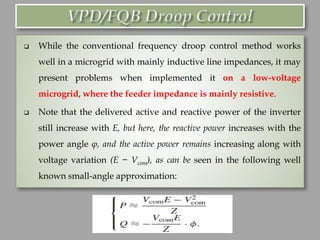
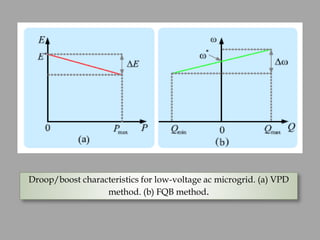
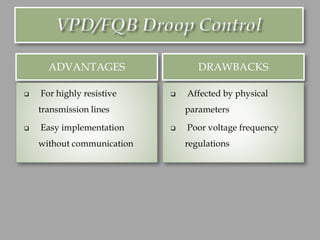
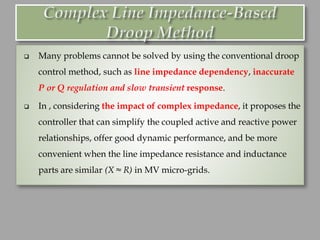
This document discusses various control strategies for power sharing in AC microgrids, including droop control approaches. It provides details on several types of droop control methods and their advantages and drawbacks. Specifically, it describes conventional droop control based on frequency-power (P/f) and voltage-reactive power (Q/V) drooping characteristics. It also discusses voltage-power droop and frequency-reactive power boosting control for microgrids with resistive lines, as well as complex line impedance-based droop control methods.