Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Deep Learning JP
PDF, PPTX
1,493 views
[DL輪読会]Learning to Simulate Complex Physics with Graph Networks
2020/05/08 Deep Learning JP: http://deeplearning.jp/seminar-2/
Technology
◦
Related topics:
Deep Learning
•
Read more
2
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 23
2
/ 23
Most read
3
/ 23
Most read
4
/ 23
5
/ 23
6
/ 23
7
/ 23
8
/ 23
9
/ 23
10
/ 23
11
/ 23
Most read
12
/ 23
13
/ 23
14
/ 23
15
/ 23
16
/ 23
17
/ 23
18
/ 23
19
/ 23
20
/ 23
21
/ 23
22
/ 23
23
/ 23
More Related Content
PPTX
[DL輪読会]Focal Loss for Dense Object Detection
by
Deep Learning JP
PDF
点群深層学習 Meta-study
by
Naoya Chiba
PDF
グラフニューラルネットワーク入門
by
ryosuke-kojima
PPTX
【DL輪読会】時系列予測 Transfomers の精度向上手法
by
Deep Learning JP
PDF
最新リリース:Optuna V3の全て - 2022/12/10 Optuna Meetup #2
by
Preferred Networks
PPTX
Tensor コアを使った PyTorch の高速化
by
Yusuke Fujimoto
PPTX
【論文紹介】How Powerful are Graph Neural Networks?
by
Masanao Ochi
PDF
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
[DL輪読会]Focal Loss for Dense Object Detection
by
Deep Learning JP
点群深層学習 Meta-study
by
Naoya Chiba
グラフニューラルネットワーク入門
by
ryosuke-kojima
【DL輪読会】時系列予測 Transfomers の精度向上手法
by
Deep Learning JP
最新リリース:Optuna V3の全て - 2022/12/10 Optuna Meetup #2
by
Preferred Networks
Tensor コアを使った PyTorch の高速化
by
Yusuke Fujimoto
【論文紹介】How Powerful are Graph Neural Networks?
by
Masanao Ochi
SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜
by
SSII
What's hot
PPTX
畳み込みニューラルネットワークの高精度化と高速化
by
Yusuke Uchida
PDF
【DL輪読会】Diffusion Policy: Visuomotor Policy Learning via Action Diffusion
by
Deep Learning JP
PPTX
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
by
SSII
PDF
[DL輪読会]Relational inductive biases, deep learning, and graph networks
by
Deep Learning JP
PDF
[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling
by
Deep Learning JP
PPTX
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
by
Shota Imai
PPTX
Graph Neural Networks
by
tm1966
PDF
最適輸送の計算アルゴリズムの研究動向
by
ohken
PDF
【DL輪読会】“PanopticDepth: A Unified Framework for Depth-aware Panoptic Segmenta...
by
Deep Learning JP
PDF
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
PDF
最適輸送入門
by
joisino
PPTX
【DL輪読会】DiffRF: Rendering-guided 3D Radiance Field Diffusion [N. Muller+ CVPR2...
by
Deep Learning JP
PDF
[DL輪読会]ICLR2020の分布外検知速報
by
Deep Learning JP
PDF
【メタサーベイ】Transformerから基盤モデルまでの流れ / From Transformer to Foundation Models
by
cvpaper. challenge
PDF
Domain Adaptation 発展と動向まとめ(サーベイ資料)
by
Yamato OKAMOTO
PPTX
Transformerを雰囲気で理解する
by
AtsukiYamaguchi1
PDF
PyData.Tokyo Meetup #21 講演資料「Optuna ハイパーパラメータ最適化フレームワーク」太田 健
by
Preferred Networks
PPTX
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
PDF
TensorFlowで逆強化学習
by
Mitsuhisa Ohta
PDF
CV分野におけるサーベイ方法
by
Hirokatsu Kataoka
畳み込みニューラルネットワークの高精度化と高速化
by
Yusuke Uchida
【DL輪読会】Diffusion Policy: Visuomotor Policy Learning via Action Diffusion
by
Deep Learning JP
SSII2020SS: グラフデータでも深層学習 〜 Graph Neural Networks 入門 〜
by
SSII
[DL輪読会]Relational inductive biases, deep learning, and graph networks
by
Deep Learning JP
[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling
by
Deep Learning JP
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
by
Shota Imai
Graph Neural Networks
by
tm1966
最適輸送の計算アルゴリズムの研究動向
by
ohken
【DL輪読会】“PanopticDepth: A Unified Framework for Depth-aware Panoptic Segmenta...
