This document provides an introduction to concepts in differential geometry including manifolds, tangent spaces, vector fields, differential forms, and operations on differential forms such as the exterior product and integration. It outlines key definitions and properties for differential geometry, Riemannian geometry, and applications to probability and statistics. The document is divided into three main sections on differential geometry, Riemannian geometry, and settings without Riemannian geometry.
![Element of differential geometry Riemannian geometry No Riemannian geometry
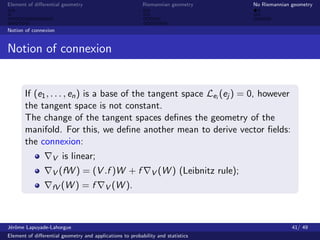
Operations on differential forms
Border of a manifold and exterior derivative
Definition
Let f and g two functions from E to F , f and g are k-homotopic
if there exists an application:
H : [0, 1]k × E → F , with [0, 1]0 = {0, 1} . (8)
such (u1 , . . . , uk ) → H(u1 , . . . , uk , x) continuous,
H(0, . . . , 0, x) = f (x) and H(1, . . . , 1, x) = g (x).
Two topological spaces E and F has the same k-homotopy if there
exists two functions f : E → F and g : F → E such g ◦ f and f ◦ g
are k-homotopic to the respective identity functions.
J´rˆme Lapuyade-Lahorgue
eo 11/ 49
Element of differential geometry and applications to probability and statistics](https://image.slidesharecdn.com/differentialgeometry-12966498162548-phpapp02/85/Differential-Geometry-13-320.jpg)
![Element of differential geometry Riemannian geometry No Riemannian geometry
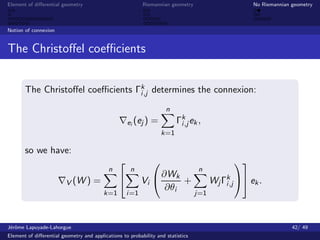
Operations on differential forms
Orientation of the border
Let V = ϕ([0, 1]n ) a n-dimensional sub-manifold such δV = ∅ and
consider:
α = fdθ1 ∧ . . . ∧ θj−1 ∧ θj+1 ∧ . . . ∧ θn (10)
We have:
α = j [f (θj = 1) − f (θj = 0)] dθ1 . . . dθj−1 dθj+1 . . . dθn
δV [0,1]n−1
∂f
= j dθ1 . . . dθn
[0,1]n ∂θj
= j (−1)j−1 dα. (11)
V
So j = (−1)j−1 .
J´rˆme Lapuyade-Lahorgue
eo 16/ 49
Element of differential geometry and applications to probability and statistics](https://image.slidesharecdn.com/differentialgeometry-12966498162548-phpapp02/85/Differential-Geometry-18-320.jpg)
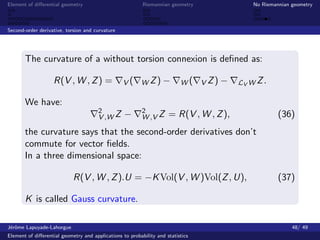
![Element of differential geometry Riemannian geometry No Riemannian geometry
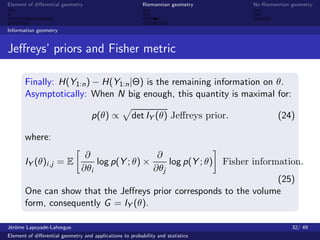
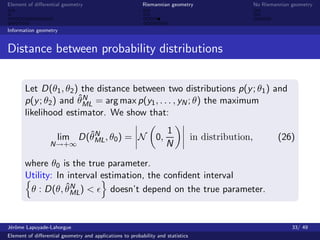
