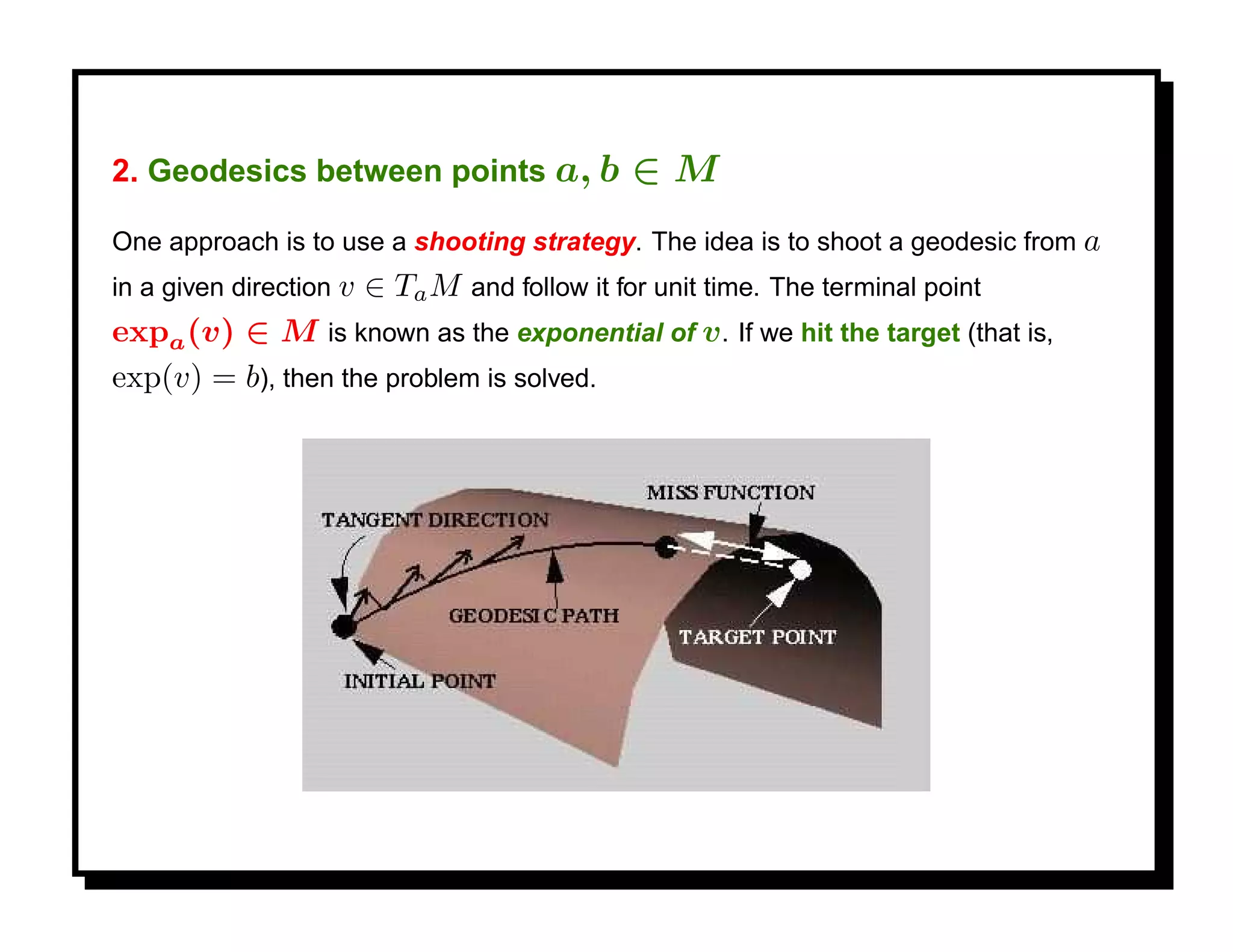
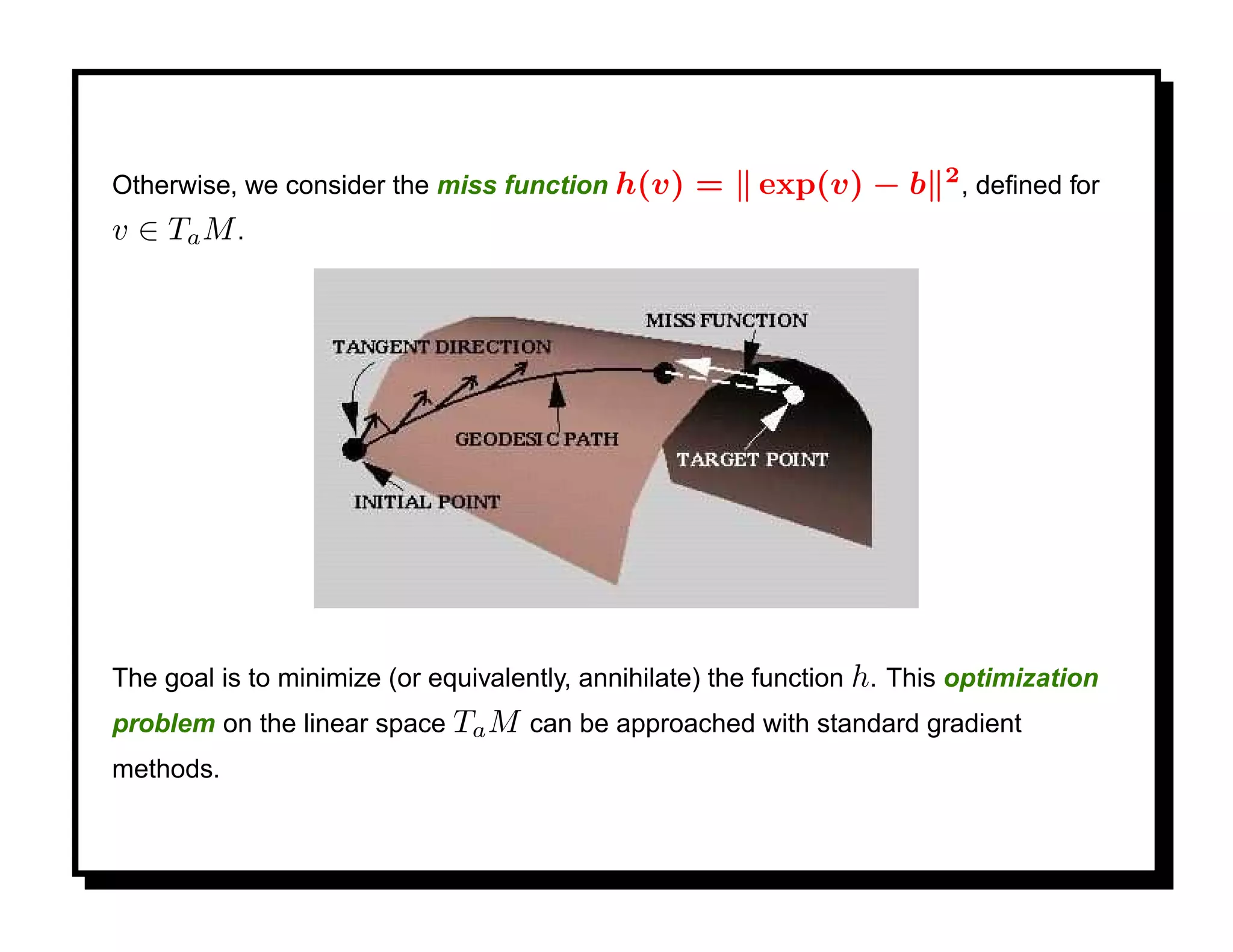
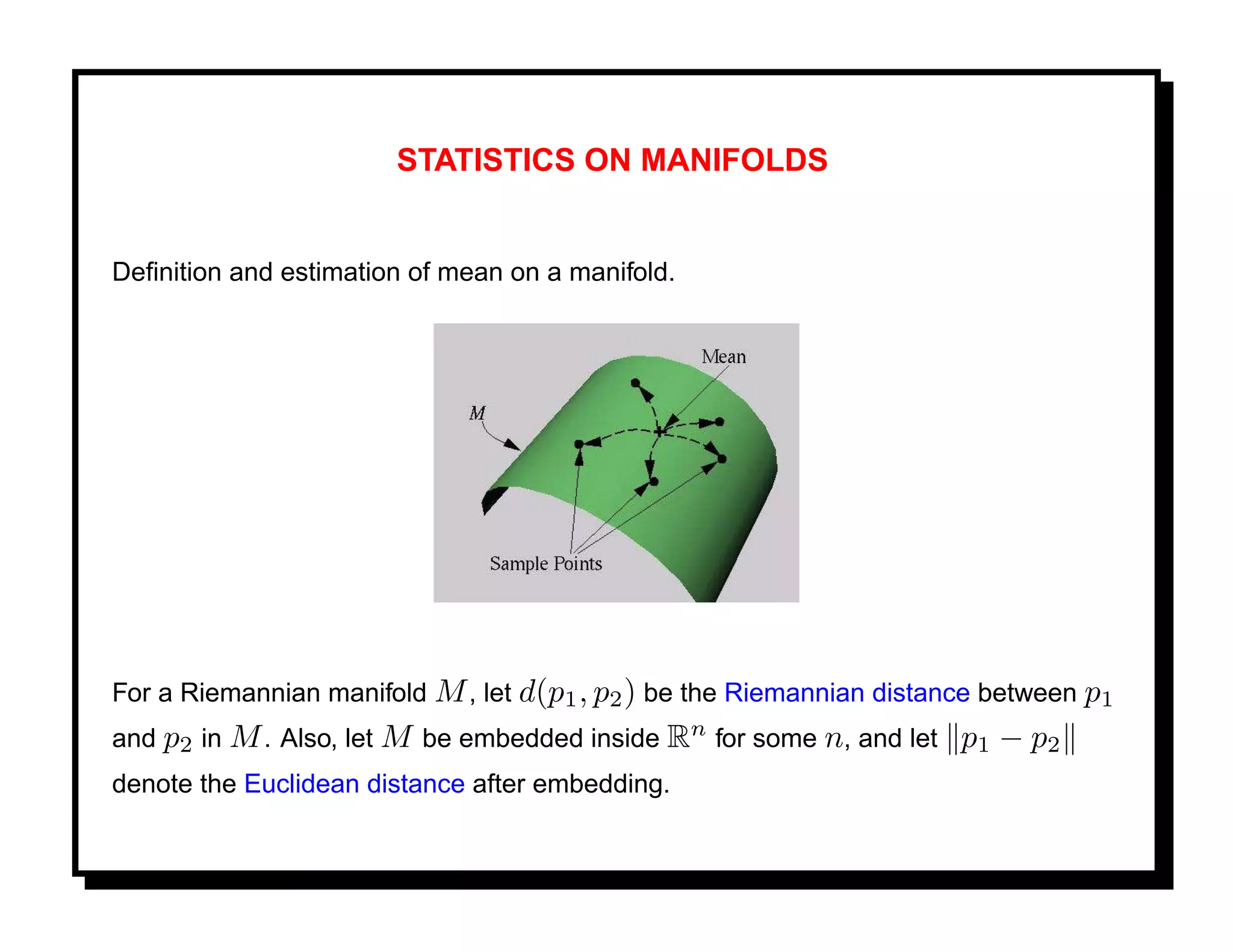
This document provides an overview of a 2004 CVPR tutorial on nonlinear manifolds in computer vision. The tutorial is divided into four parts that cover: (1) motivation for studying nonlinear manifolds and how differential geometry can be useful in vision, (2) tools from differential geometry like manifolds, tangent spaces, and geodesics, (3) statistics on manifolds like distributions and estimation, and (4) algorithms and applications in computer vision like pose estimation, tracking, and optimal linear projections. Nonlinear manifolds are important in computer vision as the underlying spaces in problems involving constraints like objects on circles or matrices with orthogonality constraints are nonlinear. Differential geometry provides a framework for generalizing tools from vector spaces to nonlinear
![NONLINEAR MANIFOLDS
• What are nonlinear manifolds?:
Nonlinear manifolds are manifolds that are not vector spaces, i.e. if x, y ∈ M,
then ax + by may not be in M , for a pair a, b ∈ R [1, 14]. The usual Euclidean
calculus may not apply. Conventional statistics may not apply. (More later in Part II)
• When do we need them?:
In applications where certain constraints make the underlying space nonlinear. For
example, elements of Rn with unit norm constraint. Or, matrices with orthogonality
constraint.