by
Deep Learning JP
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
最適輸送入門
by
joisino
【DL輪読会】DiffRF: Rendering-guided 3D Radiance Field Diffusion [N. Muller+ CVPR2...
by
Deep Learning JP
[DL輪読会]ICLR2020の分布外検知速報
by
Deep Learning JP
【メタサーベイ】Transformerから基盤モデルまでの流れ / From Transformer to Foundation Models
by
cvpaper. challenge
Domain Adaptation 発展と動向まとめ(サーベイ資料)
by
Yamato OKAMOTO
Transformerを雰囲気で理解する
by
AtsukiYamaguchi1
PyData.Tokyo Meetup #21 講演資料「Optuna ハイパーパラメータ最適化フレームワーク」太田 健
by
Preferred Networks
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
TensorFlowで逆強化学習
by
Mitsuhisa Ohta
CV分野におけるサーベイ方法
by
Hirokatsu Kataoka
Similar to [DL輪読会]Learning to Simulate Complex Physics with Graph Networks
PDF
グラフニューラルネットワークとグラフ組合せ問題
by
joisino
PDF
PFP:材料探索のための汎用Neural Network Potential_中郷_20220422POLセミナー
by
Matlantis
PDF
Deep learningの発展と化学反応への応用 - 日本化学会第101春季大会(2021)
by
Preferred Networks
PDF
深層学習(岡本孝之 著) - Deep Learning chap.1 and 2
by
Masayoshi Kondo
PPTX
[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...
by
Deep Learning JP
PDF
Recurrent Neural Networks
by
Seiya Tokui
PDF
HPC+AI ってよく聞くけど結局なんなの
by
NVIDIA Japan
PDF
効率的学習 / Efficient Training(メタサーベイ)
by
cvpaper. challenge
PDF
Deep learning実装の基礎と実践
by
Seiya Tokui
PPT
Deep Learningの技術と未来
by
Seiya Tokui
PDF
Seeing Unseens with Machine Learning -- 見えていないものを見出す機械学習
by
Tatsuya Shirakawa
PDF
2015年9月18日 (GTC Japan 2015) 深層学習フレームワークChainerの導入と化合物活性予測への応用
by
Kenta Oono
PDF
Chainerの使い方と自然言語処理への応用
by
Seiya Tokui
PPTX
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
PDF
Deep learning Libs @twm
by
Yuta Kashino
PDF
20220125_neurips_sharing_vqgnn
by
ssuser9156f1
PDF
LCCC2010:Learning on Cores, Clusters and Cloudsの解説
by
Preferred Networks
PDF
Introduction to Chainer (LL Ring Recursive)
by
Kenta Oono
PDF
Deep Learningの基礎と応用
by
Seiya Tokui
PDF
[AI08] 深層学習フレームワーク Chainer × Microsoft で広がる応用
by
de:code 2017
グラフニューラルネットワークとグラフ組合せ問題
by
joisino
PFP:材料探索のための汎用Neural Network Potential_中郷_20220422POLセミナー
by
Matlantis
Deep learningの発展と化学反応への応用 - 日本化学会第101春季大会(2021)
by
Preferred Networks
深層学習(岡本孝之 著) - Deep Learning chap.1 and 2
by
Masayoshi Kondo
[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...
by
Deep Learning JP
Recurrent Neural Networks
by
Seiya Tokui
HPC+AI ってよく聞くけど結局なんなの
by
NVIDIA Japan
効率的学習 / Efficient Training(メタサーベイ)
by
cvpaper. challenge
Deep learning実装の基礎と実践
by
Seiya Tokui
Deep Learningの技術と未来
by
Seiya Tokui
Seeing Unseens with Machine Learning -- 見えていないものを見出す機械学習
by
Tatsuya Shirakawa
2015年9月18日 (GTC Japan 2015) 深層学習フレームワークChainerの導入と化合物活性予測への応用
by
Kenta Oono
Chainerの使い方と自然言語処理への応用
by
Seiya Tokui
Image net classification with Deep Convolutional Neural Networks
by
Shingo Horiuchi
Deep learning Libs @twm
by
Yuta Kashino
20220125_neurips_sharing_vqgnn
by
ssuser9156f1
LCCC2010:Learning on Cores, Clusters and Cloudsの解説
by
Preferred Networks
Introduction to Chainer (LL Ring Recursive)
by
Kenta Oono
Deep Learningの基礎と応用
by
Seiya Tokui
[AI08] 深層学習フレームワーク Chainer × Microsoft で広がる応用
by
de:code 2017
More from Deep Learning JP
PPTX
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
PPTX
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
PDF
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
PDF
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
PDF
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
PPTX
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
PPTX
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
PPTX
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
PDF
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
PDF
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
PPTX
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
PPTX
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
PDF
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
PPTX
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
PPTX
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
PPTX
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
PPTX
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
PDF
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
PPTX
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
PPTX
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
Recently uploaded
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
[DL輪読会]Learning to Simulate Complex Physics with Graph Networks
1.