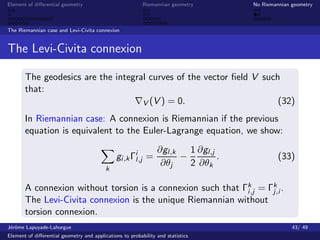
Information geometry
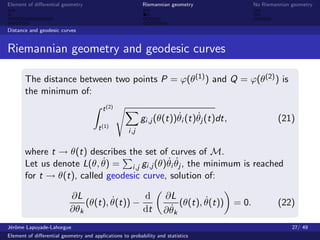
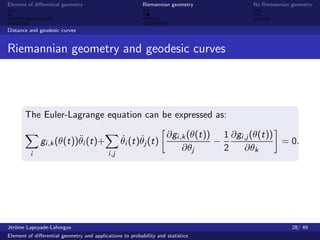
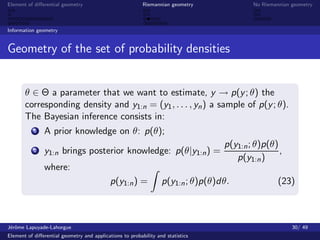
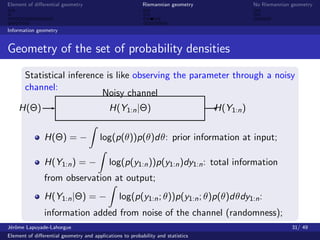
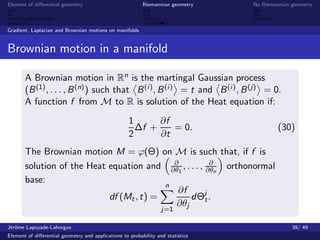
Geometry of the set of probability densities
We study parameterized set of probability distribution.
At each θ ∈ Θ ⊂ Rk , we associate a probability density
y → p(y ; θ):
b
p(y ; θ)dy = 1 and Pθ (Y ∈ [a, b]) = p(y ; θ)dy ;
a
For each fixed y , θ → p(y ; θ) is differentiable.
The Riemannian metric is chosen in order to the volume form is
the prior distribution such that an infinite sample of p(y ; θ)
provides the maximum of information.
J´rˆme Lapuyade-Lahorgue
eo 29/ 49
Element of differential geometry and applications to probability and statistics](https://image.slidesharecdn.com/differentialgeometry-12966498162548-phpapp02/85/Differential-Geometry-32-320.jpg)
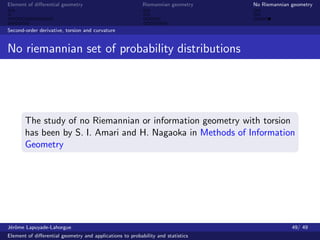
![Element of differential geometry Riemannian geometry No Riemannian geometry
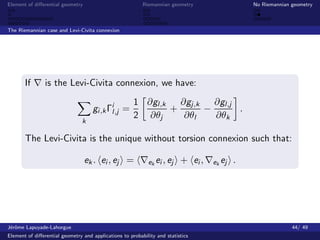
Gradient, Laplacian and Brownian motions on manifolds
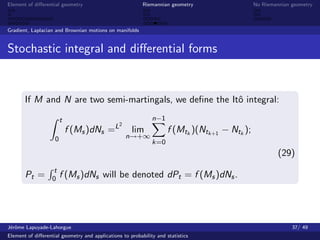
Martingals, local martingals and semi-martingals
Let (Ω, A, P) a probability space.
A continuous time process (Mt ) is a martingal if
E [Mt |σ((Mu )u≤s )] = Ms for any s ≤ t;
A continuous time process (Mt ) is a local martingal if there
exists an increasing sequence of stopping times (Tn ) such that
the processes (Mt∧Tn ) are martingals;
A predictible process (At ) is a process such that for any
ω ∈ Ω, there exists a Radon measure µ(ω) such that
At (ω) − As (ω) = µ(ω) (]s, t]);
A semi-martingal is the sum of a local martingal and a
predictible process.
J´rˆme Lapuyade-Lahorgue
eo 36/ 49
Element of differential geometry and applications to probability and statistics](https://image.slidesharecdn.com/differentialgeometry-12966498162548-phpapp02/85/Differential-Geometry-39-320.jpg)

























































![Function an old french mathematician said[1]12](https://cdn.slidesharecdn.com/ss_thumbnails/functionanoldfrenchmathematiciansaid112-150908190934-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)




