• How do we deal with them?:
Using differential geometry of the underlying manifold, one can usually derive most
of the corresponding results from Euclidean spaces.](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-4-2048.jpg)
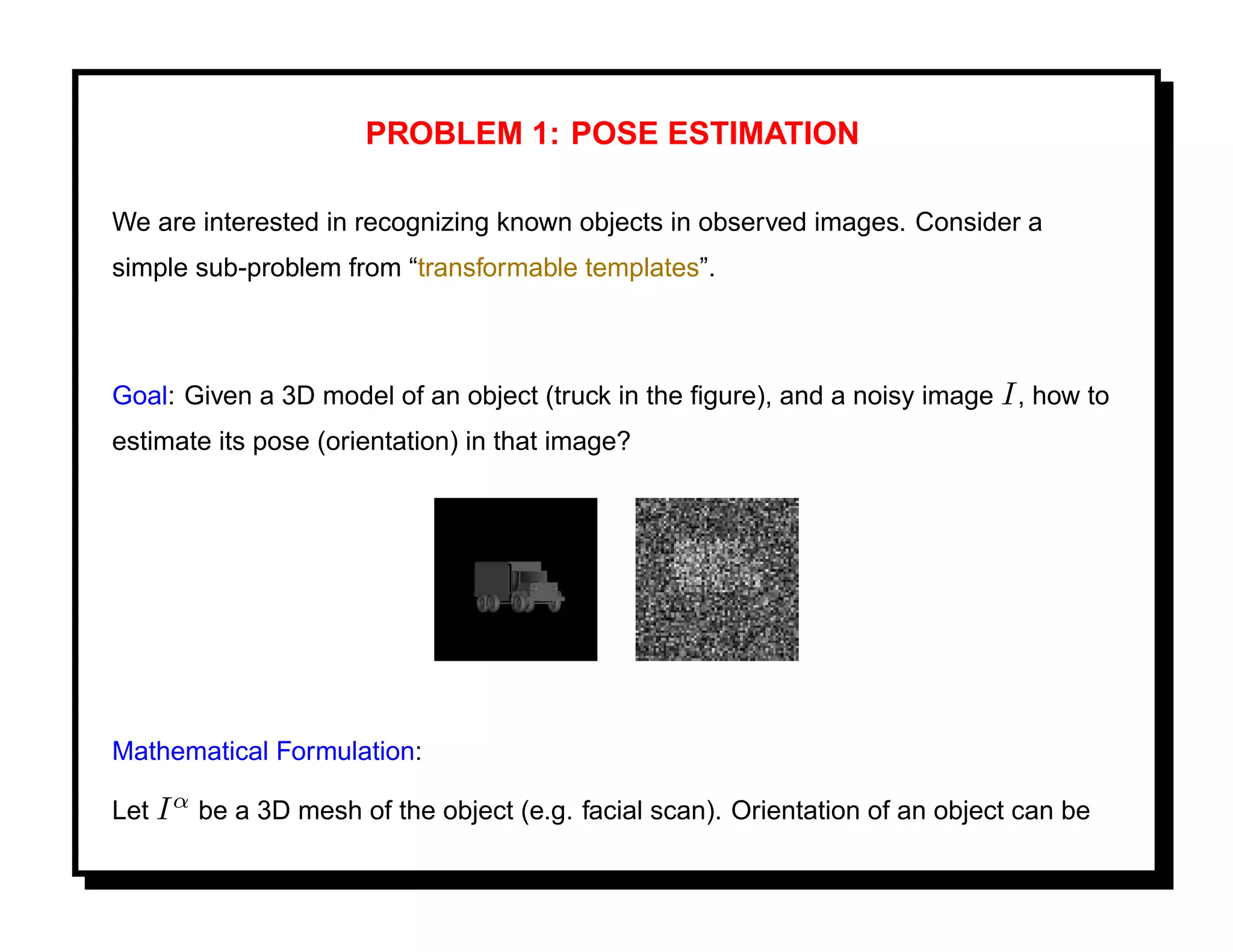
![represented by a 3 × 3 orthogonal matrix [6]. The space of all such matrices is:
SO(3) = {O ∈ R3×3 |OT O = I3 , det(O) = 1} .
Figure 1: A truck rendered at different orientations in SO(2).
Notation: Let T (sI α ) denote an image of an object α taken from a pose s ∈ SO(3).
T is a projection from R3 to R2 .
Image Model: Let a simple image model be: I = T (sI α ) ⊕ clutter.](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-8-2048.jpg)
![Problem: Given an image I , estimate s ∈ SO(3) according to:
sα = argmax P (I|s, α)
ˆ (MLE) .
s∈SO(3)
SO(3) is not a vector space. However, it is a Lie group! How to solve optimization
problems on Lie groups?
Given a function F : SO(n) → R, we need to tools to solve optimization problems
on SO(n). We need definitions of derivatives (gradients), Hessians, increments, etc.
[10, 5, 3, 15]](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-9-2048.jpg)