Learning to Simulate
Complex Physics with Graph Networks 進したい
2.
書誌情報 • "Submitted to
ICML 2020" • 著者:Peter W. Battaglia達(Deepmind + Stanford大) – Graph Netの強い方(Graph Netの提案者) • Twitterでバズってた
3.
概要 • 「剛体/液体/可変形体 +
それらの相互作用」のシミュレーションの、汎用的 な学習フレームワーク • 学習ベースではSoTA • めちゃくちゃ汎化する, 幅広い物体に使える – 予測ステップ数, 物体の量, 形。固体/液体/粘性/可変形。 • モチベーション – 古典的なシミュレータは高コスト(計算資源, 速度) – どれだけ頑張ってもわからない物理法則/物理パラメータがある – (将来的に)観測データから直で学んでほしい • ひとこと – trainableなパラメタが多くて賢い。"高次元科学"してる感じ。
4.
結果が映えてる https://sites.google.com/view/learni ng-to-simulate/home#h.p_ne1gyU G1RebB 青:液体,赤:粘性,茶色:砂 シンプルな学習データだけでいろいろできるように⇨
5.
アジェンダ 問題設定 手法 既存手法 実験
6.
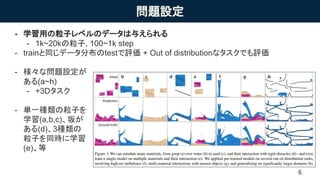
問題設定 - 学習用の粒子レベルのデータは与えられる - 1k~20kの粒子,
100~1k step - trainと同じデータ分布のtestで評価 + Out of distributionなタスクでも評価 - 様々な問題設定が ある(a~h) - +3Dタスク - 単一種類の粒子を 学習(a,b,c)、坂が ある(d)、3種類の 粒子を同時に学習 (e)、等
7.
Non-学習ベースの手法 - “smoothed particle
hydrodynamics” (SPH)(液体) - 自身と周りの粒子の密度で運動方程式を近似して、速度の変化を求める - (Monaghan, 1992) - “material point method” (MPM) (deformable) - (Sulsky et al., 1995) - 有限要素法に似てるらしい(?) - “position-based dynamics” (PBD) (deformable) - (Muller et al. ¨ , 2007) - 粒子同士が一定の距離を保つという拘束条件を 解くらしい(?)
8.
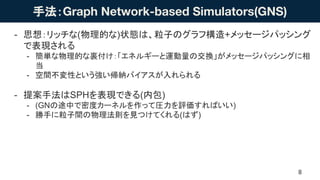
手法:Graph Network-based Simulators(GNS) -
思想:リッチな(物理的な)状態は、粒子のグラフ構造+メッセージパッシング で表現される - 簡単な物理的な裏付け:「エネルギーと運動量の交換」がメッセージパッシングに相 当 - 空間不変性という強い帰納バイアスが入れられる - 提案手法はSPHを表現できる(内包) - (GNの途中で密度カーネルを作って圧力を評価すればいい) - 勝手に粒子間の物理法則を見つけてくれる(はず)
9.