![Nonlinear Manifolds: Kalman filtering does not apply, but Monte Carlo methods do!
Use nonlinear filtering equations: Under usual Markov assumptions,
Predict : P (st+1 |I[1:t] ) = P (st+1 |st )P (st |I[1:t] )dst
st
P (It+1 |st+1 )P (st+1 |I[1:t] )
Update : P (st+1 |I[1:t+1] ) =
P (It+1 |I[1:t] )
Use Monte Carlo method (condensation, Jump-Diffusion, etc.) to solve for the
posterior mean, covariance, etc, at each time.
We need tools to sample from probability distributions and to compute averages from
these samples on nonlinear manifolds.
Statistics on circle: [9], statistics on SO(n): [4], statistics on Grassmann manifolds:
[16]](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-14-2048.jpg)
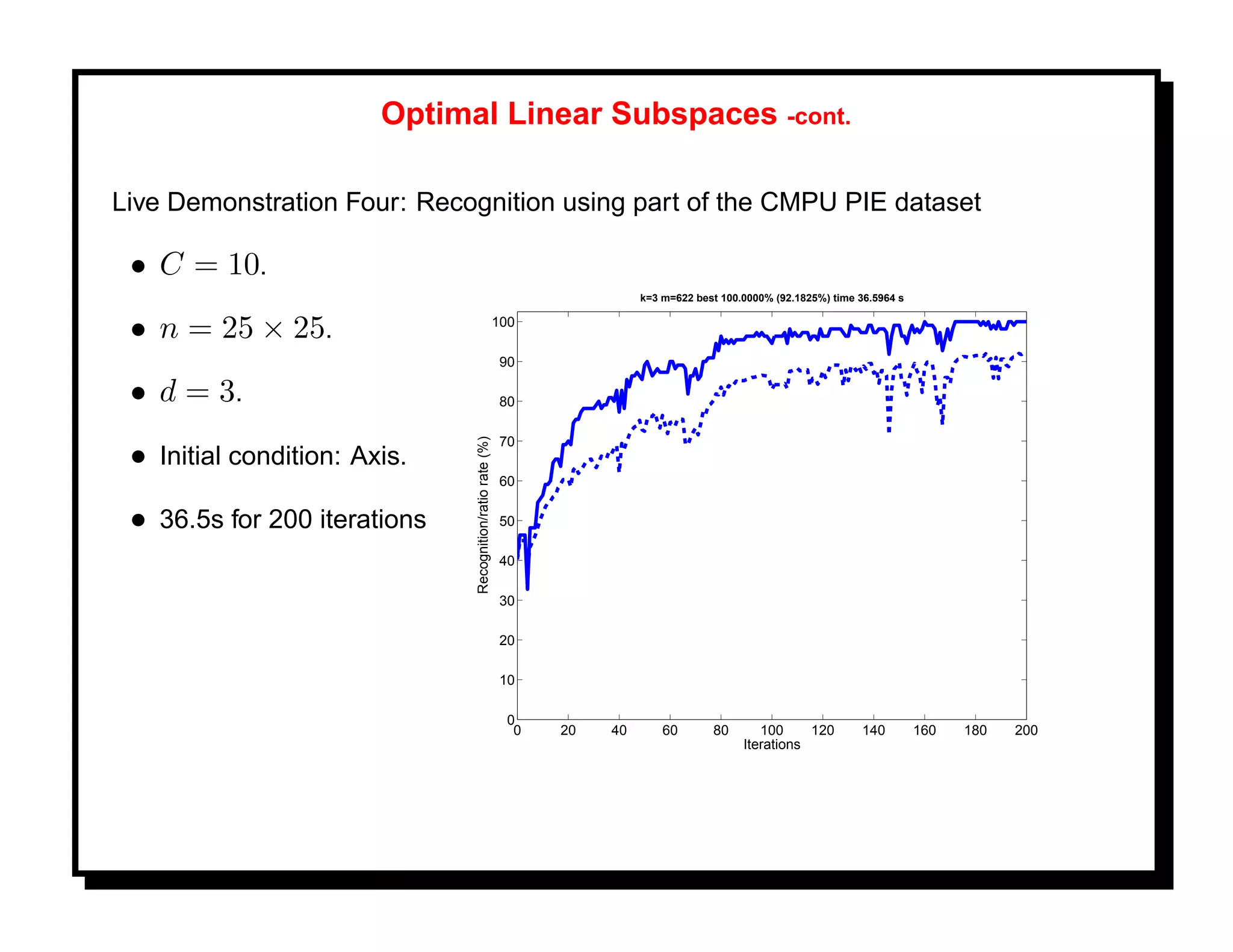
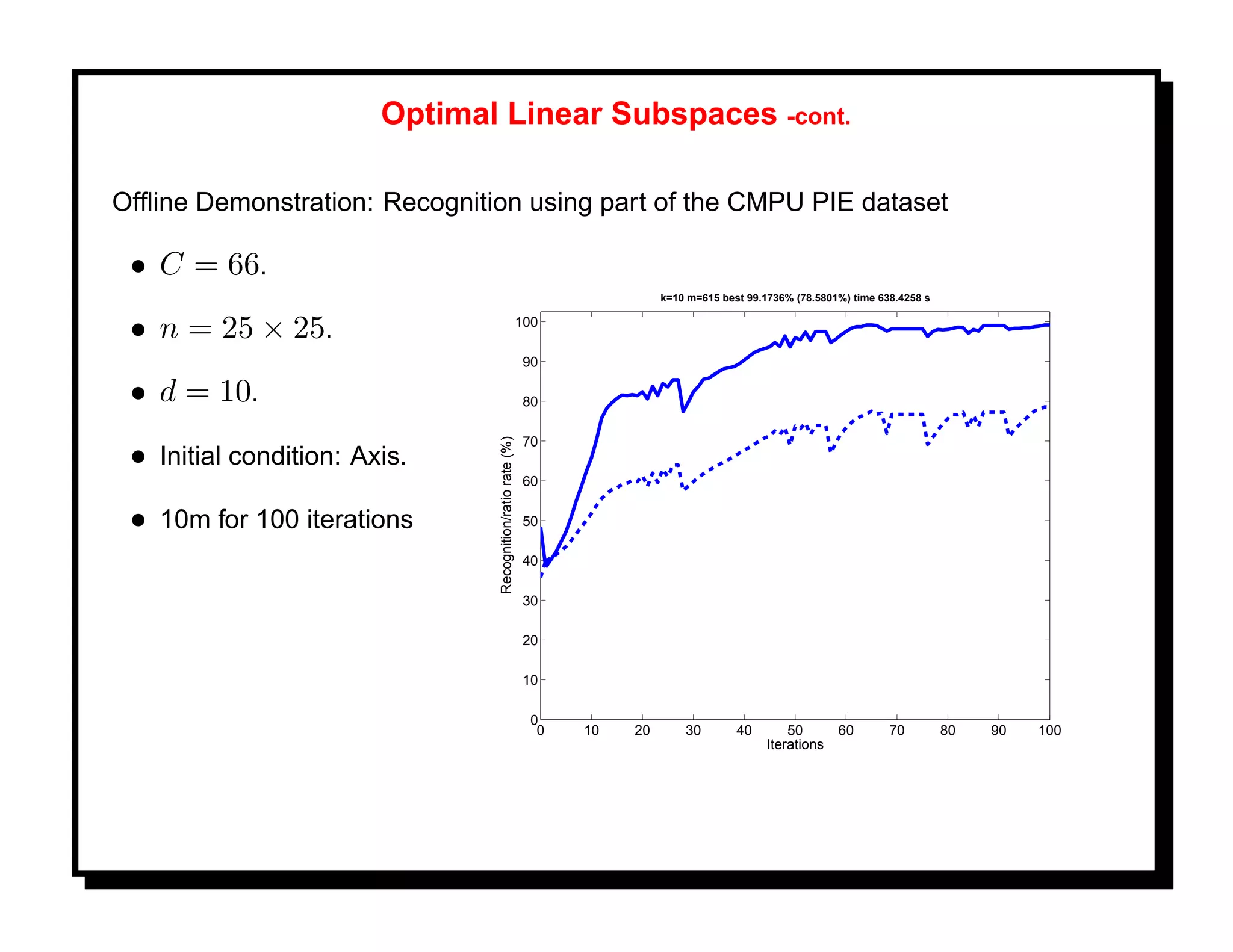
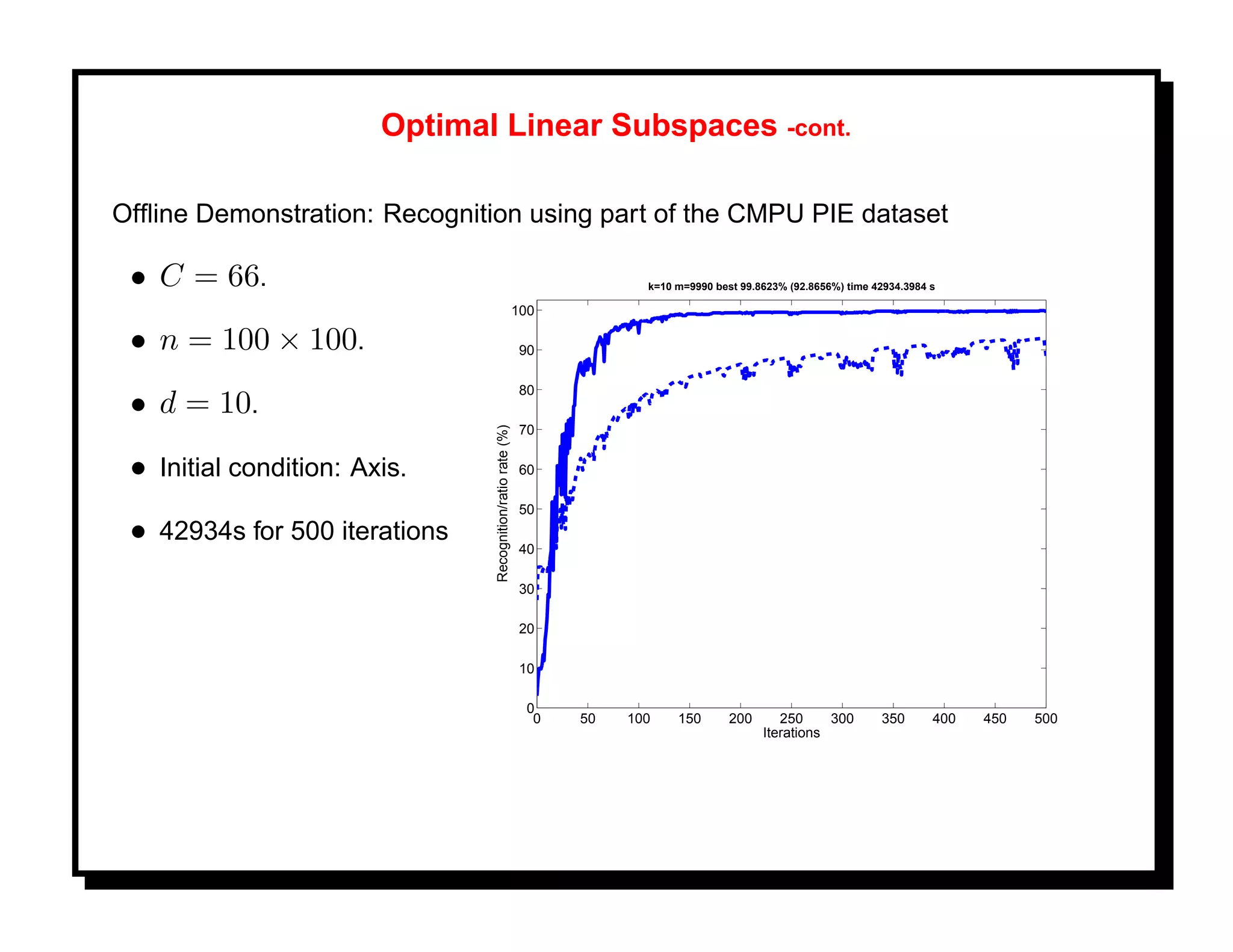
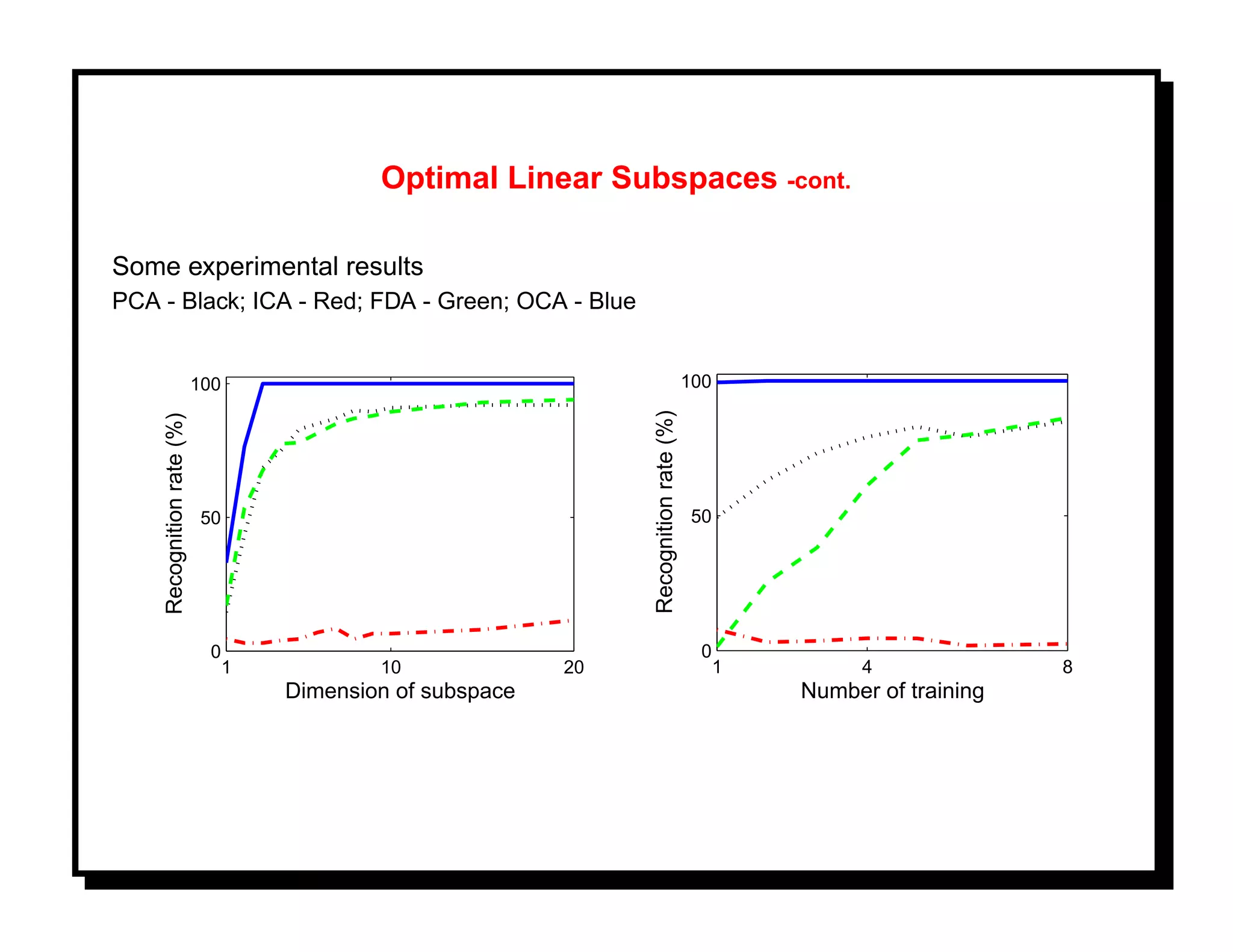
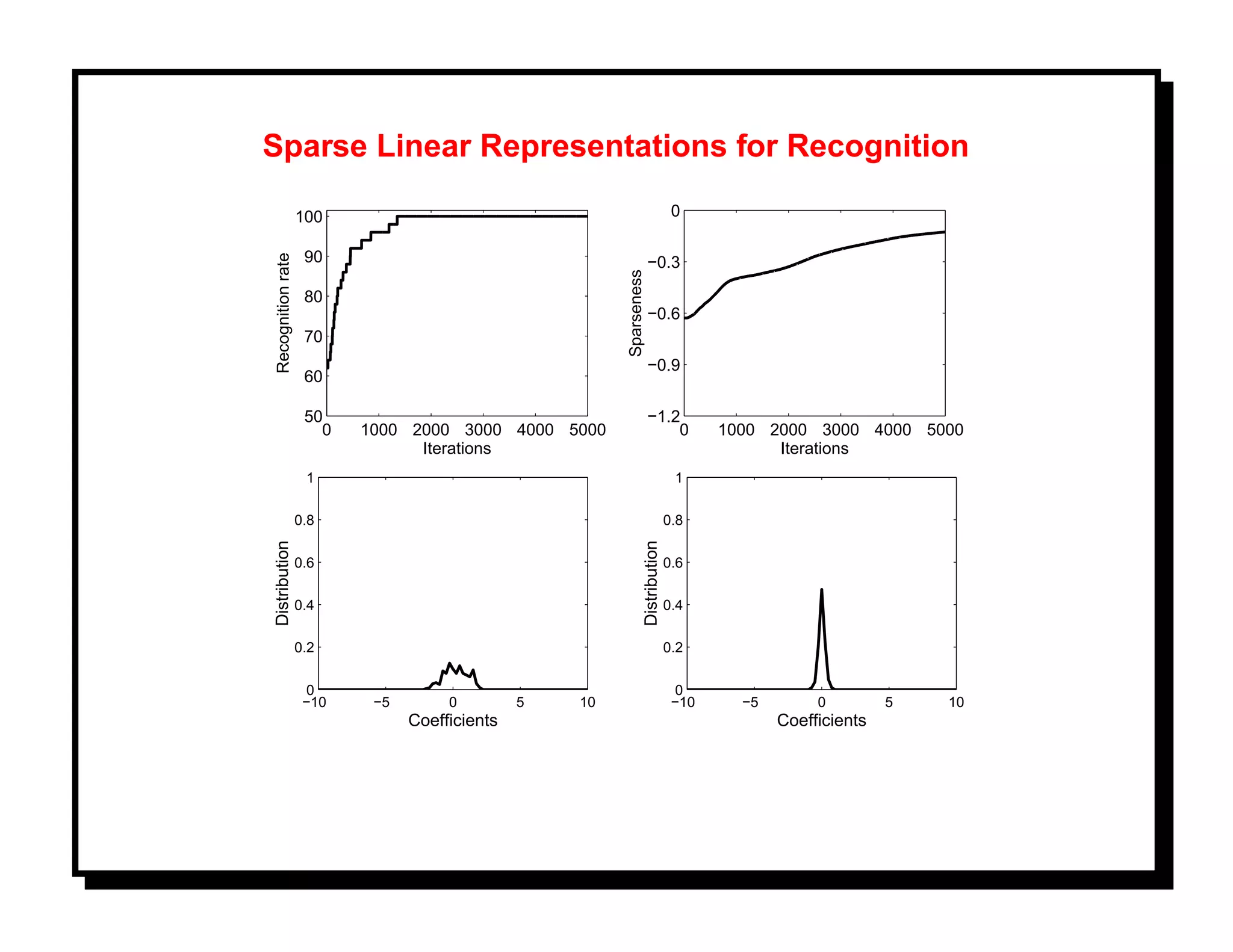
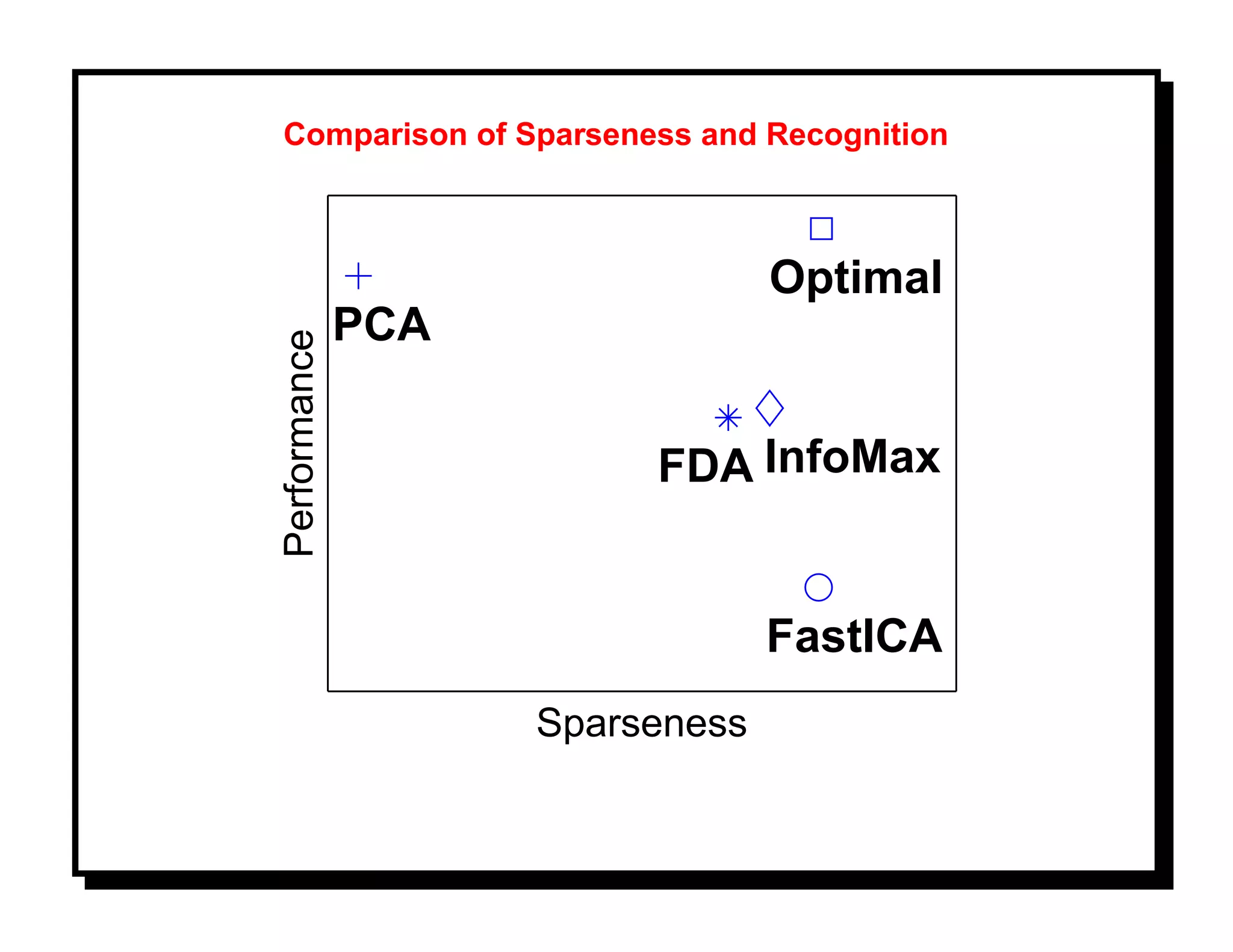
![Example: X denotes face images and u(X) is used for recognition. Let F be a
recognition performance and choose U to maximize F . U is an element of a
Grassmann manifold Gn,d . [8].