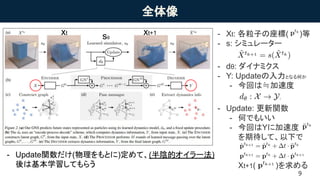
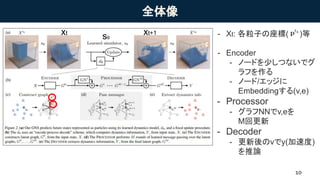
- Xt: 各粒子の座標(
)等 - s: シミュレーター - dθ: ダイナミクス - Y: Updateの入力となる何か - 今回は≒加速度 - Update: 更新関数 - 何でもいい - 今回はYに加速度 を期待して、以下で Xt+1( )を求める 全体像 sθ xt xt+1 - Update関数だけ(物理をもとに)定めて、(半陰的オイラー法) 後は基本学習してもらう
10.
- Xt: 各粒子の座標(
)等 - Encoder - ノードを少しつないでグ ラフを作る - ノード/エッジに Embeddingする(v,e) - Processor - グラフNNでv,eを M回更新 - Decoder - 更新後のvでy(加速度) を推論 全体像 sθ xt xt+1
11.
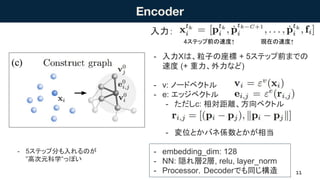
Encoder 入力: - 入力Xは、粒子の座標 +
5ステップ前までの 速度 (+ 重力、外力など) - v: ノードベクトル - e: エッジベクトル - ただしc: 相対距離、方向ベクトル - 変位とかバネ係数とかが相当 - embedding_dim: 128 - NN: 隠れ層2層, relu, layer_norm - Processor,Decoderでも同じ構造 4ステップ前の速度↑ 現在の速度↑ - 5ステップ分も入れるのが ”高次元科学”っぽい
12.
Processor - vの更新 - eの更新(eは有向) -
入力はすべてconcatしてMLP - Mステップの更新で、毎回別のパラメ タのGNを使う(unshared) [DL輪読会]Relational inductive biases, deep learning, and graph networks GN(Graph Net) 昔の中川さんの輪読で登場
13.
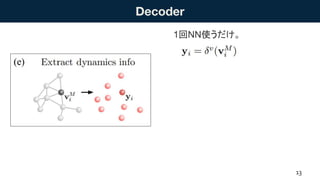
Decoder 1回NN使うだけ。
14.
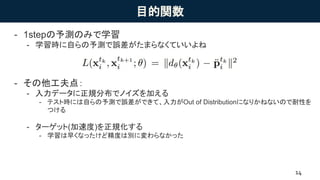
目的関数 - 1stepの予測のみで学習 - 学習時に自らの予測で誤差がたまらなくていいよね -
その他工夫点: - 入力データに正規分布でノイズを加える - テスト時には自らの予測で誤差ができて、入力がOut of Distributionになりかねないので耐性を つける - ターゲット(加速度)を正規化する - 学習は早くなったけど精度は別に変わらなかった
15.
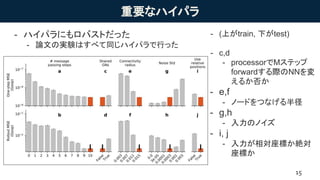
重要なハイパラ - ハイパラにもロバストだった - 論文の実験はすべて同じハイパラで行った -
(上がtrain, 下がtest) - c,d - processorでMステップ forwardする際のNNを変 えるか否か - e,f - ノードをつなげる半径 - g,h - 入力のノイズ - i, j - 入力が相対座標か絶対 座標か
16.
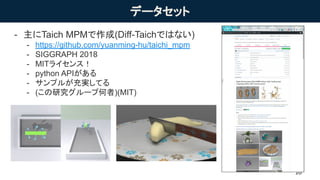
データセット - 主にTaich MPMで作成(Diff-Taichではない) -
https://github.com/yuanming-hu/taichi_mpm - SIGGRAPH 2018 - MITライセンス! - python APIがある - サンプルが充実してる - (この研究グループ何者)(MIT)
17.
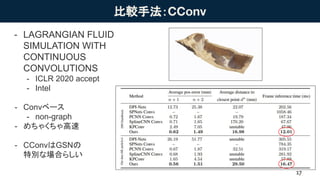
比較手法:CConv - LAGRANGIAN FLUID SIMULATION
WITH CONTINUOUS CONVOLUTIONS - ICLR 2020 accept - Intel - Convベース - non-graph - めちゃくちゃ高速 - CConvはGSNの 特別な場合らしい
18.