100
Recognition rate (%)
95
90
85
80
0 200 400 600 800 1000
Iterations
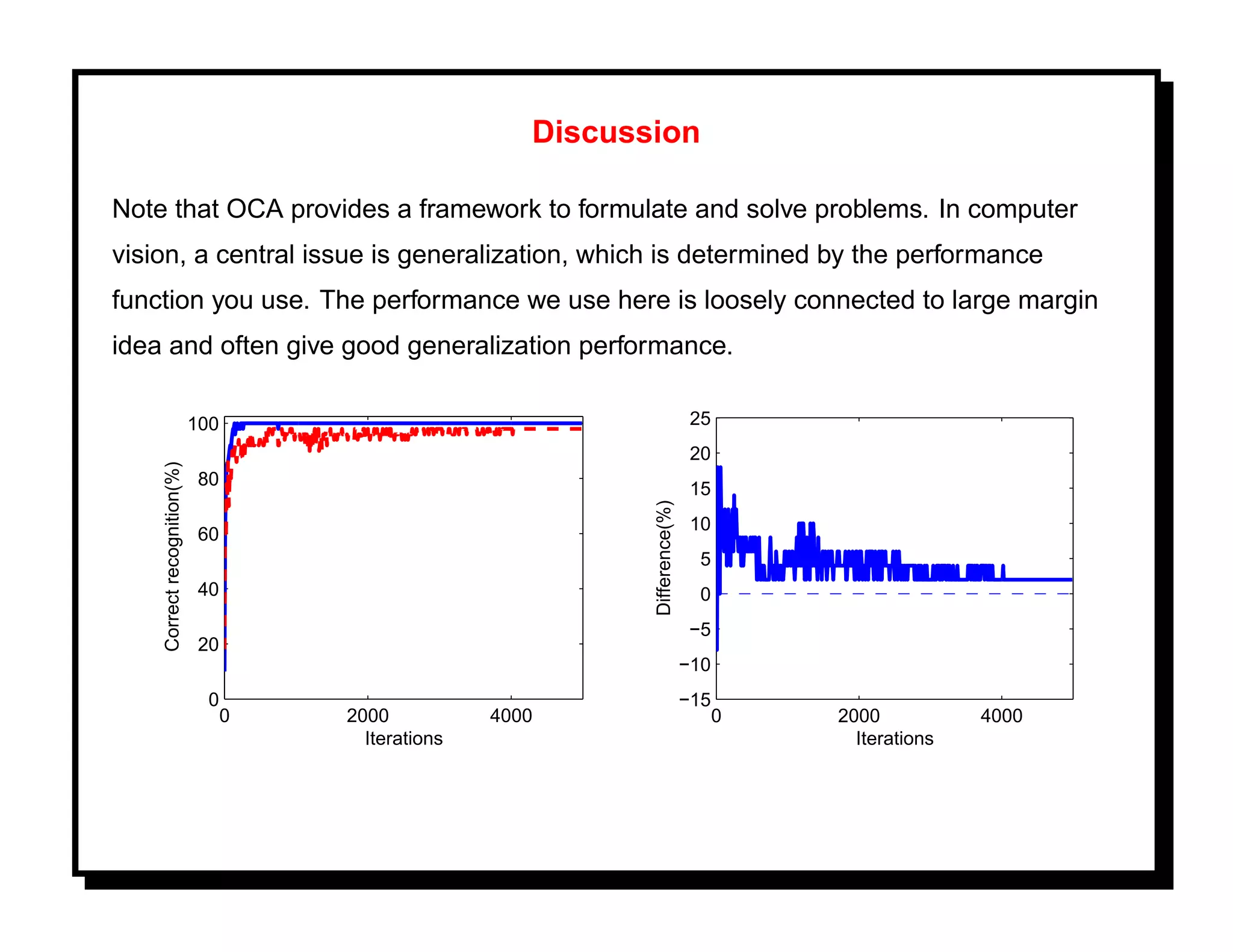
Figure shows evolution of F (Xt ), where Xt is a stochastic optimization process on
Gn,d .
(More in Part IV)](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-18-2048.jpg)
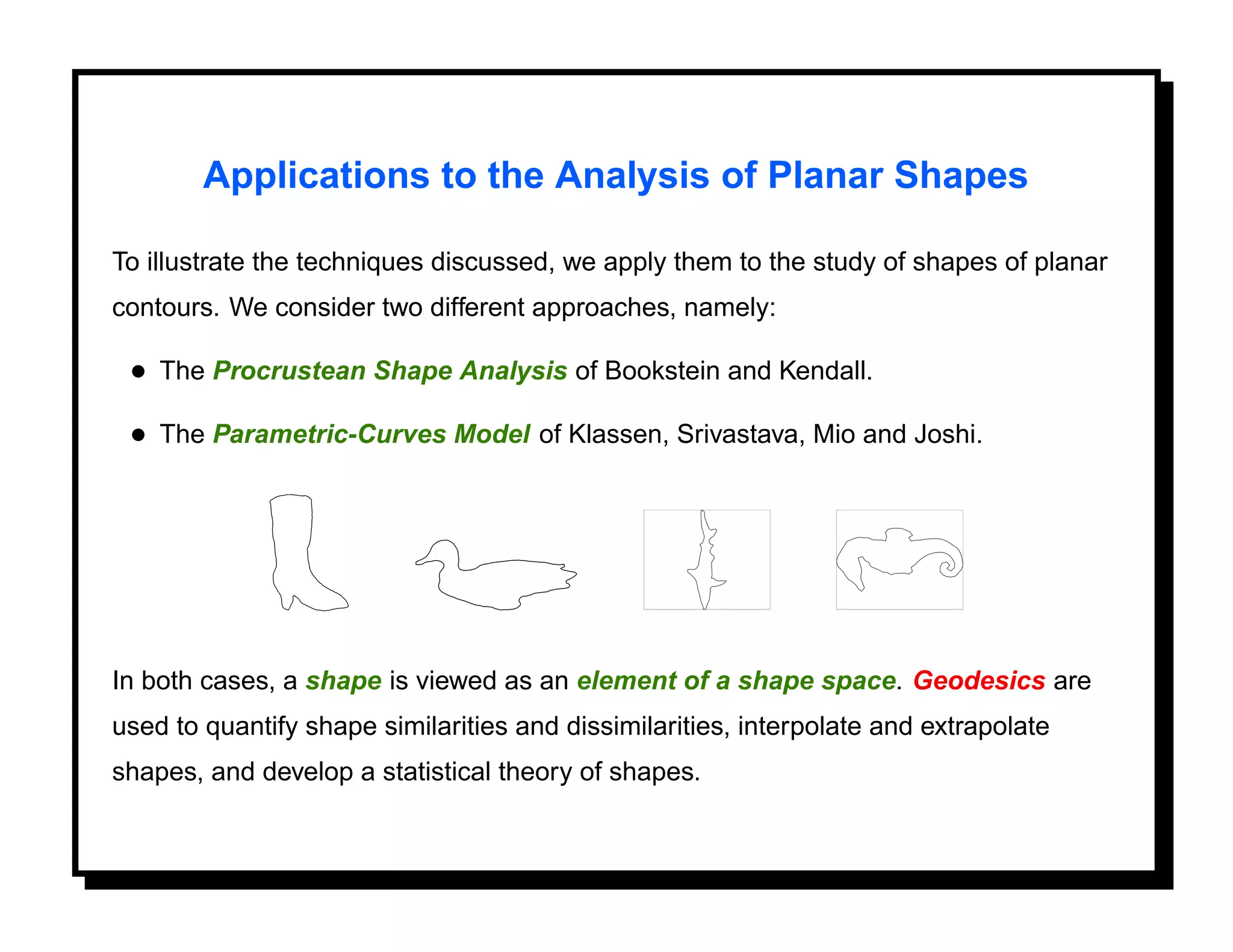
![PROCRUSTES APPROACH
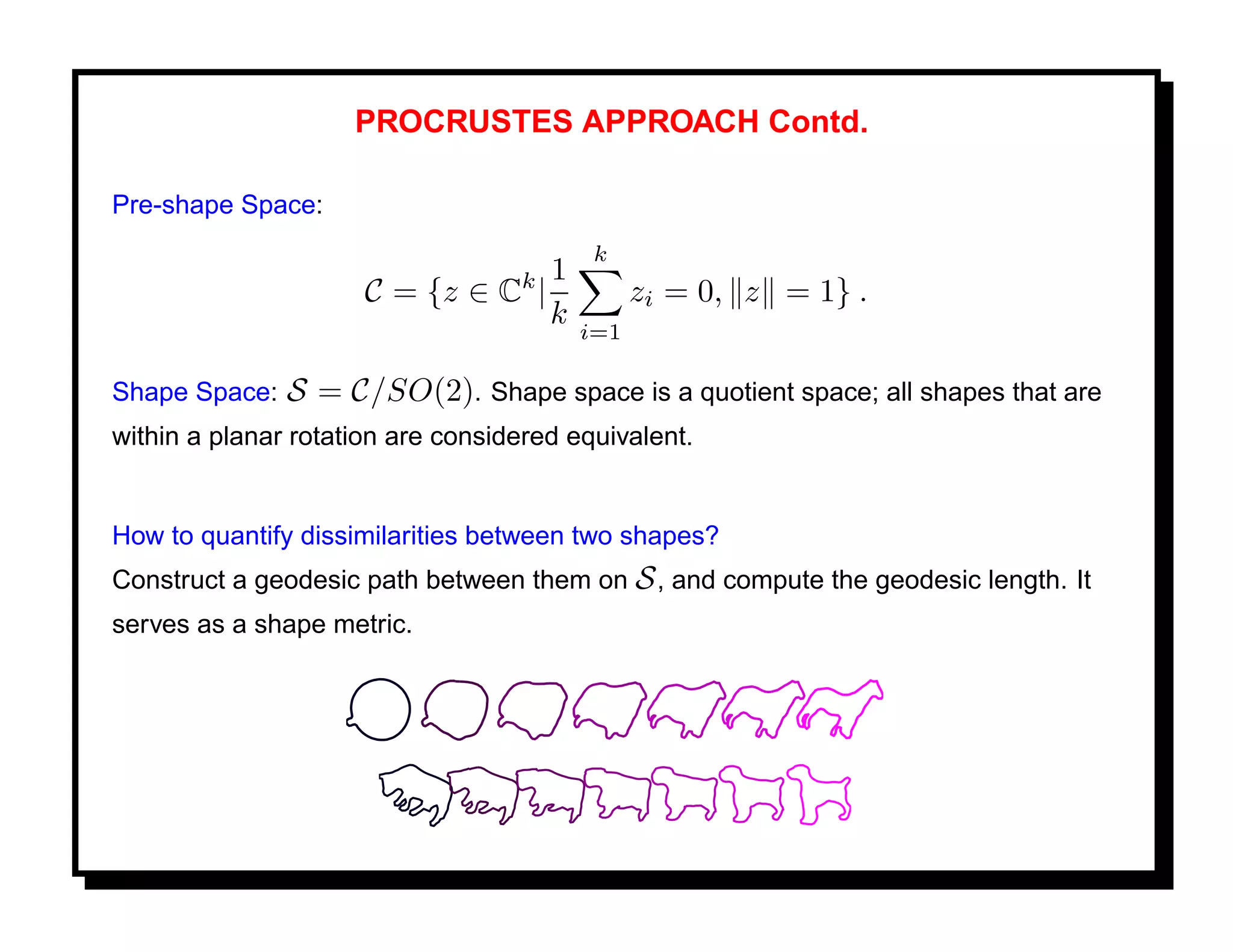
Representation: Let a shape be represented by k points on its boundary. A shape is
an element of x ∈ R2k or z ∈ Ck . [2, 13].
Shape Preserving Transformations: Under rigid rotation and translation, and uniform
scaling, the shape remains unchanged. We need a quantity that uniquely represents a
shape. Assuming known registration:
1 k
• Remove translation by assuming k i=1 zi = 0. All shapes are centered.
• Remove scale by assuming z = 1, i.e. all shape vectors lie on a unit sphere.
• Remove rotation in a pairwise fashion. For example, to align z (2) to z (1) replace
ˆ
by ej θ z (2) , where
ˆ
θ = argmin z (1) − ejθ z (2) 2 .
θ∈SO(2)](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-20-2048.jpg)
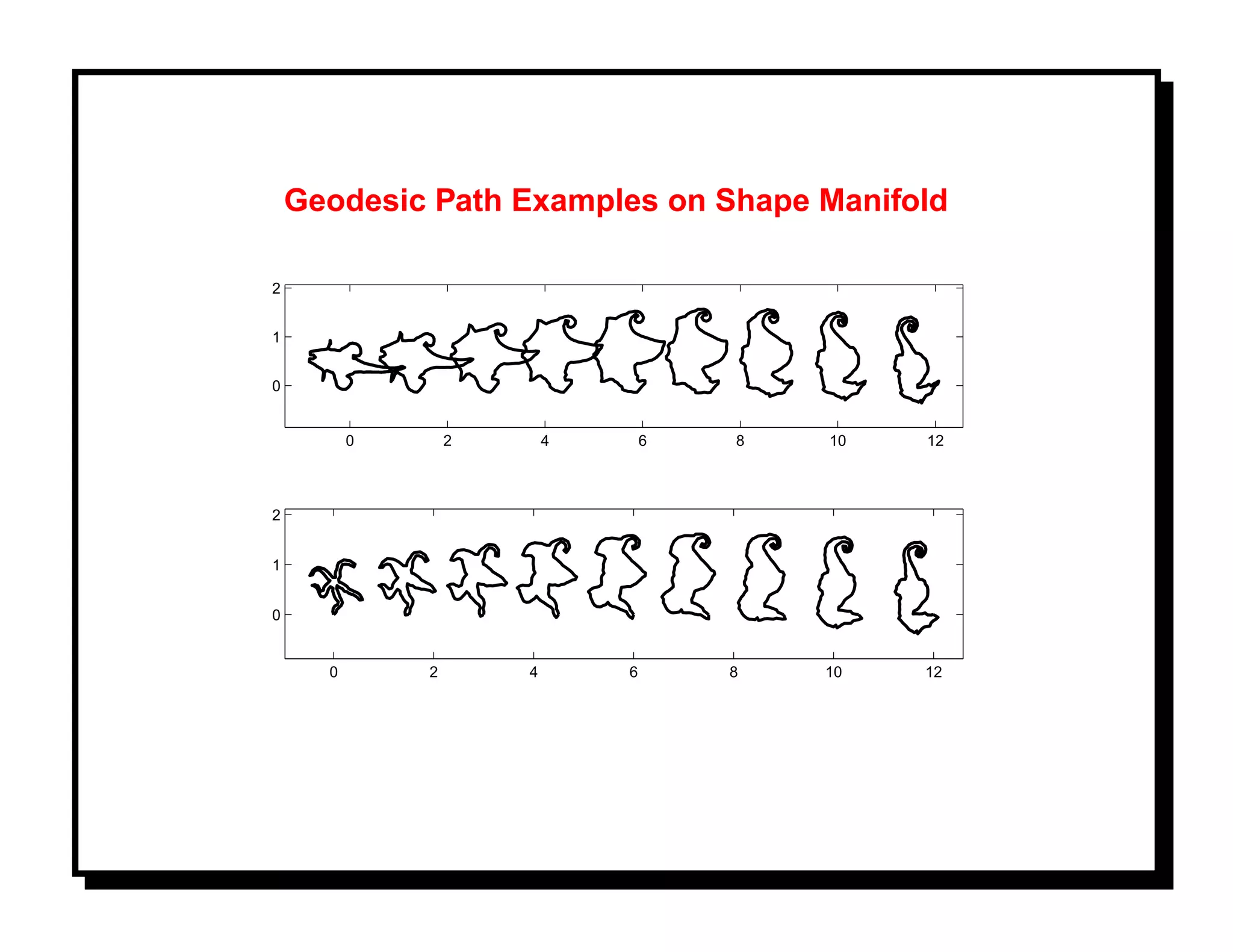
![ANOTHER APPROACH: GEOMETRY OF CLOSED CURVES
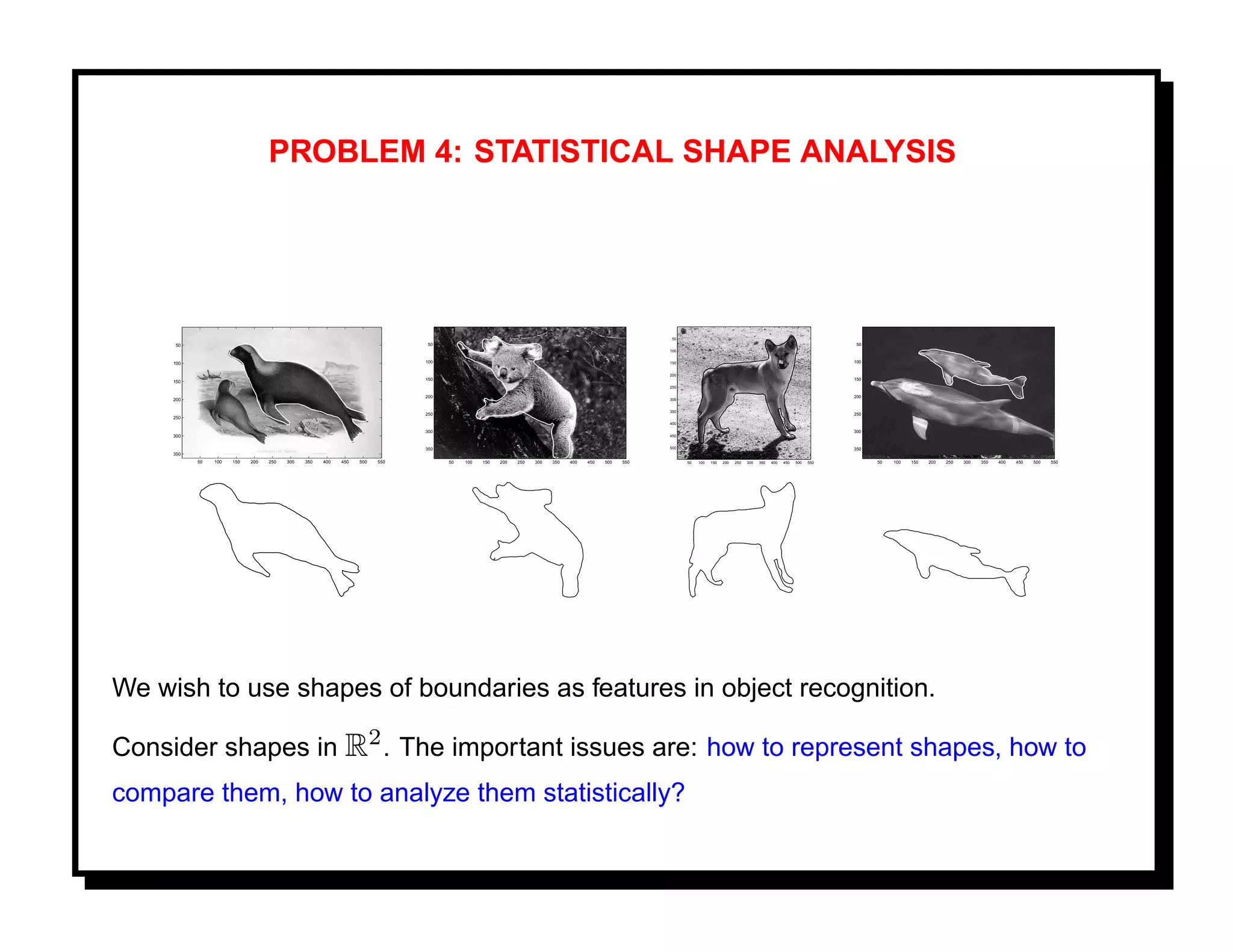
Goal: To analyze shapes of continuous boundaries of objects as they appear in
images. [7]
Representation:
• Denote shapes by their angle functions θ (with arc-length parametrization).
Consider
2π 2π
2
C = {θ ∈ L [0, 2π]| cos(θ(s))ds = sin(θ(s))ds = 0}
0 0
• Shape space S = C/S , where S includes rotation (unit circle) and
re-parametrization (unit circle) groups.
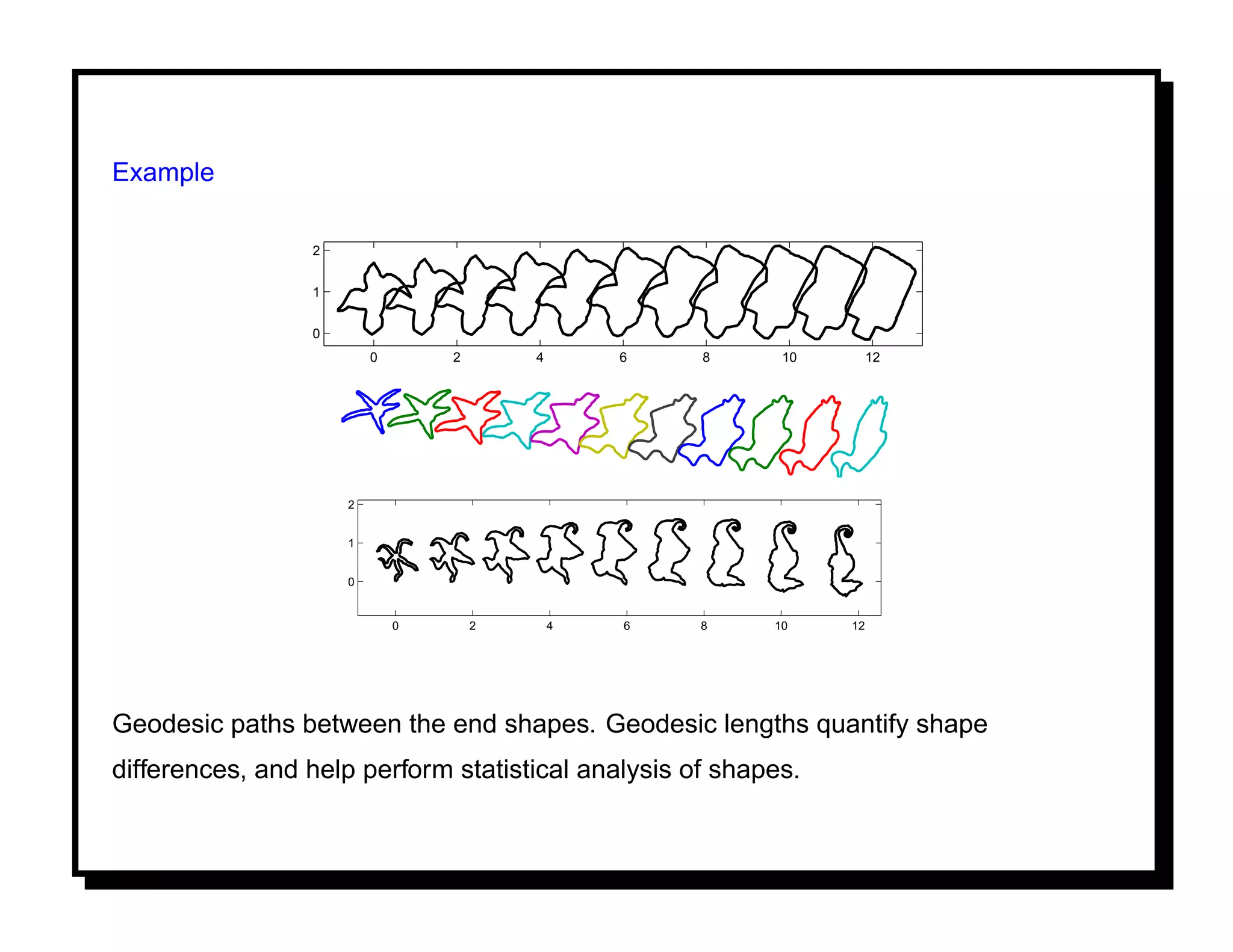
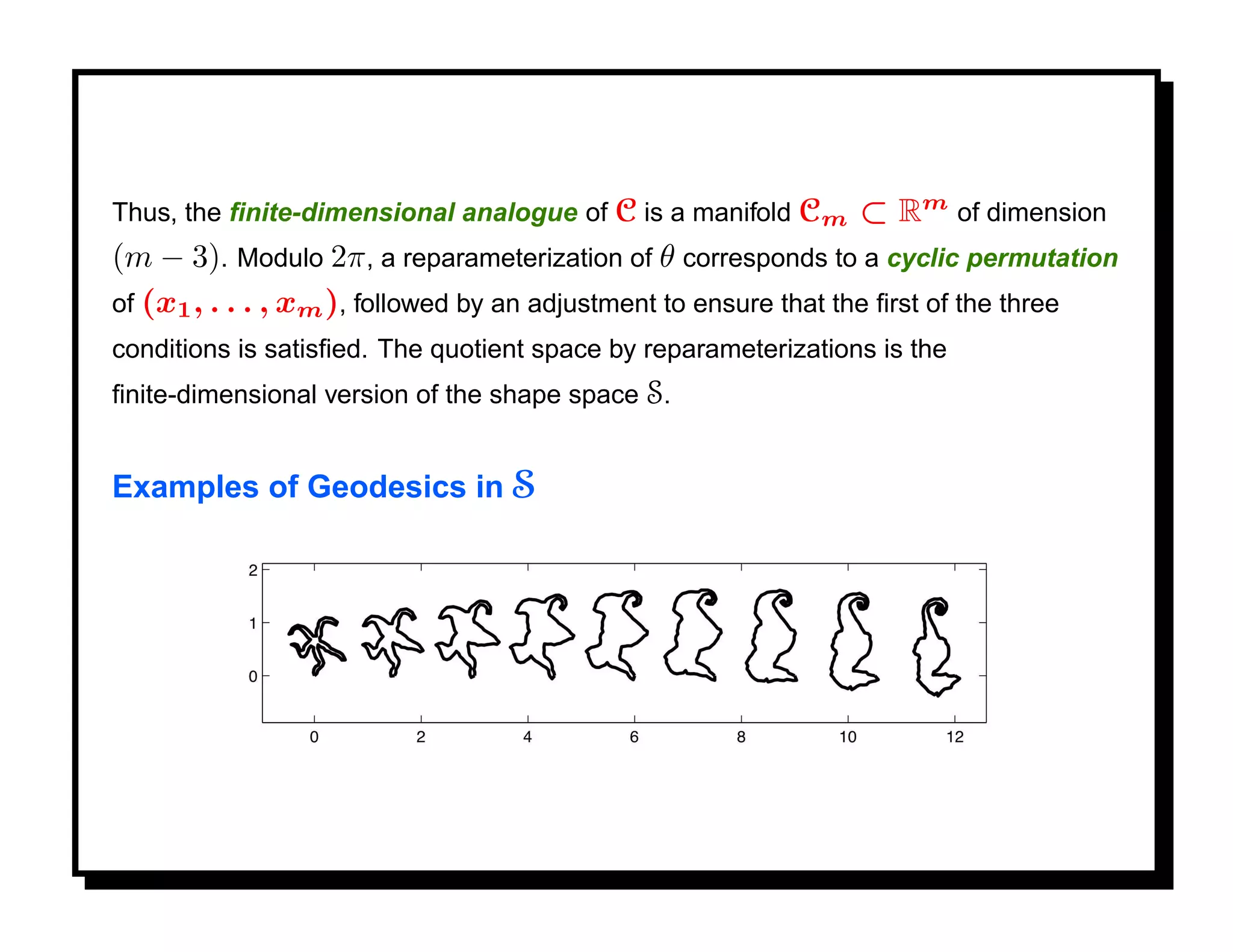
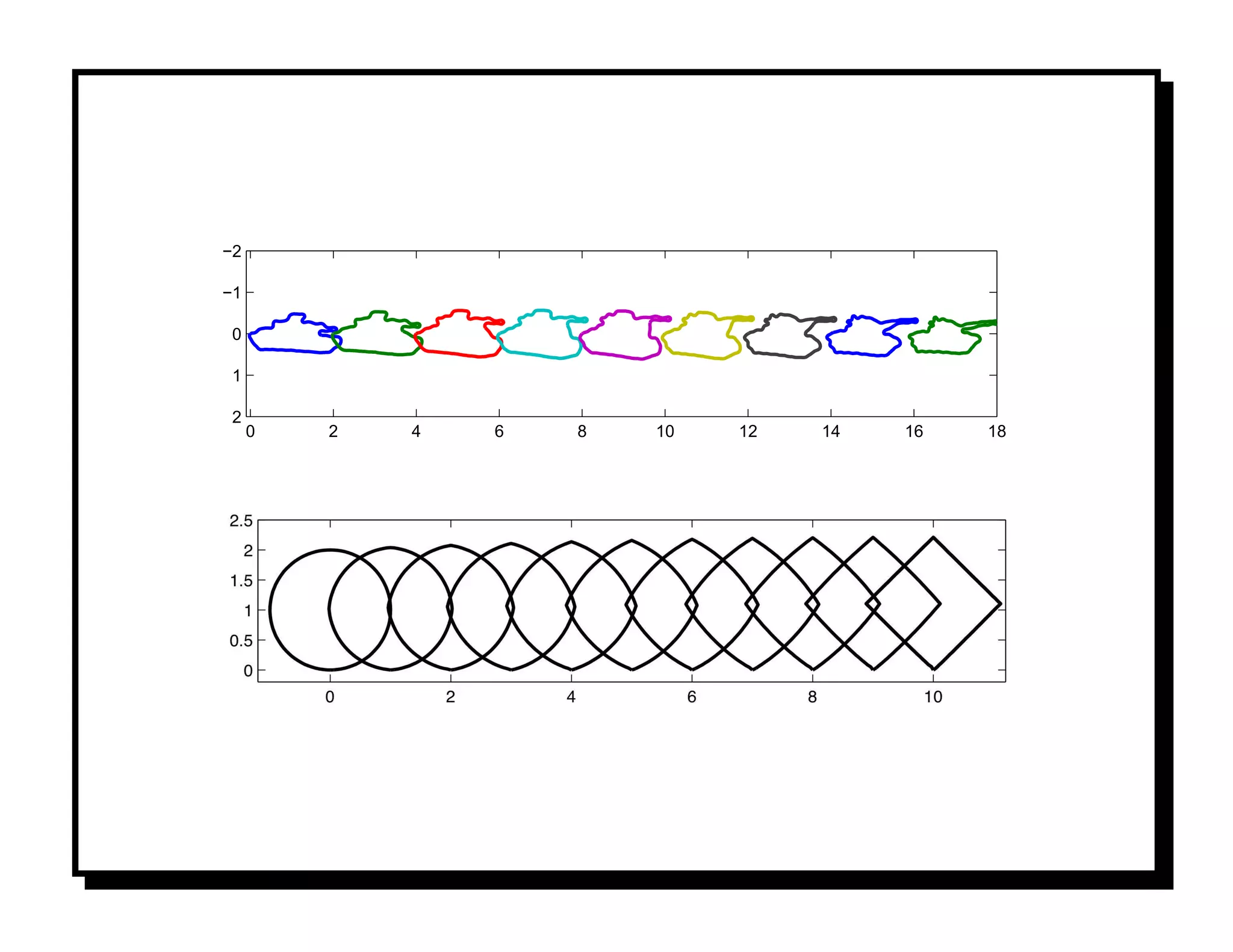
Solution: Compute exponential flows or geodesics on S to quantify shape differences.](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-22-2048.jpg)
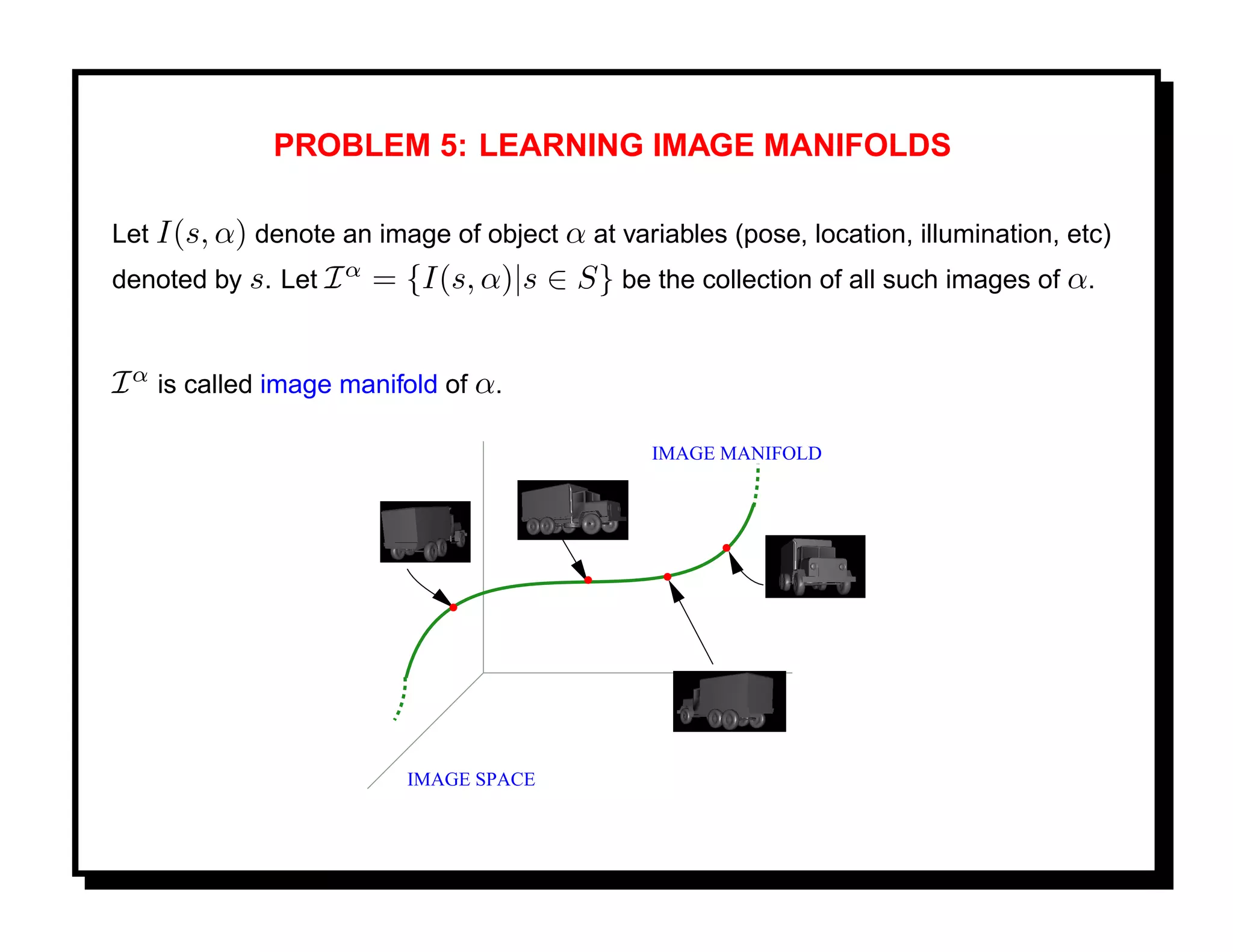
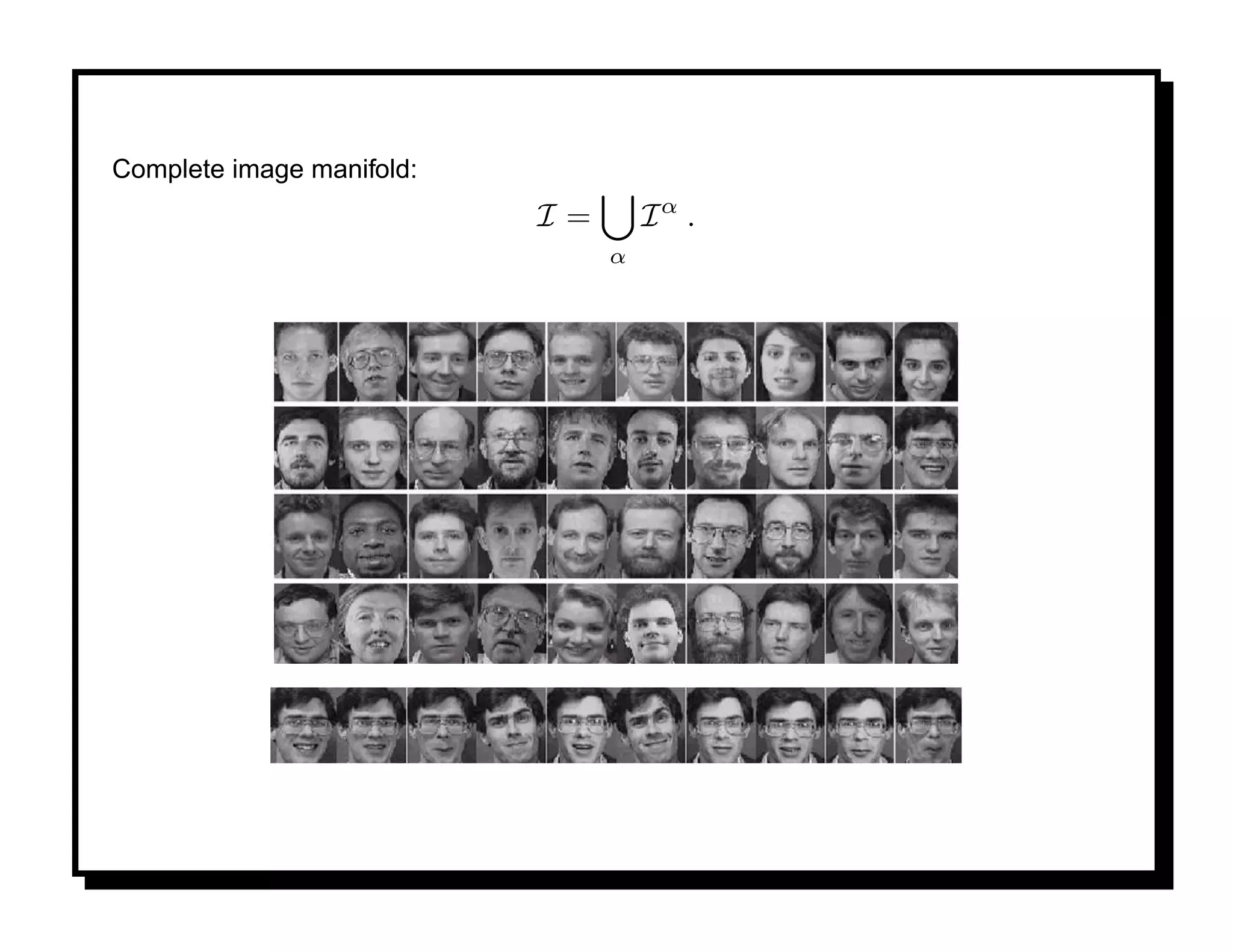
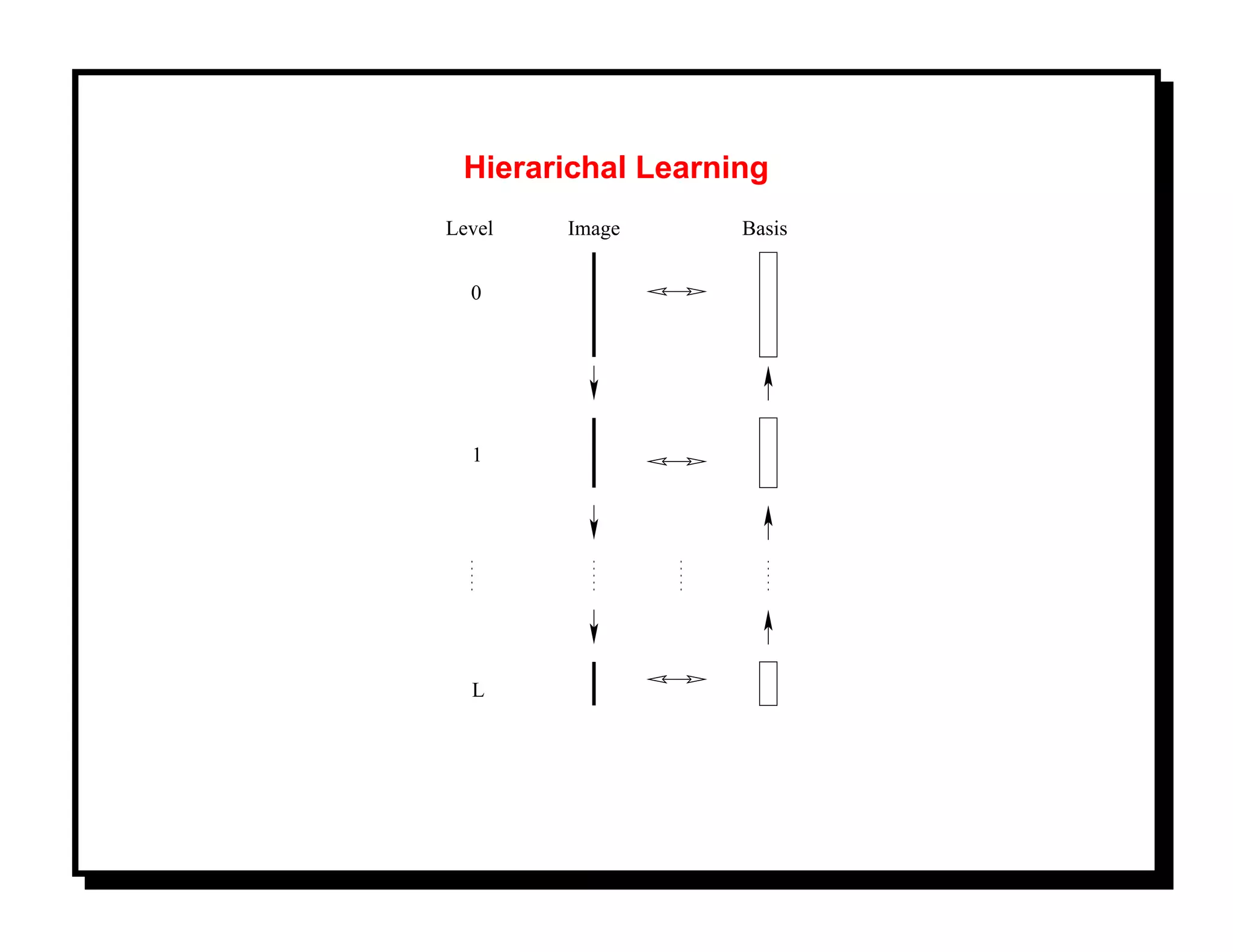
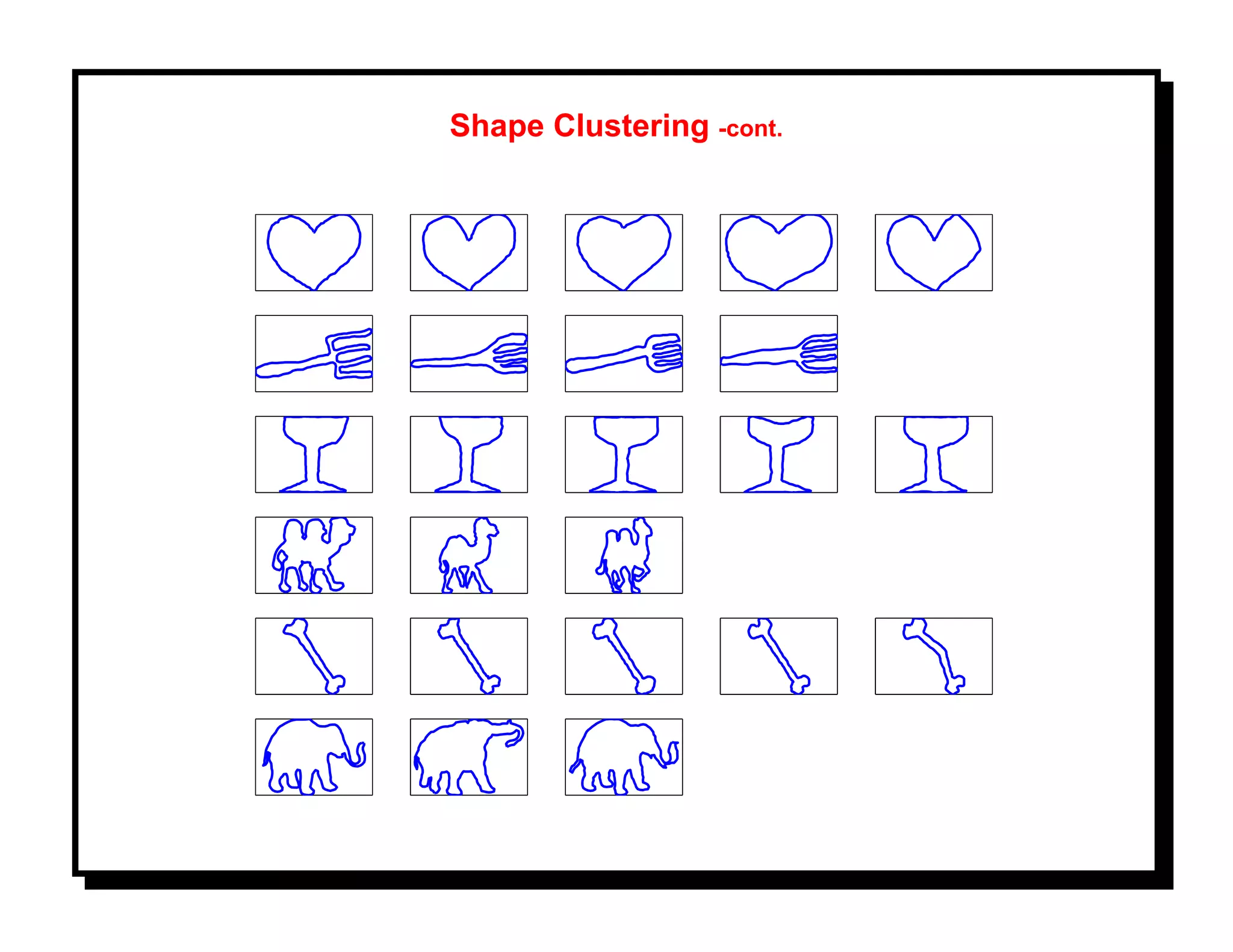
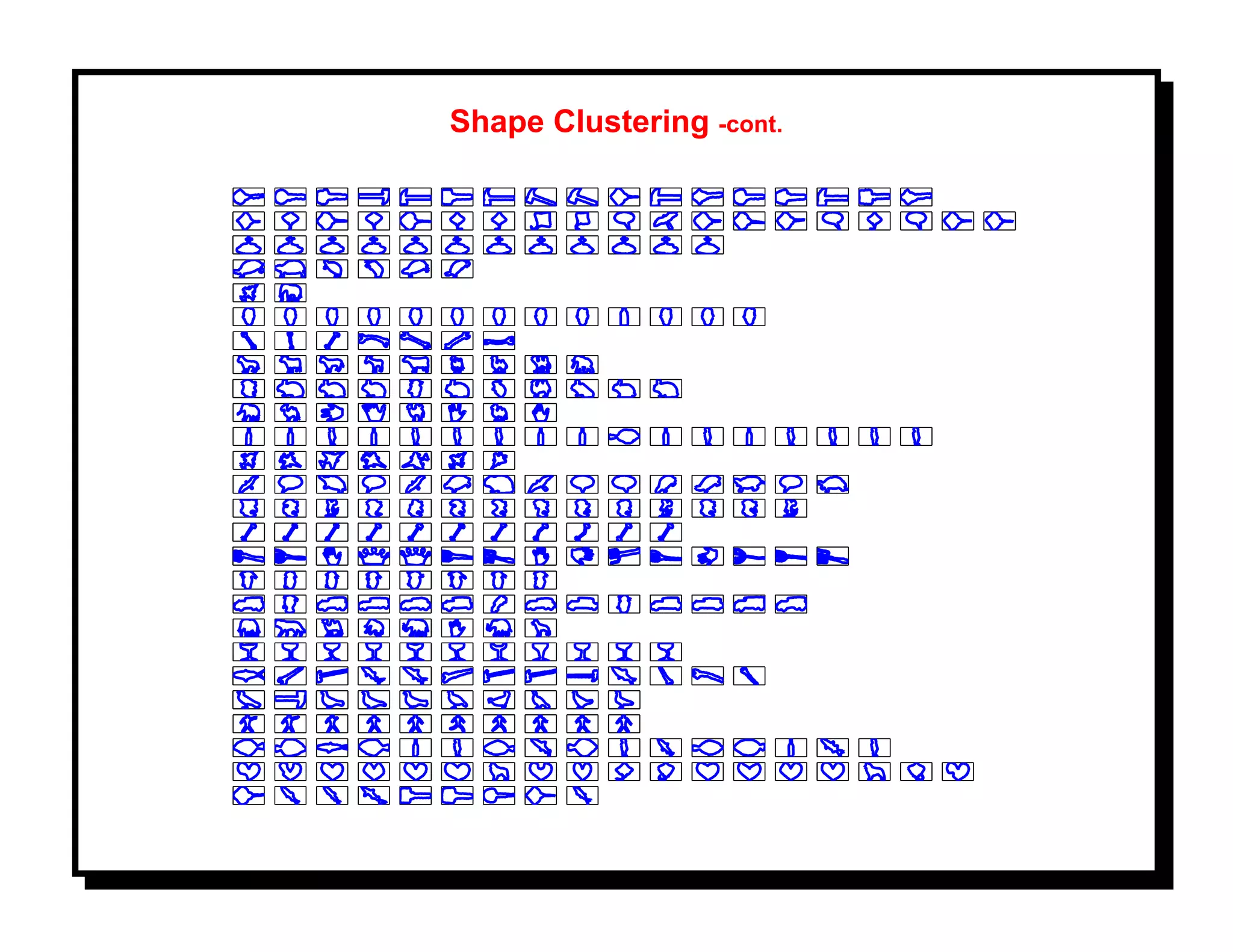
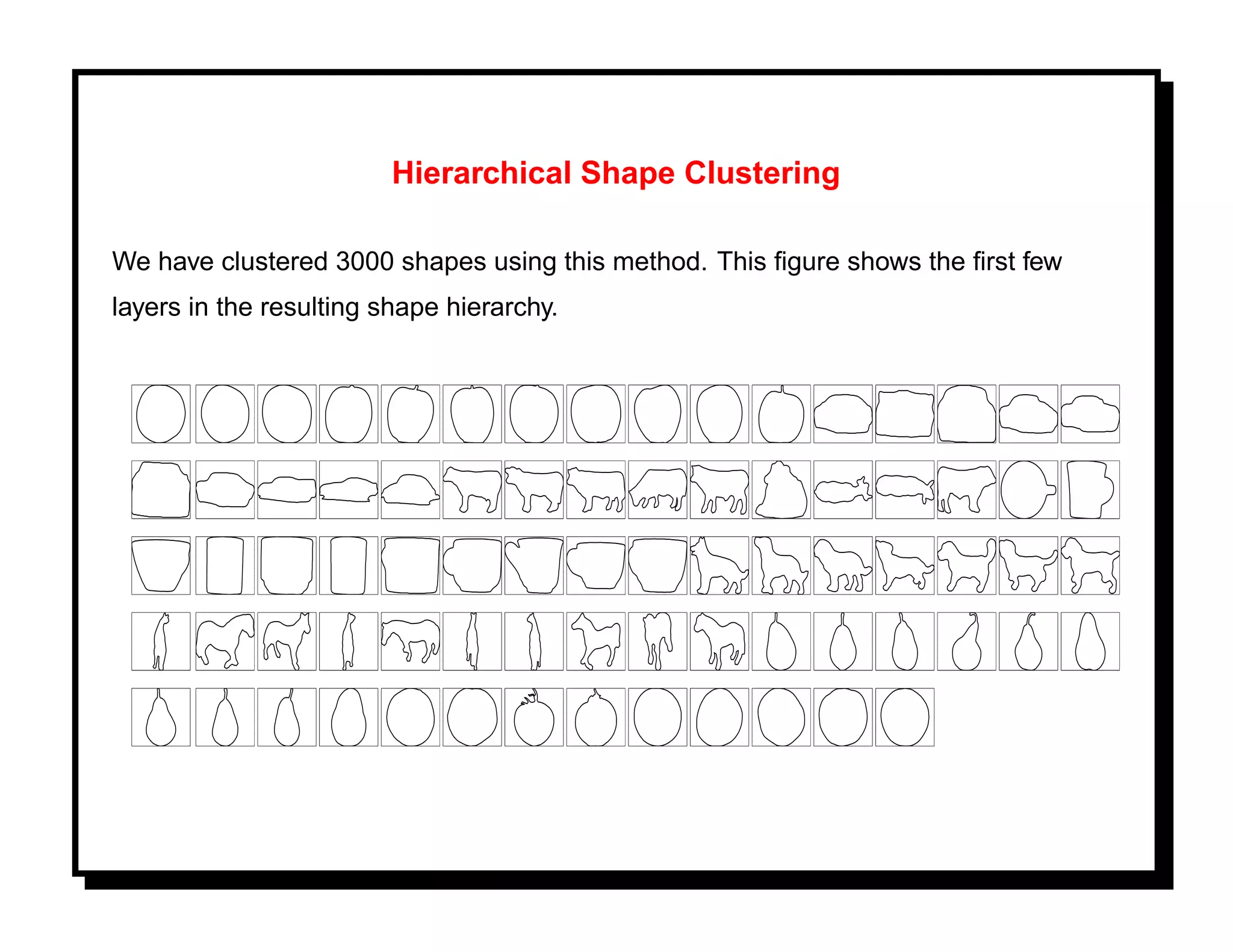
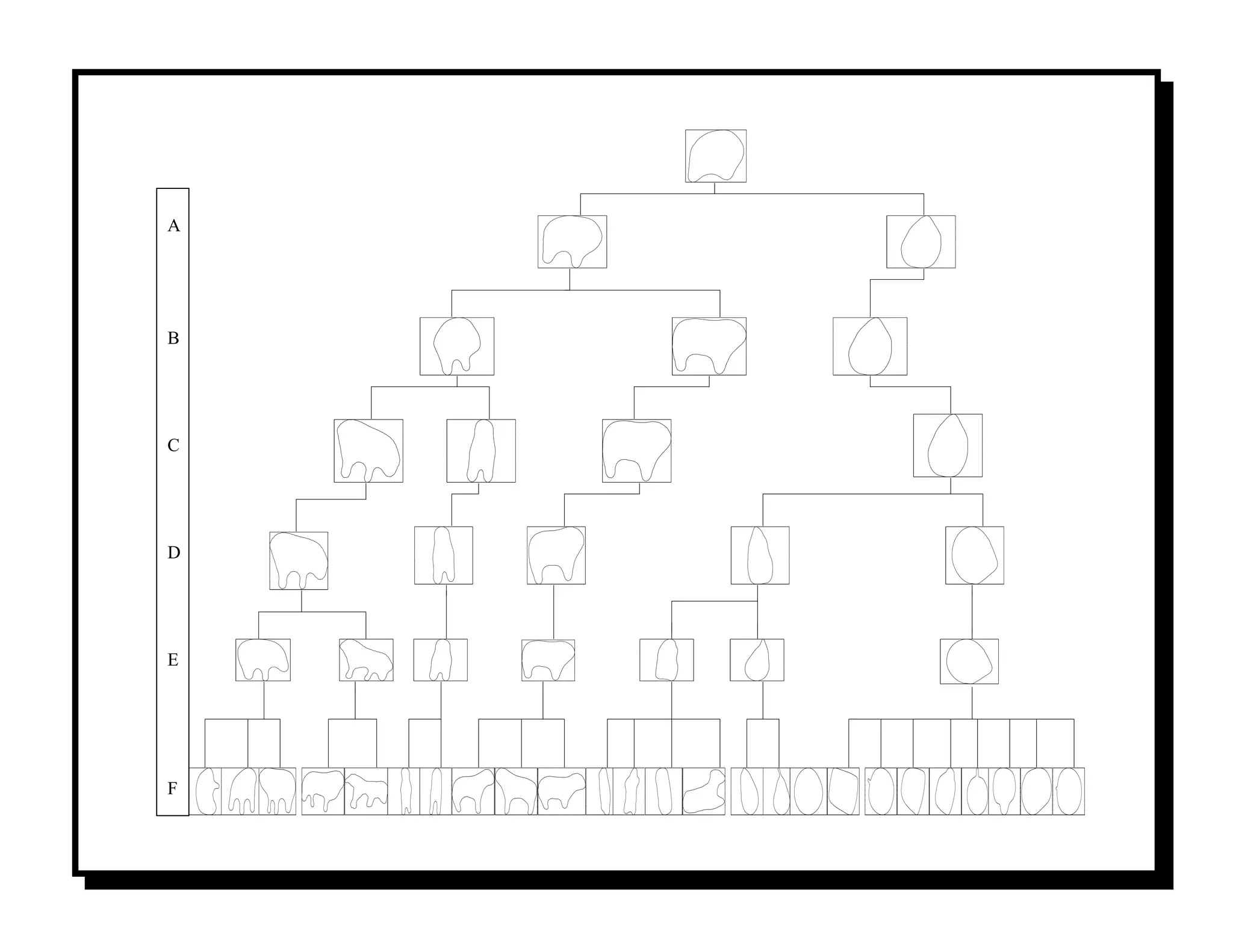
![Goal: We are interested in estimating (or learning) I from the given observations.
Representation: I is a low-dimensional manifold embedded in a large Euclidean
space. We wish to represent individual images by their coefficients in low-dimensional
subspaces.
Solutions: [12]