比較手法:CConv - LAGRANGIAN FLUID SIMULATION
WITH CONTINUOUS CONVOLUTIONS - 3つに分けてembedding - 外壁 - 周囲の粒子 - 注目してる粒子 - 特殊なカーネルで2Dマップを作る - △1ステップ前の状態だけで決めてる - △流体/一種類の予測に特化
19.
比較手法:DPI - Learning Particle
Dynamics for Manipulating Rigid Bodies, Deformable Objects, and Fluids - ICLR 2019 accept - Tenenbaumさん、MIT - 実機応用もしてる(おにぎりをこねる) - 画像から点群を推論し、目的の形になるように適 切な把持方向を探索してrollout
20.
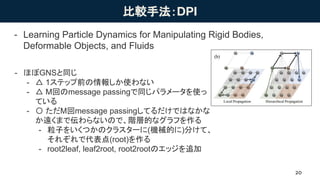
- Learning Particle
Dynamics for Manipulating Rigid Bodies, Deformable Objects, and Fluids 比較手法:DPI - ほぼGNSと同じ - △ 1ステップ前の情報しか使わない - △ M回のmessage passingで同じパラメータを使っ ている - 〇 ただM回message passingしてるだけではなかな か遠くまで伝わらないので、階層的なグラフを作る - 粒子をいくつかのクラスターに(機械的に)分けて、 それぞれで代表点(root)を作る - root2leaf, leaf2root, root2rootのエッジを追加
21.
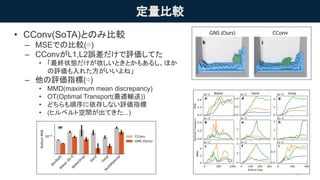
定量比較 • CConv(SoTA)とのみ比較 – MSEでの比較(⇩) –
CConvがL1,L2誤差だけで評価してた • 「最終状態だけが欲しいときとかもあるし、ほか の評価も入れた方がいいよね」 – 他の評価指標(⇨) • MMD(maximum mean discrepancy) • OT(Optimal Transport(最適輸送)) • どちらも順序に依存しない評価指標 • (ヒルベルト空間が出てきた...)
22.
うまくいかなかったケース - 長期の予測で剛体の方が崩れる - オリジナルの形を記憶し続けるのが難しい -
剛体は変形しないという(特殊な)制約を入れてい ない - へばりついて滑り落ちないことがある - 悪いシード - へばりつくのはtrainデータでは珍しいの現象なの で、もっとデータを与える必要がある
23.
まとめ • 広く使える粒子ベースの学習フレームワークを提案した – 空間不変性という強い制約
+ trainableパラメータを広く配置 • 入力(5ステップ)、エッジ、グローバル、non-shared パラメタ(message-passing時) • 将来的に未来予測、因果推論に使える
Download





![Processor
- vの更新
- eの更新(eは有向)
- 入力はすべてconcatしてMLP
- Mステップの更新で、毎回別のパラメ
タのGNを使う(unshared)
[DL輪読会]Relational inductive biases, deep
learning, and graph networks
GN(Graph Net) 昔の中川さんの輪読で登場](https://image.slidesharecdn.com/learningtosimulatecomplexphysicswithgraphnetworks-200508054213/85/DL-Learning-to-Simulate-Complex-Physics-with-Graph-Networks-12-320.jpg)




![[DL輪読会]Focal Loss for Dense Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/focalloss-180208092846-thumbnail.jpg?width=640&height=640&fit=bounds)






![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Relational inductive biases, deep learning, and graph networks](https://cdn.slidesharecdn.com/ss_thumbnails/180629dlseminarrelationalinductivebias-180706003755-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling](https://cdn.slidesharecdn.com/ss_thumbnails/decisiontransformer20210709zhangxin-210709021501-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]ICLR2020の分布外検知速報](https://cdn.slidesharecdn.com/ss_thumbnails/iclr2020ood-190927011524-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...](https://cdn.slidesharecdn.com/ss_thumbnails/20190426akuzawa-190426020057-thumbnail.jpg?width=640&height=640&fit=bounds)














![[AI08] 深層学習フレームワーク Chainer × Microsoft で広がる応用](https://cdn.slidesharecdn.com/ss_thumbnails/ai08-170705031536-thumbnail.jpg?width=640&height=640&fit=bounds)
