http://www.cse.msu.edu/ lawhiu/manifold/
1. Isomap: Denote observed images as points on a discrete lattice. Approximate
geodesic lengths on I by shortest graph lengths on this lattice. Perform dimension
reduction, dimension estimation, clustering, etc. using this geodesic length. [11].
2. Locally-linear embedding: [17]
3. Pattern Theoretic Approach:](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-27-2048.jpg)
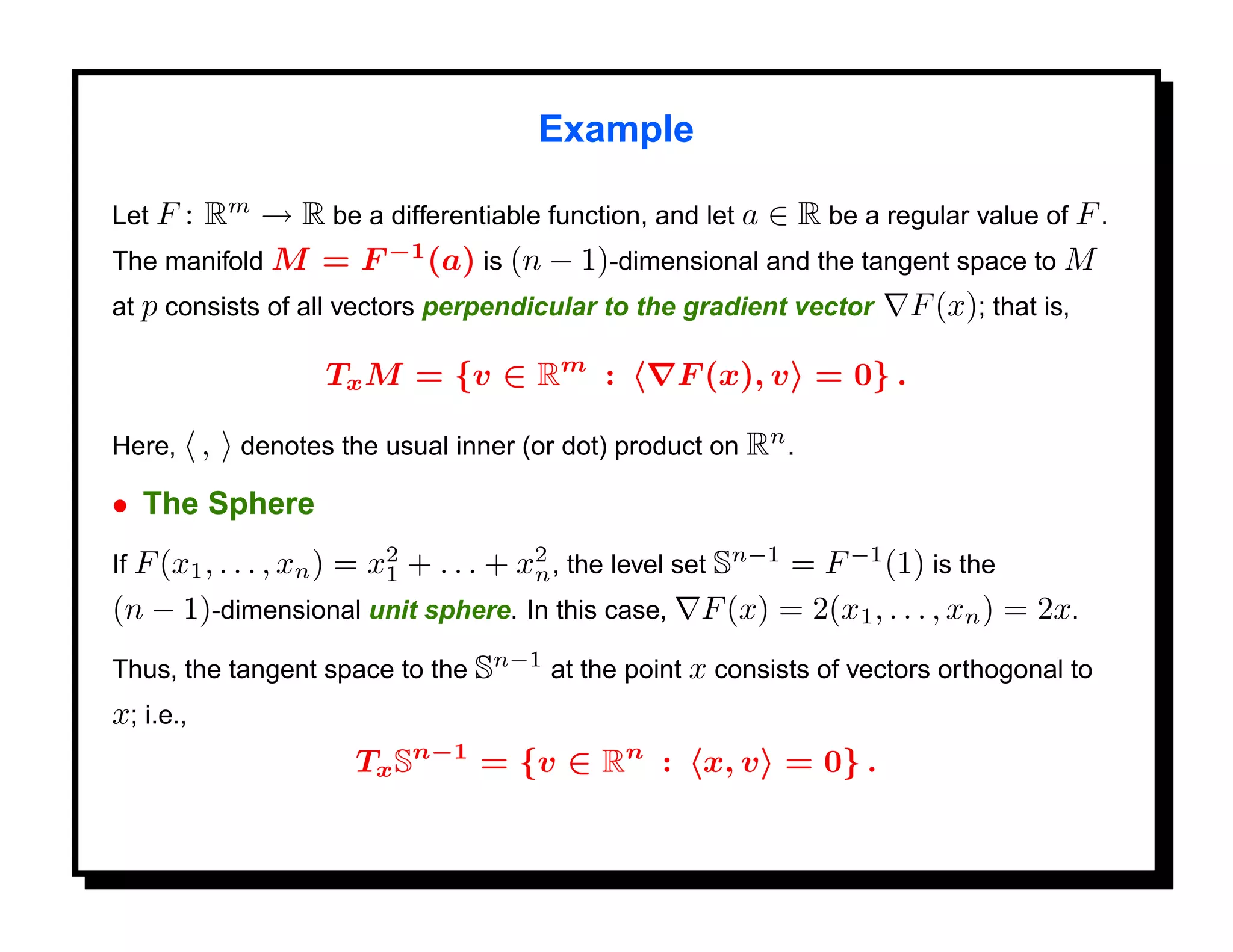
![Differential Geometry on M
Given a manifold M n ⊂ Rm , one can define geometric quantities such as the
length of a curve in M , the area of a 2D region in M , and curvature.
The length of a parametric curve α : [0, 1] → M is defined in the usual way, as
follows. The velocity vector α (t) is a tangent vector to M at the point α(t). The
speed of α at t is given by
1/2
α (t) = [ α (t), α (t) ] ,
and the length of α by
1
L= α (t) dt.
0](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-47-2048.jpg)
![Parametric-Curves Approach
As a preliminary representation, think of a planar shape as a parametric curve
α : I → R2 traversed with constant speed, where I = [0, 1].
To make the representation invariant to uniform scaling, fix the length of α to be 1.
This is equivalent to assuming that α (s) = 1, ∀s ∈ I .
Since α is traversed with unit speed, we can write α (s) = ejθ(s) , where
√
j = −1.
A function θ : I → R with this property is called an angle function for α. Angle
functions are insensitive to translations, and the effect of a rotation is to add a
constant to θ .](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-61-2048.jpg)

![References
[1] W. M. Boothby. An Introduction to Differential Manifolds and Riemannian Geome-
try. Academic Press, Inc., 1986.
[2] I. L. Dryden and K. V. Mardia. Statistical Shape Analysis. John Wiley & Son, 1998.
[3] A. Edelman, T. Arias, and S. T. Smith. The geometry of algorithms with orthogonal-
ity constraints. SIAM Journal of Matrix Analysis and Applications, 20(2):303–353,
1998.
[4] U. Grenander, M. I. Miller, and A. Srivastava. Hilbert-Schmidt lower bounds for
estimators on matrix Lie groups for ATR. IEEE Transactions on PAMI, 20(8):790–
802, 1998.
[5] H. Hendricks. A Cramer-Rao type lower bound for estimators with values in a
manifold. Journal of Multivariate Analysis, 38:245–261, 1991.
[6] K. Kanatani. Geometric Computation for Machine Vision. Clarendon Press, Ox-
ford, 1993.](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-107-2048.jpg)
![[7] E. Klassen, A. Srivastava, W. Mio, and S. Joshi. Analysis of planar shapes using
geodesic paths on shape spaces. IEEE Pattern Analysis and Machiner Intelli-
gence, 26(3):372–383, March, 2004.
[8] X. Liu, A. Srivastava, and K. Gallivan. Optimal linear representations of images
for object recognition. IEEE Transactions on Pattern Analysis and Machine Intelli-
gence, 26(5):662–666, 2004.
[9] K. V. Mardia. Statistics of Directional Data. Academic Press, 1972.
[10] J. M. Oller and J. M. Corcuera. Intrinsic analysis of statistical estimation. Annals
of Statistics, 23(5):1562–1581, 1995.
[11] S. T. Roweis and L. K. Saul. Nonlinear dimensionality reduction by locally linear
embedding. Science, 290:2323–2326, 2000.
[12] H. S. Seung and D. D. Lee. The manifold ways of perception. Science, 290:2268–
2269, 2000.
[13] C. G. Small. The Statistical Theory of Shape. Springer, 1996.](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-108-2048.jpg)
![[14] Michael Spivak. A Comprehensive Introduction to Differential Geometry, Vol I & II.
Publish or Perish, Inc., Berkeley, 1979.
[15] A. Srivastava and E. Klassen. Monte Carlo extrinsic estimators for manifold-valued
parameters. IEEE Trans. on Signal Processing, 50(2):299–308, February 2001.
[16] A. Srivastava and E. Klassen. Bayesian, geometric subspace tracking. Journal for
Advances in Applied Probability, 36(1):43–56, March 2004.
[17] J. B. Tenenbaum, V. Silva, , and J. C. Langford. A global geometric framework for
nonlinear dimensionality reduction. Science, 290:2319–2323, 2000.](https://image.slidesharecdn.com/manifolds-110404112102-phpapp02/75/Nonlinear-Manifolds-in-Computer-Vision-109-2048.jpg)



















































































